г. I I М
:
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Устройство управления тормозом шахтной подъемной машины | 1988 |
|
SU1583342A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1757981A1 |
| Устройство управления тормозом шахтной подъемной машины | 1989 |
|
SU1676981A1 |
| Устройство для управления рабочим торможением подъемной машины | 1980 |
|
SU962169A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство для управления предохранительным тормозом подъемной машины | 1989 |
|
SU1636316A1 |
| Устройство для управления рабочим торможением подъемной машины | 1974 |
|
SU644702A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
Изобретение относится к области шахтных подъемных машии, требующих ограничения динамической интенсивности режима экстренного торможения, и может быть использовано на подъемных установках, оснащенных пневмо- грузовым или пружинно-пневмат1}чес- ким приводом тормоза с эл ектропнев- матическим регулятором рабочего тор- можеиия, в угольной и горнорудной отраслях промьшшенности. Цель изобретения - повышение надежности при упрощении конструкции устройства. Устройство содержит электропневматический регулятор 1 давления с обмоткой 2 управления, соединенной с сель- синным командоаппаратом 3, управляющим величиной тормозного усилия через токовое реле 4, рез истор 5 тормозной ступени и коммутационные замыкающий 6 или размыкающий 7 контакты (соответственно при грузопневма- тическом или пружинно-пневматическом приводе тормоза), которые позицион- но связаны с оперативным переключателем 8 режима работы ограничителя 9 скорости подъемной машины. Резистором 5 задается первая силовая ступень торможения, а установкой переключателя 8 в положение контроля ограничителем 9 скорости малой скорости движения машины замыкается (при грузопневматическом приводе тормоза) контакт 6 или размыкается (при пружинно-пневматическом приводе тормоза) i контакт 7, шунтирующий резистор 5, , и чем обеспечивается возможность по- лучеийя максимального тормозного усилия на рабочем тормозе машины. При возникновении нарушений в цепях управления тормозом реле 4 обесточивается и вьщает сигнал неисправности. 1 ил. I (Л ю со 4i 00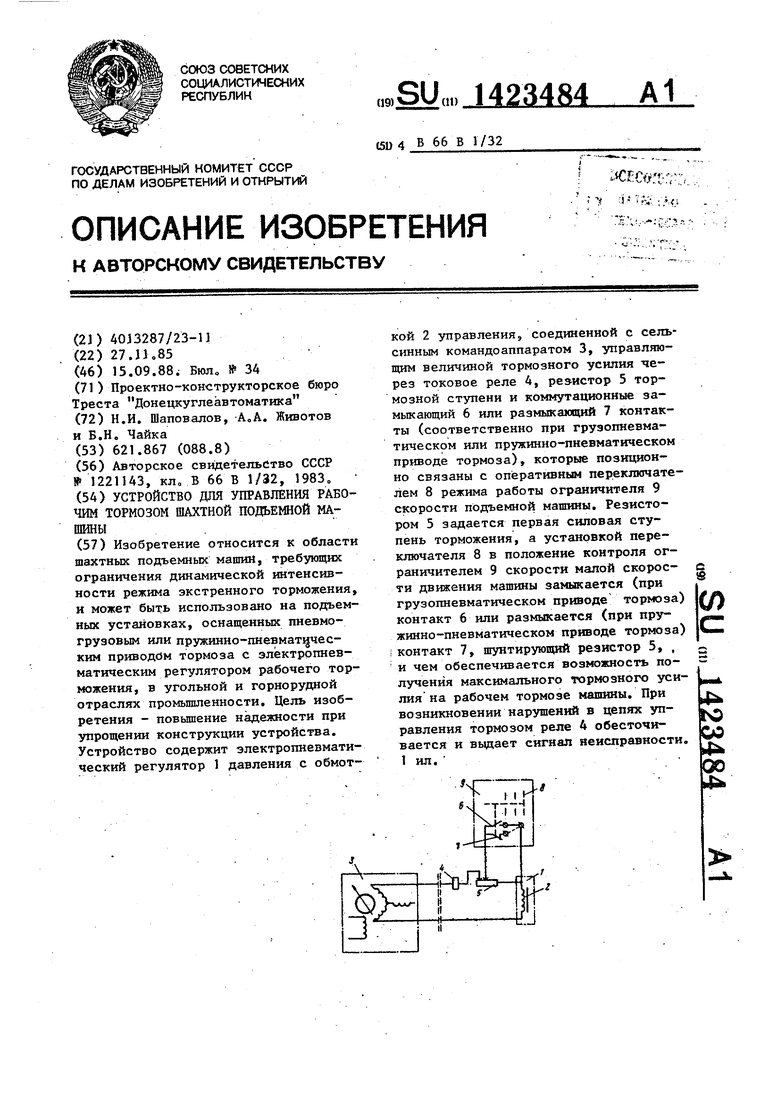
Ъ
j Ж
y. j
Изобретение OTHOG№E©H к шахтным подъемным машинам,, требующим ограничения динам1гческой интенсивности режима экстренного то:рм0жения и может быть использовано ва подъемных установках, оснащенных пнев.могрузовым или пружинно-пневматическим приводом тормоза с электропневматическим регулятором, рабочего торможения в уголь- ной и горнорудной отрастях промьгашен- кости„
Целью изобретения является повьше- ние надежности при упрощении устройства.
