1
Изобретение относится к области подъемно-транспортной техники и может быть использовано для управления рабочим тормозом подъемных машин.
Известно устройство для управления рабочим торможением подъемной машины, содержащее сельсинный командоаппарат управления величиной тормозного усилия и регулятор давления с обмоткой управления, подключенной к выходу командоаппарата,{1.
Величина тормозного момента, развиваемого рабочим тормозом машины, определяется величиной перемешения рукоятки командоаппарата правления этого устройства, а скорость нарастания тормозного момента - скоростью перемеш;ения этой рукоятки.
Управление рабочим торможением подъемной машины производится машинистом путем перемещения рукоятки командоаппарата управления из положения «расторможено в направлении «заторможено. Величина и скорость перемещепия рукоятки командоаппарата определяется мащинистом по требуемой интенсивности замедления. При этом любые неточные действия мащиниста, например большая, чем требуется, величина или скорость перемещения рукоятки, могут привести к замедлениям
больше допустимых по правилам безопасности.
Такой недостаток устройства для управления рабочим торможением подъемных
машин приводит к тому, что отсутствует плавность торможения, так как возможно значительное превышение допустимых замедлений и вследствие этого возможны аварии на подъемных установках (проскальзывание канатов, обрывы канатов и т. п.).
Цель изобретения - повышение плавности торможения. Указанная цель достигается тем, что устройство снабжено пороговым нелинейным элементом, подключенным параллельно обмотке управления регулятора давления.
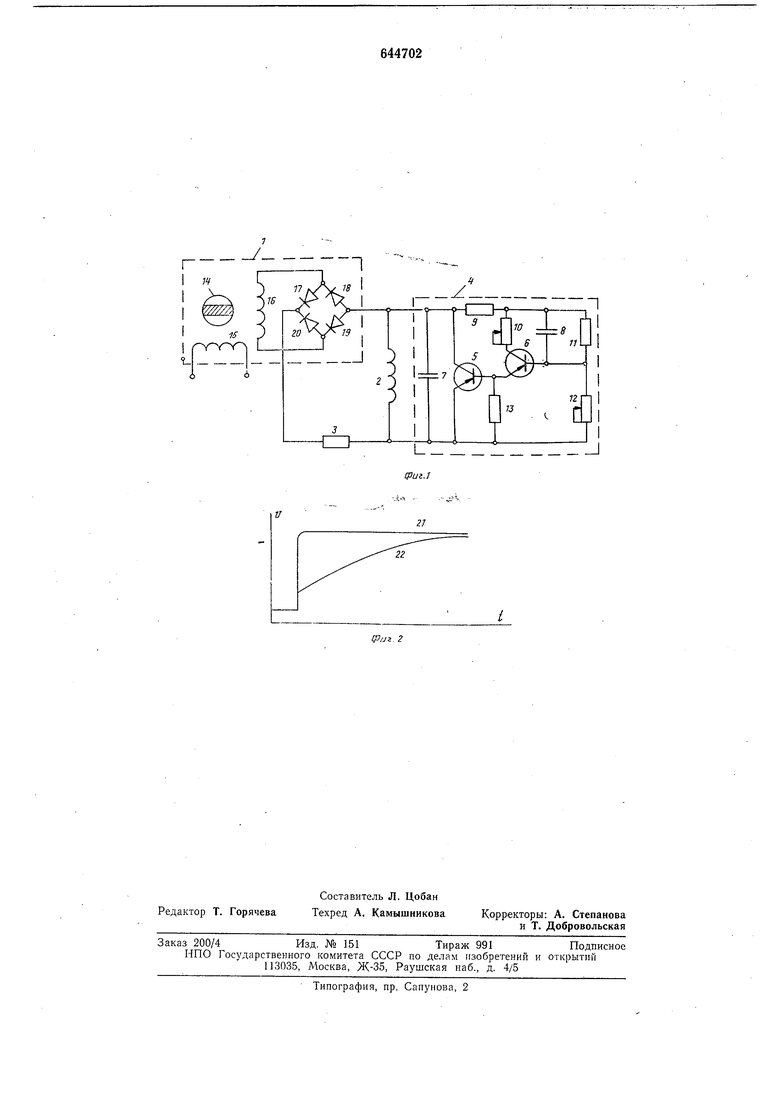
На фиг. 1 показана принципиальная схема предлагаемого устройства; на фиг. 2 -
кривые тока и напряжения, характеризующие работу устройства.
Устройство содержит сельсинный командоаппарат 1 управления величиной тормозного усилия, соединенный с обмоткой 2 управления регулятора давления через ограничивающий резистор 3. Параллельно обмотке 2 управления включен пороговый нелинейный элемент 4, который может быть выполнен на транзисторах 5 и 6, конденсаторах 7 и 8 и резисторах 9-13.
