Изобретение относится к устройствам автоматизации в угольной промышленности.
Цель изобретения - устранение указанных HeflOCfaTKOB прототипа и, как результат, повышение точности системы.
Указанные в отличительной части формулы новые элементы и связи позволяют достичь поставленную цель, т.е. за счет измерения угла наклона корпуса комбайна, обработки информации с двух датчиков угла наклона и вычисления приращений пространственных координат по продольному и поперечному углам наклона оказывается возможным отследить пространственное положение исполнительного органа комбайна без датчика, непосредственно изменяющего вертикальную координату положения исполнительного органа и, следовательно, осуществить управление в обе стороны движения комбайна без недостаточно достоверной получаемой информации об этой координате и без использования операций с плаваю- - щей запятой, что дополнительно повышает точность из-за сокращения процесса вычислений и исключения влияния погрешности выбора значения начальной точки отсчета
на все последующие координаты исполнительного органа.
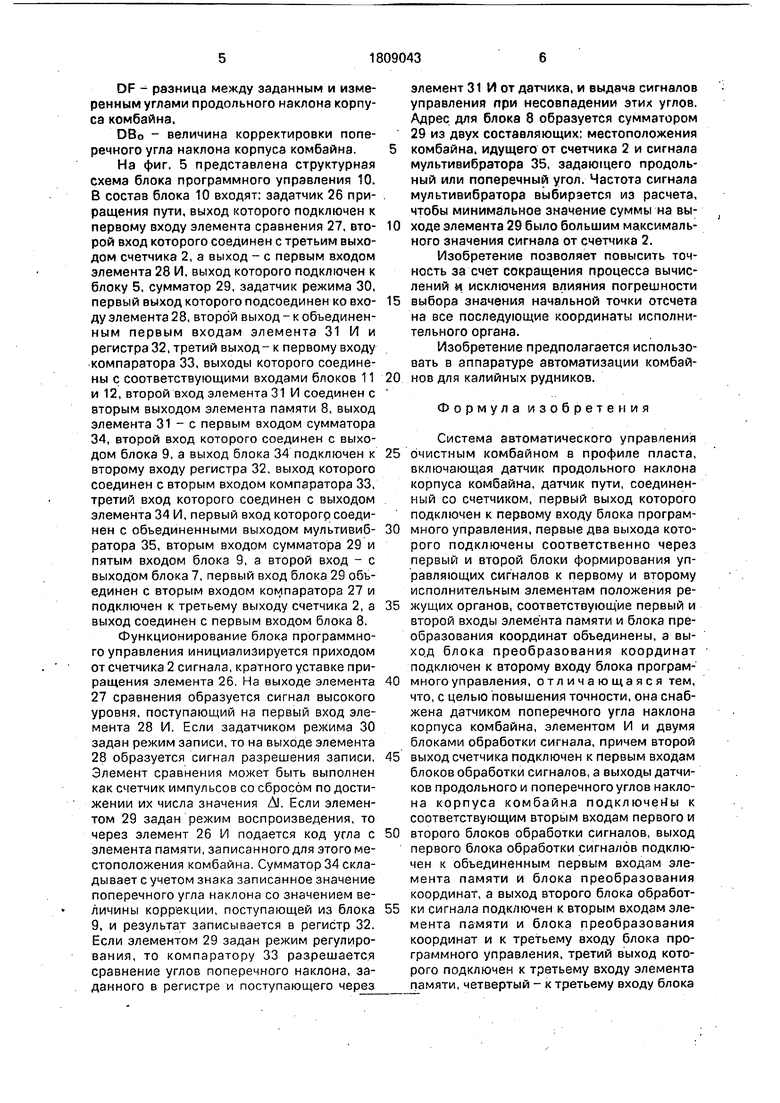
На фиг. 1 приведена структурная схема системы автоматического управления очистным комбайном в профиле пласта; на фиг. 2 дано схематическое изображение объекта управления в пространственной системе координат; на фиг. 3 - структурная схема блока обработки сигналов; на фиг. 4 - то же, блока преобразования координат; на фиг. 5 - то же, блока программного управления.
Система, как показано на фиг. 1, содержит датчик 1 пути, счетчик 2, датчик 3 продольного угла наклона корпуса комбайна, датчик 4 поперечного угла наклона корпуса комбайна, элемент И 5, блоки 6,7 обработки сигналов, элемент памяти 8, блок преобразования координат 9, блок программного управления 10, блоки 11, 12 формирования управляющих сигналов, исполнительные элементы 13,14 положения режущих органов.
Датчик поперечного угла наклона конструктивно такой же, как и датчик продольного угла наклона, отличие в функции осуществляется установкой на комбайне таким образом, чтобы оси вращения этих датчиков были перпендикулярны.
ел
g
GO
Импульсы, поступающие отдатчика 1 по мере движения комбайна, подсчитываются счетчиком 2, используемым в качестве делителя частоты. Период импульсов на выходе 1 счетчика определяет дискрету пути систе- мы (высшая частота), на выходе 2 периодичность опроса датчиков угла (промежуточная частота), а на выходе 3 - периодичность записи информации в память или считывания из памяти.
Элемент памяти 8 может быть выполнен как ОЗУ, в котором по каждому адресу, поступающему на первый вход, хранится пара чисел, соответствующих углам наклона корпуса комбайна в данной точке забоя. Вход 2 элемента памяти - вход разрешения записи, а первый и второй выходы - это выходы ра и (30 соответственно. Количество адресов и объем ОЗУ определяется длиной лавы так, что
с приходом каждого разрешающего запись им
пульса и адреса, осуществляется через блоки обработки информации 6 и 7 запись текущих р /3 . Отсутствием импульса разрешения записи разрешается считывание из памяти.
При вынимаемой мощности пласта Н и изменении продольного угла наклона (р корпуса комбайна, движение исполнительного органа комбайна определяется движением точки С, расположенной на верхней плоскости исполнительного органа, как показано на фиг. 2, где для наглядности начальный угол изображен равным нулю. Векторы АВ и ВС отражают жесткие связи комбайна с режущим органом. Поворотом плоскости этих векторов на угол / вокруг неподвижной оси АВ за счет управления домкратами 13 и 14, находящимися со стороны забоя, системы управления вернет точку С в ту же горизонтальную плоскость, что и при (. В результате, как изображено на фиг. 2, исполнительный орган опустится и на следующем цикле положение корпуса и исполнительного органа относительно почвы станет таким же, как при начальном угле (р,
Запомненные ра и j30 с выходов эле- мента 8 в режиме воспроизведения сравниваются с текущим для данной точки лавы в блоке 9, где вычисляется знак и значение корректировки угла поперечного наклона
комбайна. Значение корректировки с учетом знака складывается в блоке 10с записанным для данного положения комбайна значением угла поперечного наклона, в результате в блоке 10 образуется значение которое необходимо достичь..Блок программного управления 10 будет управлять исполнительными элементами 13 и 14 до тех пор. пока система не отработает требуемое значение.
5
0
5 0 5
0
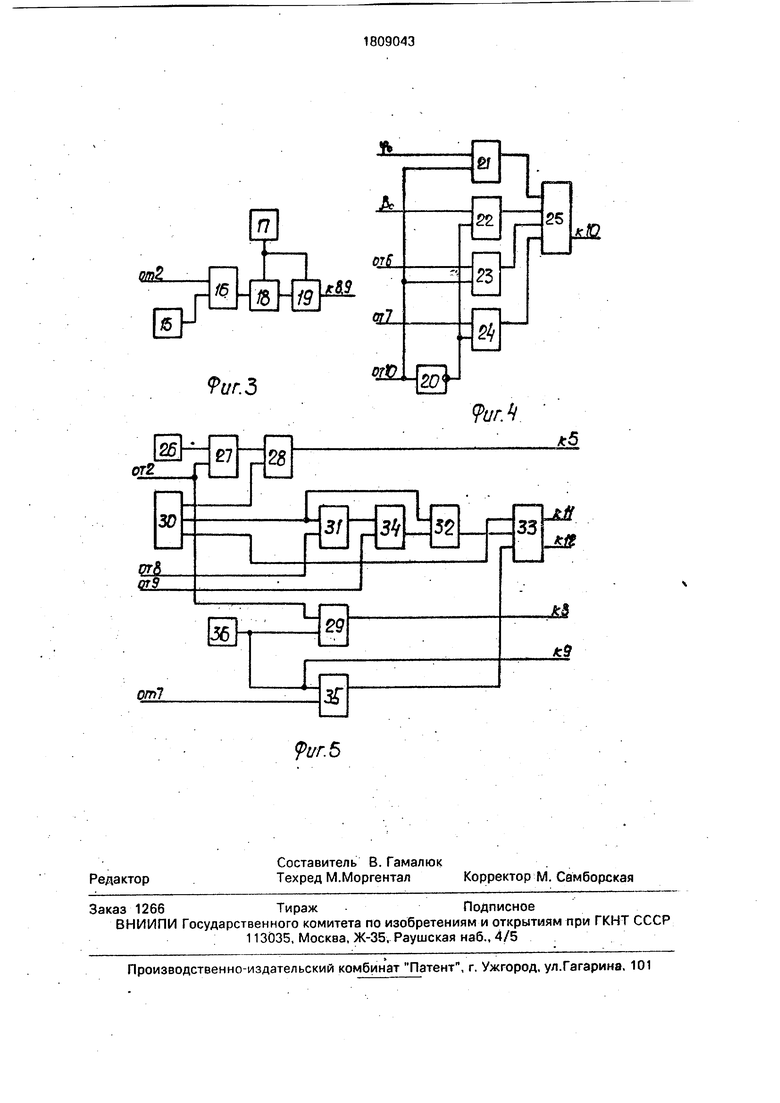
На фиг. 3 представлена структурная схема одного из двух идентичных блоков обработки информации. В его состав входят широтноимпульсный модулятор 15, элемент 16 И, задатчик 17, сумматор 18, делитель 19, первый вход элемента 16 соединен со вторым входом счетчика 2, второй вход соединен через блок 15 с датчиком поперечного угла наклона, а выход со входом схемы усреднения. Так как элементы 17, 18 и 19 являются схемой усреднения, то на выходе блока обработки информации по команде от счетчика 2 образуется среднее арифметическое из п значений угла наклона.
На фиг. 4 изображена структурная схема блока преобразования координат 9. Блок 9 состоит из элемента 20 НЕ, элементов 21...24 И и компаратора 25, причем выход блока 10 подключен к входу элемента 20 и объединенным вторым входом элементов 21 и 23; выход элемента 20 подключен к объединенным вторым входам элементов 22 и. 24, первые входы элементов 21...24 соединены соответственно с первым, вторым выходами элемента памяти 8, выходами блоков 6, 7, а их выходы - с соответствующими входами компаратора 25.
Функционирование блока 9 происходит следующим образом.
Из-за включения через элемент 20 вторых входов элементов 21, 23 и 22, 24 при одновременном наличии сигналов от блоков 6 и 7 на входы компаратора будут пропущены значения текущего и запомненного углов либо продольного либо поперечного наклона. Компаратор 25 работает по следующим соотношениям для кодов переменных:
-(Р6-Р8) F8 DF-Г
1 +(F8-F
KF8-F6) для F6 F8
-(В7-В8)для В7 В8
т(В8-В7)для В7 В8
DB0 DB+DF
где В6 - измеренный угол поперечного наклона корпуса комбайна,
F7 - измеренный угол продольного наклона корпуса комбайна.
В8, F8 - заданные углы поперечного и продольного наклонов корпуса комбайна, поступающие с элемента памяти 8,
DB - разница между заданным и измеренным углами поперечного наклона корпуса комбайна,
DF - разница между заданным и измеренным углами продольного наклона корпуса комбайна,
DBo - величина корректировки поперечного угла наклона корпуса комбайна.
На фиг. 5 представлена структурная схема блока программного управления 10. В состав блока 10 входят: задатчик 26 при- ращения пути, выход которого подключен к первому входу элемента сравнения 27, вто- рой вход которого соединен с третьим выходом счетчика 2, а выход - с первым входом элемента 28 И, выход которого подключен к блоку 5, сумматор 29, задатчик режима 30, первый выход которого подсоединен ко вхо- ду элемента 28, второй выход - к объединен- ным первым входам элемента 31 И и регистра 32, третий выход- к первому входу компаратора 33, выходы которого соединены с соответствующими входами блоков 11 и 12, второй вход элемента 31 И соединен с вторым выходом элемента памяти 8, выход элемента 31 - с первым входом сумматора 34, второй вход которого соединен с выходом блока 9, а выход блока 34 подключен к второму входу регистра 32, выход которого соединен с вторым входом компаратора 33, третий вход которого соединен с выходом элемента 34 И, первый вход которого соединен с объединенными выходом мультивиб- ратора 35, вторым входом сумматора 29 и пятым входом блока 9, а второй вход - с выходом блока 7, первый вход блока 29 объединен с вторым входом компаратора 27 и подключен к третьему выходу счетчика 2, а выход соединен с первым входом блока 8.
Функционирование блока программного управления инициализируется приходом от счетчика 2 сигнала, кратного уставке приращения элемента 26. На выходе элемента
27 сравнения образуется сигнал высокого уровня, поступающий на первый вход элемента 28 И. Если задатчиком режима 30 задан режим записи, то на выходе элемента
28 образуется сигнал разрешения записи. Элемент сравнения может быть выполнен как счетчик импульсов со сбросом по достижении их числа значения Д|. Если элементом 29 задан режим воспроизведения, то через элемент 26 И подается код угла с элемента памяти, записанного для этого местоположения комбайна. Сумматор 34 складывает с учетом знака записанное значение поперечного угла наклона со значением величины коррекции, поступающей из блока 9, и результат записывается в регистр 32. Если элементом 29 задан режим регулирования, то компаратору 33 разрешается сравнение углов поперечного наклона, заданного в регистре и поступающего через
элемент 31 И от датчика, и выдача сигналов управления при несовпадении этих углов. Адрес для блока 8 образуется сумматором 29 из двух составляющих: местоположения комбайна, идущего от счетчика 2 и сигнала мультивибратора 35, задающего продольный или поперечный угол. Частота сигнала мультивибратора выбирается из расчета, чтобы минимальное значение суммы на выходе элемента 29 было большим максимального значения сигнала от счетчика 2.
Изобретение позволяет повысить точность за счет сокращения процесса вычислений ц исключения влияния погрешности выбора значения начальной точки отсчета на все последующие координаты исполнительного органа.
Изобретение предполагается использовать в аппаратуре автоматизации комбайнов для калийных рудников.
Формула изобретения
Система автоматического управления очистным комбайном в профиле пласта, включающая датчик продольного наклона корпуса комбайна, датчик пути, соединенный со счетчиком, первый выход которого подключен к первому входу блока программного управления, первые два выхода которого подключены соответственно через первый и второй блоки формирования управляющих сигналов к первому и второму исполнительным элементам положения режущих органов, соответствующие первый и второй входы элемента памяти и блока преобразования координат объединены, а вы- хо.д блока преобразования координат подключен к второму входу блока программного управления, отличающаяся тем, что, с целью повышения точности, она снабжена датчиком поперечного угла наклона корпуса комбайна, элементом 1/1 и двумя блоками обработки сигнала, причем второй выход счетчика подключен к первым входам блоков обработки сигналов, а выходы датчиков продольного и поперечного углов наклона корпуса комбайна подключены к соответствующим вторым входам первого и второго блоков обработки сигналов, выход первого блока обработки сигналов подключен к объединенным первым входам элемента памяти и блока преобразования координат, а выход второго блока обработки сигнала подключен к вторым входам элемента памяти и блока преобразования координат и к третьему входу блока программного управления, третий выход которого подключен к третьему входу элемента памяти, четвертый - к третьему входу блока
преобразования координат, а пятый - к первому входу элемента И, выход которого подключен к четвертому входу элемента памяти, первый выход которого подключен
координат, а второй - к пят преобразования координат входу блока программного у этом третий выход счетчик
к четвертому входу блока преобразования 5 второму входу элемента И.
координат, а второй - к пятому входу блока преобразования координат и к четвертому входу блока программного управления, при этом третий выход счетчика подключен к
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| Способ управления очистным комбайном и устройство для его осуществления | 1990 |
|
SU1809042A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Способ автоматического управления режущими органами очистного комбайна | 1986 |
|
SU1472670A1 |
| Устройство для управления демпфированием колебаний многослойных конструкций | 1983 |
|
SU1176308A1 |
| Устройство для контроля и управления технологическим процессом тренировки и испытаний фотоэлектронных умножителей | 1986 |
|
SU1325516A1 |
| Система программного управления очистным комбайном в профиле калийного пласта | 1989 |
|
SU1810534A1 |
Срдержит: датчик пути, счетчик, датчик пррдощ,ного угла наклона, датчик поперечного угда наклона,, элемент И. блоки обработки сигналов, элемент памяти, блок преобразования координат, блок программного управления, блоки формирования управляющих сигналов, исполнительные элементы. 5 ил.
Фиг/
Фог.2
«
lЈfil
Фиг.З
Pt/r.5
orf
or7
orV.
ЙУЛ.
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