На -чертеже показана принципиальная схема устройства.
Устройство содертит электропневма- Т ггческий регулятор 1 давления, обмотка 2 управления которого соединена с сельсинным командоаппаратом 3, управляющим величиной тормозного усилия через токовое реле А, тормозной резистор 5 и коммутационные замыкающий 6 или размыкающий 7 контакты, которые механ1гчески связаны с переключателем 8 режима работы ограничителя 9 скорости подъемной машины.
Устройство работает следующим об-, разом
В случае управления рабочим тормозом подъемной машины,оснап енной пневмогрузовым приводом тормоза, в исходном положении сельсинного коман- доаппарата 3 Заторможено на выходе его находится максимальное напряжение, коммутационный контакт 6 разомкнут и через резистор 5 в цепи обмотки 2 управления регулятора давления протекает ток ограниченной вели- чены, соответствующей порогу первой силовой ступени тормоза, С переводом командоаппарата 3 в положение Расторможено напряжение на его выходе снижается Пропорционально величине перемещения командоаппарата 3 до минимального значения, обуславливающего величину дежурного тока в цепи.об- мотки 2. регулятора i давления, достаточную лишь для удержания токового реле при отсутствии тормозного усилия на выходе регул-ятора I давления.
При необходимости вьшолнения подъемной машиной технологических операций с использованием максимального тормозного усилия второй ступени рабочего торможения, безопасно допустимого только на малой скорости машины, переключатель 8 режимов работы
5
0 50
, Q 5 .
5
ограничителя 9 скоростн устанавливается в положение контроля малой (не более 1,0-1,5 м/с) скорости движения исполнительного органа машины и по- эиционно связанный с ним коммутационный контакт 6 замыкается, шунтируя собой резистор 5 первой ступени торможения. При этом в положении Заторможено ток в цепи регулятора давления возрастает до максимальной величины, а рабочий тормоз развивает максимальное тормозное усилие, В положении Расторможено в цепн регулятора 1 давления протекает дежурный ток, достаточный лишь для удержания включенным токового реле 4,
Автоматический самоконтроль не- правности работы устройства обеспе- чивается тем, что при возникновении нарушений в цепях управления тормозом реле 4 обесточивается и выдает сигнал неисправности I ,,
В случае управле1шя рабочим тормозом подъемной фашины,оснащенной пружинно-пневматическим приводим тормоза работа устройства аналогична описанному для машин с пневмогрузо- вым приводом тормоза; но поскольку пружинно-пневматический привод тормоза отличается от пневмргрузового взаимно обратной характеристической зависимостью регулирования тормозного усилия, в устройстве вместо замыкающего контакта 6 для шунтирования резистора 5 тормозной ступени используется размыкающий коммутационный контакт 7, по:зиционно связанный с переключателем 8 ограничителя скорости 9, При этом перйая ступень торможения обеспечивается при замкнутом положении контакта 7, а вторая ступень с максимальным тормозным усилием - при разомкнутом контакте 7, когда переключатель 8 ограничителя скорости 9 установлен в положение контроля малой скорости движения исполнительного органа подъемной машины.
Формула изобретения
Устройство для управления рабочим тормозом шахтной подъемной машины, содержащее регулятор давления, обмотка которого включена в цепь сельсинного командоаппарата через тормозной резистор с параллельно подключенными к нему коммутационными контактами, ограничитель скорости с
3J4234844
переключателем режимов и токовое ре- контакты механически связаны с пере- ле, отличаю.щееся тем, что, ключателем режимов ограничителя ско- с целью повышения надежности при рости, а токовое реле включено пос- упрощении устройства, коммутационные ледователъно с тормозным резистором.
| Устройство для управления рабочим тормозом шахтных подъемных машин | 1983 |
|
SU1221143A1 |