Устройство также содержит ротор 14 бесконтактного сельсина, обмотки 15 и 16 и выпрямительные диоды 17-20 командоаппарата 1.
Работает устройство следующим обра.зом.
В исходном состоянии пололсение рукоятки, связанной с ротором 14 командоаипарата 1, «расторможено - на выходе командоаппарата имеется небольшое напряжение, через обмотку 2 регулятора протекает дежурный ток, конденсаторы 7 и 8 разрял ены, а транзисторы 5 и 6 закрыты. В случае резкого перемещения рукоятки командоаппарата 1 из положения «расторможено в направлении к положению «заторможено на его выходе напряжение увеличивается до величины, соответствующей положению рукоятки командоапнарата. Конденсаторы 7 и 8 начинают заряжаться. Время заряда конденсатора 7 очень мало, поэтому его заряд практически не влияет на ток в обмотке 2 регулятора давления. Конденсатор 7 служит для сглаживания пульсаций выпрямленного иапрялсения после командоаппарата н защиты транзисторов от перенапряжений. При зарядке конденсатора 8 зарядный ток проходит через резистор 12, вызывая иа нем падение наирялсения. Вследствие этого трапзистор 6 открывается н открывает транзистор 5. Ток, проходящий через транзистор 5, вызывает дополнительное падение напрялсения на резисторе 3 и тем самым ток через обмотку 2 регулятора. По мере заряда конденсатора 8 ток через транзистор 6 уменьшается, что приводит к постепеипому запиранию трапзистора 5 и уменьшениюего шунтирующего действия. По окоичанни заряда конденсатора 8 транзисторы 5 и б закрываются.
Таким образом, далее нри резком неремещеиии рукоятки командоаппарата в полол еиие «заторможено ток через обмотку 2 управления регулятора увеличивается постепенно, что вызывает плавное нарастание тормозного момента. Кривая 21 (фиг. 2) показывает измеиение напрялеення на выходе командоаппарата 1 при резком перемещении рукоятки, а кривая 22 - соответствующее ей изменение тока в обмотке 2 регулятора давления (при отсутствии нелинейного элемента кривая тока практически совпадает с кривой напрял ения).
Нелинейный элемент выполнен так, что до определенной величины (порога) напрял ения на выходе командоаипарата 1 он
не шуитнрует обмотку 2 управлений регулятора прн любой cki)pocTH перемещения рукоятки. Это необходимо для того, чтобы при малых тормозных моментах, не могущих вызвать замедлений больше предельно допустимых, повысить управляемость тормоза, т. е. обеспечить строгое соответствие нарастания скорости тормозного момента скорости перемещения рукоятки. Величина иапрял ения командоаппарата, при которой вступает в работу нелинейный элемент, регулируется резистором 10. Скорость нарастания тока в обмотке 2 регулятора регулируется резистором 12. При этом настройка нелинейного элемента производится таким образом, что при резком перемещении рукоятки командоаппарата кривая изменения тока в обмотке 2 уиравлення регулятора давления такова, что обеспечиваются замедления, близкие к предельно допустимым (по не больше). При нормальной работе (без ошибок) машинист в процессе торможения никогда не входит в эту зону замедлений, поэтому в этом случае
элемент 4 не шунтирует обмотку 2 регулятора (при плавном перемещении рукоятки комаидоаппарата величина зарядного тока конденсатора 8 такова, что не вызывает достаточного открывания траизистора 6
и открывания транзистора 5).
Нелинейный элемент вступает в работу только прн резких перемещениях рукоятки командоаипарата управления, т. е. при ошибках машиииста.
Таким образом, использование устройства позволит исключить возмолсность за.медления подъемной машины с замедлениями выше допустимых и тем самым значительно повысить плавность торможения и
безопасность работы нодъемной машины.
Формула изобретения
Устройство для уиравлення рабочим тормолеением подъемной машииы, содерлсаЩее сельсинный командоанпарат управления величиной тормозного усилия и регулятор давления с обмоткой управления, подключенной к выходу командоапиарата, отличающееся тем, что, с целью повышення плавностн тормол ения, оно снабжено пороговым нелинейным элементом, подключенным параллельно обмотке управления регулятора давления.
Источники информации,
нринятые во внимание ири экспертизе
1. Траубе Е. С. «Наладка и эксплуатация защит шахтных нодъемиых установок. М., «Недра, 1969, с. 23-26.
п
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления рабочим тормозом шахтной подъемной машины | 1985 |
|
SU1423484A1 |
| Устройство для управления рабочим торможением подъемной машины | 1980 |
|
SU962169A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1985 |
|
SU1276608A1 |
| Устройство управления рабочим тормозом шахтной подъемной машины | 1987 |
|
SU1669843A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| Способ управления тормозной электрической машиной буровой лебедки | 1981 |
|
SU1046883A1 |
| Устройство для управления рабочим торможением шахтной подъемной машины | 1985 |
|
SU1379215A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |