1Ъ
S-S
(Л
Изобретение оттлосктся к машино- ;строению, а именно к автооператорам для автоматизации технологических процессов.
Цель изобретения - повышение надежности работы с деталями типа кассет, имеюащх сверху отбортовку, путем подхватывания их снизу за отбортовку .
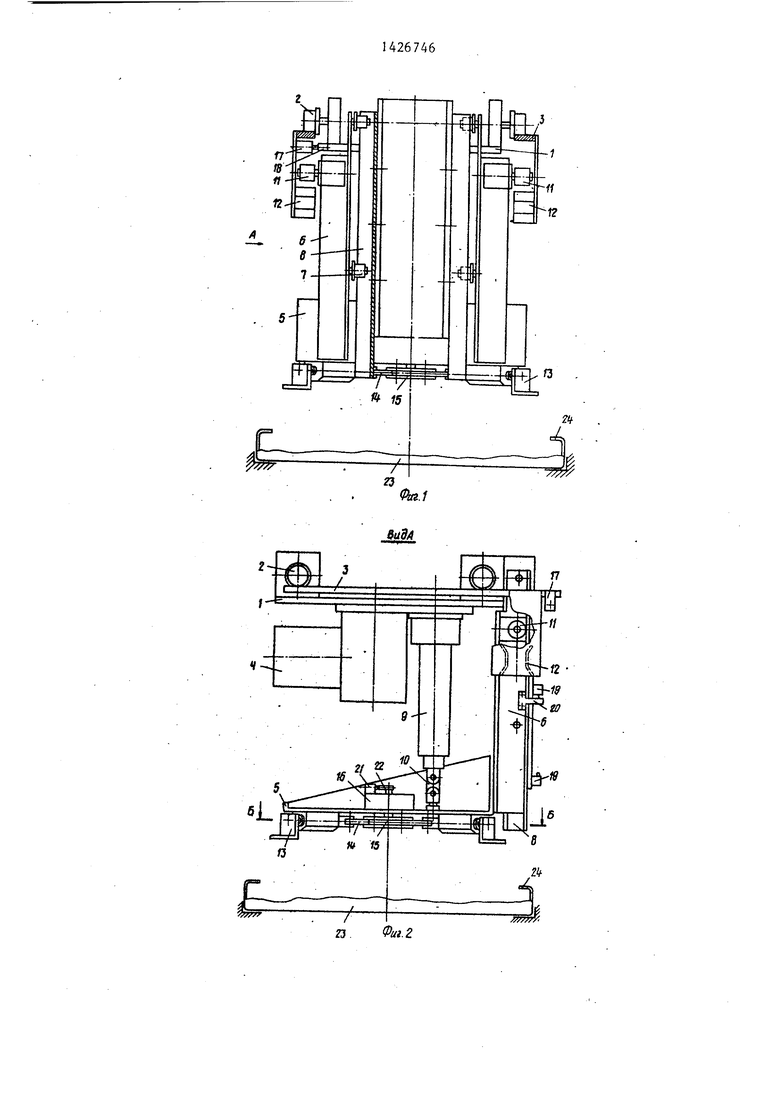
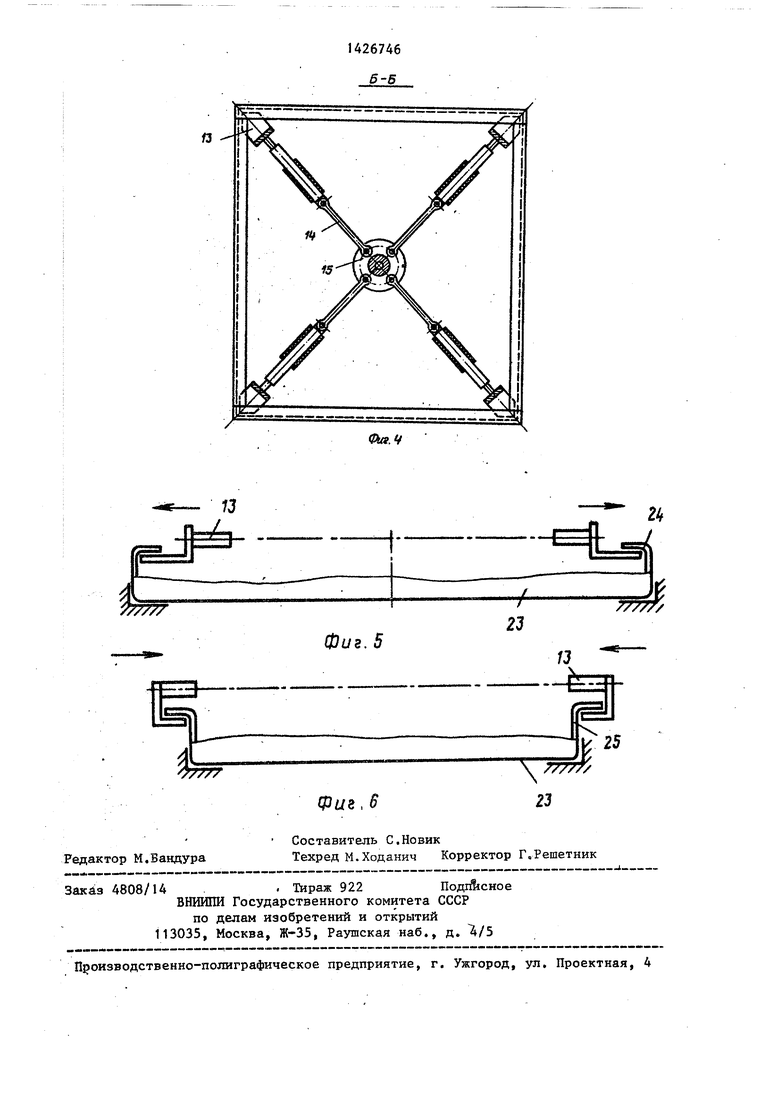
На фиг.1 изображен автооператор, общий ВИД} на фиг.2 - вид А на фиг.; на фиг.3 - разрез Б-Б HJI фиг.2 (фиксаторы захватного органа, исходное положение); на фиг.А - то же, в мо- мент фиксации кассеты; на фиг.5 - схема фиксации кассеты с внутренней отбортовкой; на фиг.6 - то же, с наружной отбортонкой.
Автооператор содержит каретку 1 с колесами 2, установленными на направляющих 3. Каретка 1 перемеща:ется по направляющим 3 приводом 4. Захватный орган имеет горизонтальную раму 5. На вертикальной раме 6 установлены ролики 7, расположенные в направляющих 8, жестко закрепленных на каретке 1. Перемещение захватного органа в вертикальной плоскости по направляющим 8 осуществляется приводом 9, соединенным посредством шарнира 10 с горизонтальной рамой 5. С внешней стороны вертикальной рамы 6 установтг лены ролики 11, выполненные с возможностью взаимодействия с ловителями 12.
В нижней части горизонтальной рамы 5 диагонально закреплены четыре подвижных фиксатора 13, соединенные шатунами 14 с диском 15, установлен- ным на валу привода 16 захватного органа .
Горизонтальное перемещение каретки 1 контролируется конечными выключателями 17 от упора-выступа 18, закрепленного на каретке 1, вертикальное перемещение - выключателями 19 от упора-выступа 20, расположенного на вертикальной раме 6, а поворот диска 15 -.конечным выключателем 21 от ку- лачка 22, закрепленного на валу привода 16.
Кассета 23 для захвата сверху снажена внутренней отбрртовкой 24, либо имеет наружную отбортовку 25.
Автооператор работает следующим образом.
Каретка 1 перемещается по направляющим 3 до тех пор, пока выступ 18
0
5
0 5 О
Q
5 Q
с
5
не воздействует на конечный выключатель 17. Положение конечного выключателя 17 выбирается таким образом, чтобы при остановке автооператора его захватный орган находился над кассетой 23, подлежащей транспортировке, а ролики 11 - под пазами неподвижных ловителей 12. Конечные выключатели 17 и ловители 12 находятся на каждой позиции загрузки, обработки и выгрузки кассет 23 с изделиями. Затем захватные орган под воздействием привода 9 опускается. При его движении вниз ролики 11 проходят через пазы неподвижных ловителей 12, за счет чего происходит смещение в ту или иную сторону каретки 1, компенсирующее неизбежную погрешность позиционирования автооператора вследствие разброса точки срабатьшания конечного выключателя 17 и инерции привода 4.
Перемещение захватного органа вниз контролируется конечным выключателем 19 выступа 20, в результате чего фиксаторы 13 опускаются ниже отбор- товки 24 кассеты 23 (см.фиг.3 и 5). Затем включается привод 16 и проис ходит поворот на 90 диска 15, который с помощью шатунов 14 осуществляет подвод фиксаторов 13 под отбортовку 24 кассеты 23 (фиг.4 и 5). Величина поворота диска 15 контролируется выключателем 21 от кулачка 22. Захватный орган с зафиксированной кассетой поднимается и автооператор перемещает кассету на требуемую позицию обработки, загрузки или выгрузки.
Формула изобретения
Автооператор, содержащий приводную горизонтальную каретку, располо женную в направляющих, вертикальную - раму, связанную с кареткой, и захватный орган, связанный с вертикальной рамой и с приводом, отличающийся тем, что, с целью повышения надежности работы с деталями типа кассет, имеющих сверху отбортовку, путем подхватьшания их снизу за отбортовку, захватный орган выполнен в виде горизонтальной рамы с диагонально расположенными фиксаторами, шарнирно связанными посредством шатунов с диском, который кинематически связан с приводом захватного органа.
Г7 18 fl-ft
12 I
,5 f
-f
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1976 |
|
SU554993A1 |
| Автооператор | 1977 |
|
SU707767A2 |
| Установка для электрохимической обработки деталей | 1978 |
|
SU730886A1 |
| Автооператор для гальванических линий | 1984 |
|
SU1178806A1 |
| ПРЕСС ДЛЯ СОЕДИНЕНИЯ ШИН С ТОКОВОДАМИ | 1971 |
|
SU304150A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Автооператор линий гальванической и химической обработки | 1985 |
|
SU1306986A1 |
| Гибкая автоматическая гальваническая линия | 1991 |
|
SU1787177A3 |
| Автооператор | 1984 |
|
SU1296399A1 |
| Автоматическая линия для нанесения гальванических покрытий | 1989 |
|
SU1696612A1 |
Изобретение относится к машиностроению, а именно к автооператорам для автоматизации технологических процессов. Цель изобретения - повышение надежности работы с деталями типа кассет, именщих сверху отбор- товку, путем подхватьшания их снизу за отбортовку. При перемещении захватного органа автооператора вниз относительно кассеты 23 включается привод поворота диска,- в результате чего фиксаторы 13 оказываются под отбортовкой 24 кассеты 23. Далее захватный орган подхватывает кассету и автооператЬр перемещает ее на требуемую позицию обработки, загрузки или выгрузки. 6 ил.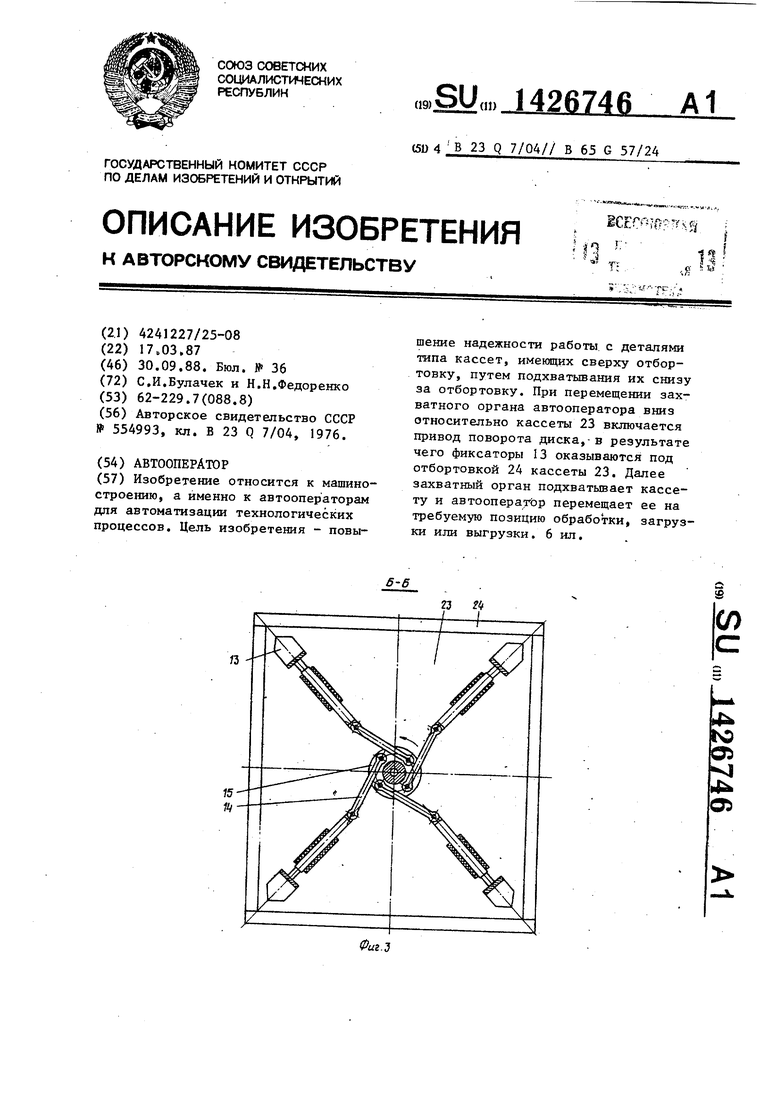
i
;
/ 23
(./
gtfg/
a. -/г.г
f3
CDi/г. 5
Щ
, В
Фиг.Ч
f
23
V
25
| Автооператор | 1976 |
|
SU554993A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
