8j
4
ю
J
со
CD
Фиг
Изобретение относится к машиностроению, а именно к кузнечно-пр ессовому оборудованию.
Цель изобретения - повышение надежности устройства автоматической замены нуансонодержателей координатно-револьвер- ного пресса.
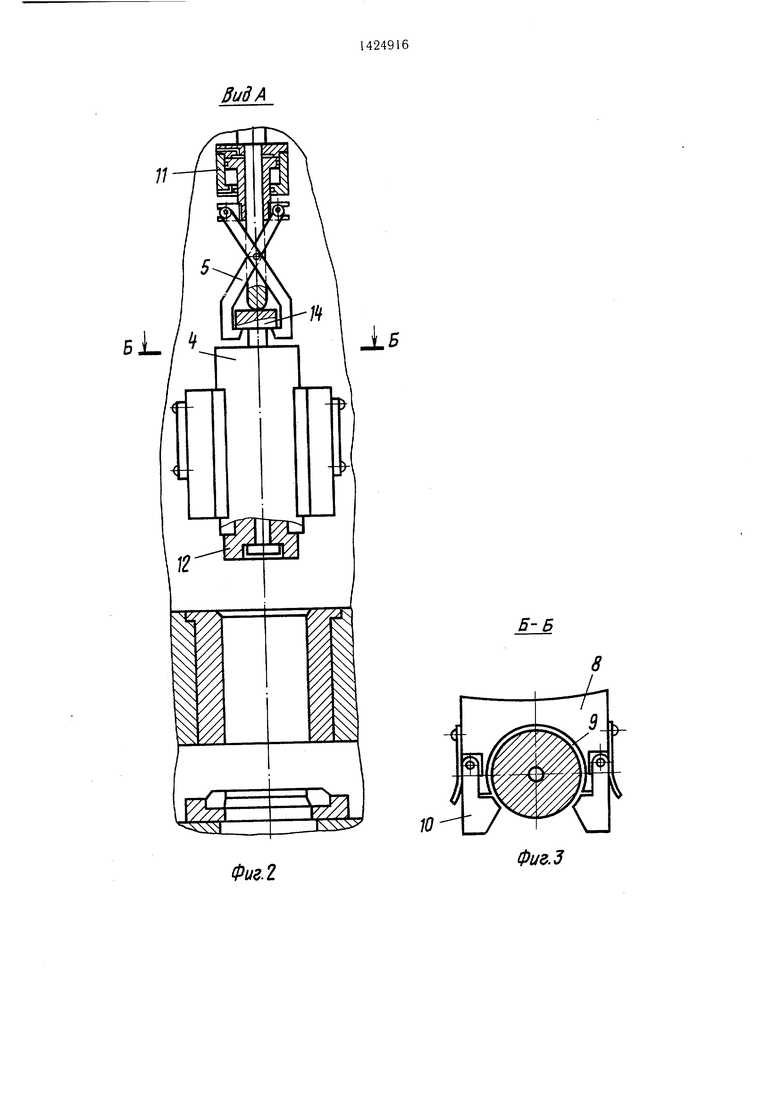
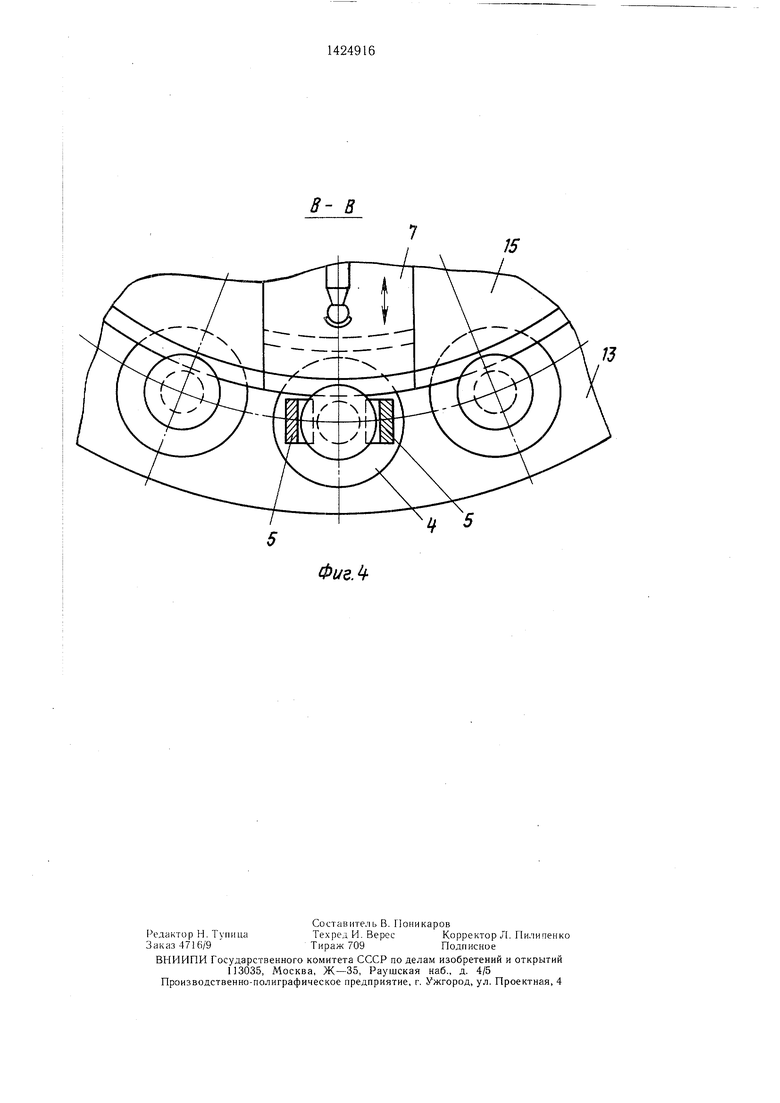
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 1.
Устройство содержит установленный на станине 1 пресса силовой цилиндр 2, закрепленный шарнирно на штоке 3 цилиндра 2 с возможностью взаимодействия с пуансоно- держателем 4, захват 5, расположенную на станине 1 пресса с возможностью возвратно- |поступательного перемещения от привода 6 |и взаимодействия с пуансонодержателем 4 Ьпорную планку 7, закрепленный на стани- |не 1 пресса соосно цилиндру 2 направ- ляющий корпус 8 с центральной расточ- 9, диаметром превышающей поперечные эазмеры пуансонодержателя 4 и захвата 5, установленные на корпусе 8 с возможностью взаимодействия с пуансонодержателем 4 два тодпружиненных замковых рычага 10, уста- товленный на щтоке 3 цилиндра 2 привод 11 захвата 5.
При этом пуансонодержатели 4 с пуан- |:онами 12 устанавливают на поворотном диске 13, пуансонодержатели 4 имеют в верхней части хвостовик 14, с помощью которого они опираются на поддерживающий диск 15 и взаимодействуют с захватом 5, планка 7 азмещается. на позиции смены инстру.мента.
Смена инструмента осуществляется следующим образом.
I В исходном положении шток 3 силового рлиндра 2 находится в крайнем верхнем 1|10ложении, а захват 5 раскрыт. При подаче Команды на смену инструмента включается с|иловой цилиндр 2, щток 3 опускается в ниж- Нее положение, захват 5 проходит через на- г)равляющий корпус 8.
По команде от системы управления производится зажим хвостовика 14 пуансонодержателя 4 захвато.м 5, после чего срабатывает цилиндр 6 и планка 7 отводится в правое положение, обеспечивая тем самым про- хюд пуансонодержателя 4. По команде срабатывает силовой цилиндр 2 и шток 3, перемещаясь вверх, подает пуансонодержа- тель 4 в направляющий корпус 8. Захват робота (не показан) зажимает пуансоно- держатель 4, после чего по команде от системы управления захват 5 освобождает хвостовик 14 пуансонодержателя 4 и пуансоно- держатель, взаимодействуя своей наружной поверхностью с замковыми рычагами 10.
Пуансонодержатель 4 с инструментом удаляется из направляющего корпуса 8 роботом (механической рукой) и устанавливается в склад инструментов. Из склада захват робота берет пуансонодержатель с другим инструментом и подает его в направляющий корпус.
Наружная поверхность пуансонодержате-. ля, воздействуя на скошенную поверхность
замковых рычагов 10, раздвигает последние. Пуансонодержатель 4 входит в направляющий корпус и рычаги 10 замыкают пуансонодержатель 4. По команде включается пневмоцилиндр 11, производится зажим хвостовика пуансонодержателя захватом 5. Учитывая то, что ось расточки поворотного диска 13 на позиции смены инструмента может иметь отклонение от соосности с осью направляющего корпуса (ошибка позиционирования), ось пуансонодержателя может не
г совпадать с осью гнезда. Это отклонение от соосности компенсируется за счет перемещения пуансонодержателя в зазоре направляющего корпуса.
При подаче команды включается силовой цилиндр 2, опускается шток 3, захват 5
0 проходит через направляющий корпус, пуансонодержатель 4 при движении в направляющем корпусе выравнивается и, занимая положение, соосное с гнездом поворотного диска 13, входит в последнее. По команде срабатывает цилиндр 6 и отводит планку 7 в левое положение, зажимая хвостовик пуансонодержателя 4. По команде захват 5 освобождает хвостовик 14 пуансонодержателя 4, включается силовой цилиндр 2 и отводит щток 3 в крайнее верхнее положение. Смена
Q пуансонодержателя с инструментом завершена.
Преимущество предлагаемого технического решения по сравнению с известным состоит в том, что наличие направляющего корпуса и его конструкция позволяют про5 извести выравнивание и центрирование пуансонодержателя, исключить перекосы и заклинивание последнего при его смене, что повы- щает надежность работы всего устройства.
40
Формула изобретения
Устройство автоматической замены пуан- сонодержателей координатно-револьверного пресса, содержащее установленный на станине пресса силовой цилиндр, закрепленный на
5 щтоке силового цилиндра с возможностью взаимодействия с пуансонодержателем захват, а также расположенную на станине пресса с возможностью возвратно-поступательного перемещения от привода и взаи.ю- действия с пуансонодержателем опорную
0 планку, отличающееся тем, что, с целью повышения надежности, оно снабжено закрепленным на станине пресса соосно силовому цилиндру направляющим корпусом с центральной расточкой, диаметром превышающей поперечные размеры пуансонодержателя
5 и захвата, а также установленными на направляющем корпусе с возможностью взаимодействия с пуансонодержателем двумя подпружиненными замковы.ми рычага.ми.
5ид А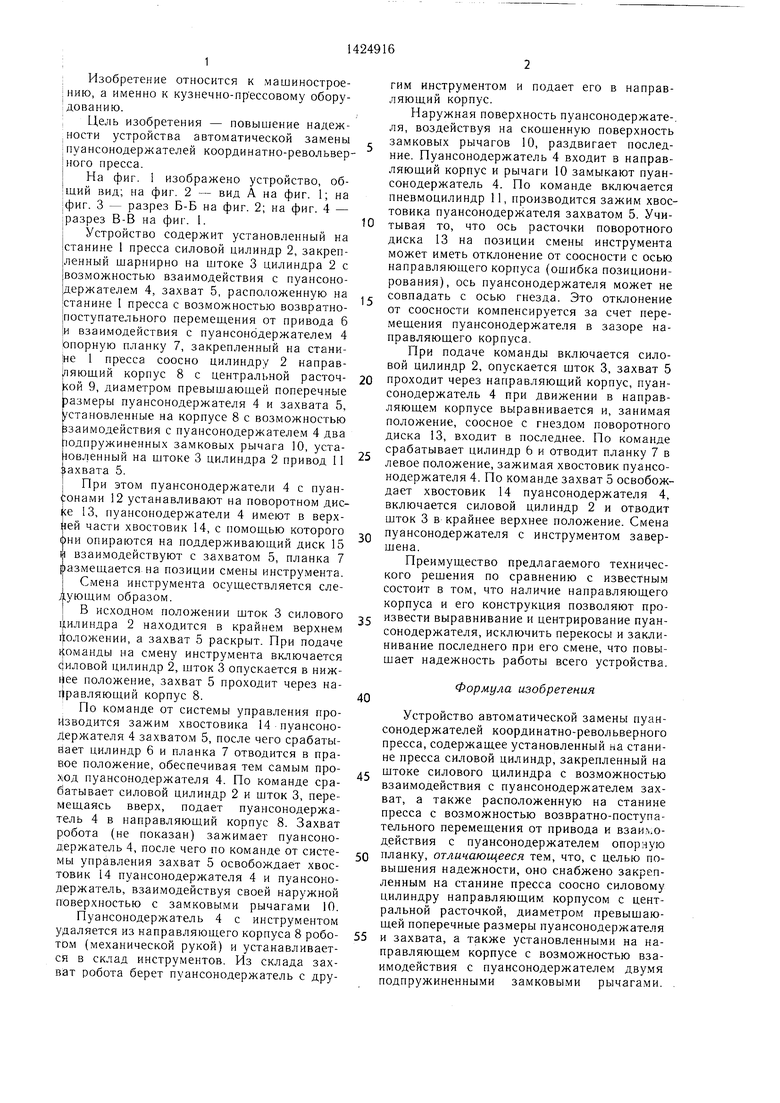
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической замены пуансонодержателей координатно-револьверного пресса | 1990 |
|
SU1807908A3 |
| Вибрационный пресс | 1977 |
|
SU770636A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Пробивной револьверный пресс | 1987 |
|
SU1496870A1 |
| Устройство для замены инструментальных блоков на прессах | 1988 |
|
SU1574340A1 |
| Способ листовой штамповки и устройство для его осуществления | 1989 |
|
SU1712031A1 |
| Штамп для гибки штучных заготовок из листа и проволоки | 1984 |
|
SU1205968A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство для смены инструментов на дыропробивном прессе | 1987 |
|
SU1642948A3 |
| Робототехнологический комплекс для сборки | 1990 |
|
SU1782203A3 |
Изобретение относится к области машиностроения, а именно к устройствам автоматической замены пуансонодержателей куз- нечно-прессового оборудования. Цель изобретения - повышение надежности. Устройство содержит установленный на станине 1 пресса силовой цилиндр (Ц) 2, закрепленный на штоке 3 Ц 2 захват 5, опорную планку 7, закрепленный на станине 1 пресса соосно с Ц 2 нап.равляюш,ий корпус (К) 8 с центральной расточкой, которой превышает размеры пуансонодержателя (П) 4 и захвата 5. На К 8 смонтированы два подпружиненных рычага 10 и привод 11 захвата 5. П 4 с пуансонами 12 устанавливают на поворотном диске 13. При помощи Ц 2 шток 3 опускается, захват 5 проходит через К 8 и зажимает хвостовик П 4, планка 7 отводится в сторону и Ц 2 подает П 4 в К 8, захват робота зажимает П 4, а захват 5 раскрывается, роботом П 4 удаляется из К 8 на склад. Наличие направляющего корпуса и его конструкция позволяют произвести выравнивание и центрирование пуансона, исключить перекосы и заклинивание последнего при его смене. 4 Hvi. с S (Л с
sL/
Фиг. 2
Б-Б
Фие.З
8- В
ФигЛ
| ИЗБИРАТЕЛЬНЫЙ УСИЛИТЕЛЬ | 2012 |
|
RU2475948C1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
