4;; ю
сд о
00
жень 12., при этом пружина 15 продвигает ползун 4 в направлении к кольцу 5, сводя таким образом, посредством шарнирно закрепленных, на ползуне 4 тяг 3 губв:и 2j зайтамая меясцу ндаш захватываемый предмет При этом бородка 11 фиксатора 9, нажимая на скос пилообразного выреза кольца 5, поворачивает его на половину шага нарезки вырезов и входит в паз 7 кольца 5, не препятствуя движению ползуна 4. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1982 |
|
SU1071420A1 |
| Захватное устройство | 1988 |
|
SU1535716A1 |
| Захватное устройство | 1985 |
|
SU1303404A1 |
| Клещевая головка ковочного манипулятора | 1987 |
|
SU1449229A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| Захватное устройство | 1984 |
|
SU1222543A1 |
| КРЕПЕЖНЫЙ ЭЛЕМЕНТ ДЛЯ АППАРАТА НАРУЖНОЙ ФИКСАЦИИ КОСТЕЙ И ИНСТРУМЕНТ ДЛЯ ЕГО УСТАНОВКИ | 2017 |
|
RU2669480C1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Захватное устройство | 1988 |
|
SU1625683A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
Изобретение относится к захватным органам манипуляторов и может быть исполь.зовано в конструкциях про- мышленных роботов. Целью изобретения является расширение области применения устройства. В процессе работы манипулятор накладывает закрепленное на его руке за стержень 12 захватное устройство с разведенными зажимными губками 2 на захватываемый предмет. При этом губки 2 опираются на поверхность, на которой находится захватываемый предмет, стержень 12 перемещает с помопц ю штифта 13 ползун 4, выводит бородку 11 фиксатора 9 из зацепления с нижним пилообразным вырезом, одновременно вводя зуб 10 в верхний пилообразньй вырез. При этом кольцо 5 поворачивается вокруг корпуса 1 на половину шага нарезки пилообразных вырезов, после чего манипулятор поднимает захват за стер
Изобретение относится к захватным органам манипуляторов и может быть использовано в конструкциях промышленных роботов 5 оснащенных преш«гуще- ственно .многозвенными манипулятора Шо
Цель изобретения раскшрение областей применения устройства, заключающееся в придании ему свойства без переналадки захватывать предметы раз- ньк типоразмеров, повышение надежности удержания захваченных предметов.
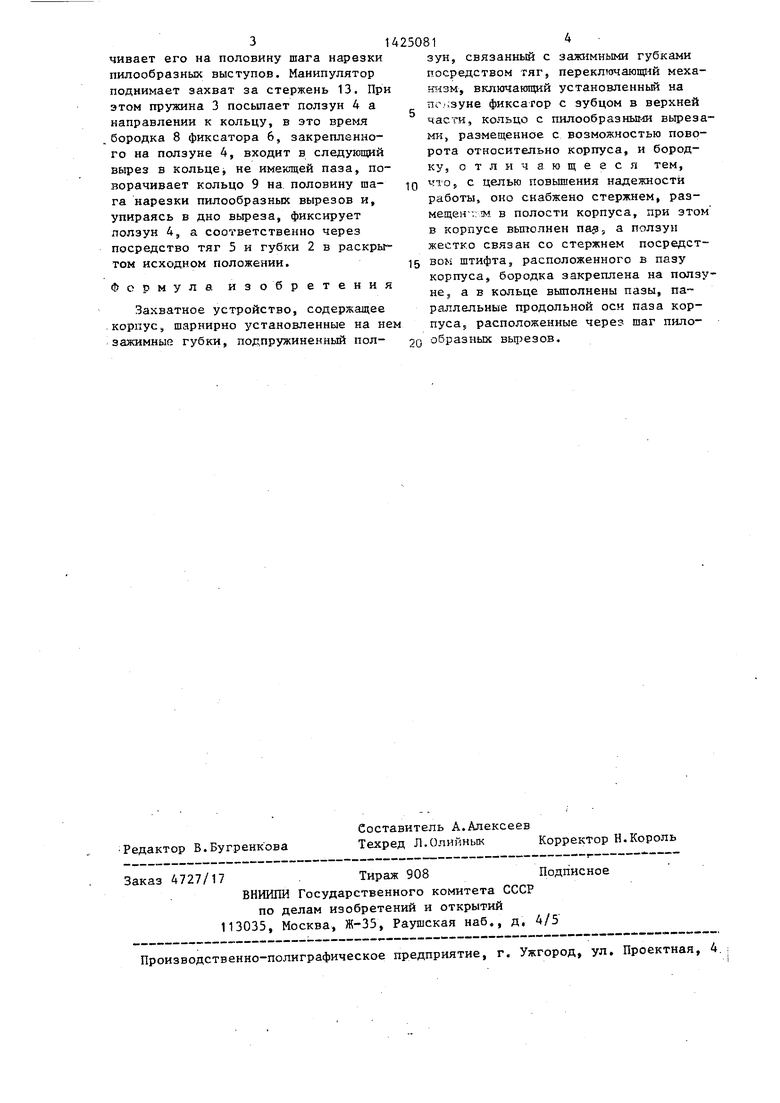
На чертеже показано захватное устройство в положении с раскрытыми губками - исходное положение, обгщШ В1ед „
Захватное устройство содержит полый корпус 15 шарнирко установленные на нем зажимные губки 2, подпружинен- ньм прркиной 3 ползун 4, связанньш с зажимньн-о- губками 2 посредством тяг 59 переключающий механизм включаю--. пщй установленный на ползуне 4 фиксатор 6 с зубом 7 и бородкой 8, и кольцо 9, расположенное на корпусе 1 выше ползуна. 4, Кол1:.цо 9 имеет пилообразные выр-езы 10 и п.араг1.лел.ьные продольной оси корпуса пазы 11 расположенные через шаг пилообразных вырезов 10, и может поворачиваться вокруг корпуса 1, От продольного смещения кольцо 9 удерживается штифтаг-ш 12, выступагощюш из внутренней части .кольца 9 в круговой пая ка корпусе 1 (паз не показан),
Во внутренней полости корпуса 1 размещен стержень 13. Корпус 1 имеет продоль.ные пазы 14,, через которые стержень 13 с помощью штифта 15 жестко связан с ползуном 4. .
Устройство работает след уялци образом.
В процессе работы манипулятор накладывает закрегшенное на его руке за стержень 13 захватное; устройство
0
5
0
5
0
с разведенными зажимными губками 2 на захватываемый предмет. При этом губки 2 опираются или о поверхность, на которой находится захватываемьй предмет, или непосредственно о за.хватыва- емый предмет. Точки опоры могут находиться как на кончиках губок так и в любом другом месте внутри зева за; свата. Под давлением манипулятора стержень 13 перемещает с помощью штифта 15 ползун 4, выводит бородку 8.фиксатора 6 из зацепления с нижним пи.пообразным вырезом, одновременно вводя зуб 7 в верхний пилообразный вырез. При этом кольцо поворачивается ВОКРУГ корпуса 1 на половину шага нарезки пилообразных вырезов. После чего манипулятор полностью поднимает захват за стержень 13, при этом пру-, жина 3 продвигает ползун 4 в направлении, к кольцу 9, йводя, таким образом, посредством шарнирно закрепленных на ползуне 4 тяг 9 губки 2, за- лшмая между ниг-с-: захватьшаемый предмет. При этом бородка 8 фиксатора 6, нажимая нй скос пилообразного выреза кольца 9, пО Зорачивает его на половину шага нарезки вырезов и входит в паз кольца 9, не препятствуя движению ползуна 4. Далее осуществляются заданные манипуляции с предметом. При установке предме та в заданное место манипулятор нажимает на стержень 13, который посредством штифта 15 перемещает ползун 4 вдоль корпуса 1, сжимая пружину 3, разводя при этом через тяги 5 губки 2, освобождая захваченный предмет. Перемещаясь по корпусу 1 в направлении сжатия пружины 3, ползун 4 выводит бородку 8 фиксатора 6 из паэа 11 кольца 9, При этом зуб 7 фиксатора 6,, нажимая на скос очередного лилообраз-него Bbipesa кольца
вновь поворачивает его на половину шага нарезки пилообразных выступов. Манипулятор поднимает захват за стержень 13. При этом пружина 3 посьшает ползун 4 а направлении к кольцу, в это время бородка 8 фиксатора 6, закрепленного на ползуне 4, входит в следующий вырез в кольцеi не именяцей паза, поворачивает кольцо 9 на половину шага нарезки пилообразных вьфезов и, упираясь в дно выреза, фиксирует лолзун 4, а соответственно через посредство тяг 5 и губки 2 в раскры™ том исходном положении.
Формула изобретения
Захватное устройство, содержащее .корпус, шарнирно установленные на не зажимные губки, подпружиненный пол
зун, связанный с зажимными губками посредством тяг, перекл очающий механизм, включающий установленный на по1;зуне фиксатор с зубцом в верхней части, кольцо с пилообразшл-ш вьфеза- ми, размещенное с возможностью поворота относительно корпуса, и бородку, отличающееся тем, что, с целью повышения надежности работы, оно снабжено стержнем, раз- мещен--.:м в полости корпуса, при этом в корпусе вьтолнен паз s а ползун жестко связан со стержнем посредством штифта, расположенного в пазу корпуса, бородка закреплена на ползуне, а в кольце выполнены пазы, параллельные продольной оси паза корпуса, расположенные через шаг пилообразных вьфезов.
| Схват манипулятора | 1982 |
|
SU1071420A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
