(54) АВТООПЕРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1977 |
|
SU707767A2 |
| Установка для электрохимической обработки деталей | 1978 |
|
SU730886A1 |
| Автооператор | 1987 |
|
SU1426746A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Автооператор | 1986 |
|
SU1364430A1 |
| Устройство для перемещения изделий | 1987 |
|
SU1495055A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство Кривовязюка для отделения нижнего листа от стопы | 1980 |
|
SU937088A1 |
| Автомат для загрузки деталей на каретку автооператорной линии | 1977 |
|
SU708000A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
1
Изобретение относится к машиностроению, а именно к авто операторам для автоматизации технологических процессов.
Известен автооператор для перемещения кассет с изделиями, в котором содержится перемещающаяся по направляющим каретка несушая захватный орган с приводом l ,
Недостатком указанного автооператора является сложность перемещения на значительные расстояния и установки кассет с изделиями в ванны для дальнейшей обработки.
Наиболее близок к изобретению по техническому решению автооператор, в котором возвратно-поступательное движение производится при помрщи каретки, перемещающейся вдоль обслуживаемых станков, и несущей захватный орган с приводом f2 ,
Однако и этот автооператор не обеспечивает установки кассет с изделиями в ванны, например, для электрохимической обработки, так как при установке кассет необходимо осуществлять захват изделий сверху, это ограничивает технологические возможности авто оператора.
Цель изобретения - обеспечение установки кассет с изделиями в ванны, т.е. расширение технологических возможностей автооператора.
Для этого в предлагаемом автооператоре захватный орган вьгаолнен в виде двух горизонтальных рам, одна из которых жестко закреплена на корпусе каретки к снабжена пазами под изделие, а вторая подпружинена относительно первой и несет Г-образные планки, размещенные против этих пазов.
Предлагаемый автооператор обеспечивает захват изделий сверху, что позволяет
автоматизировать технологический процесс производства деталей, проходящих обработку в ваннах и кассетах.
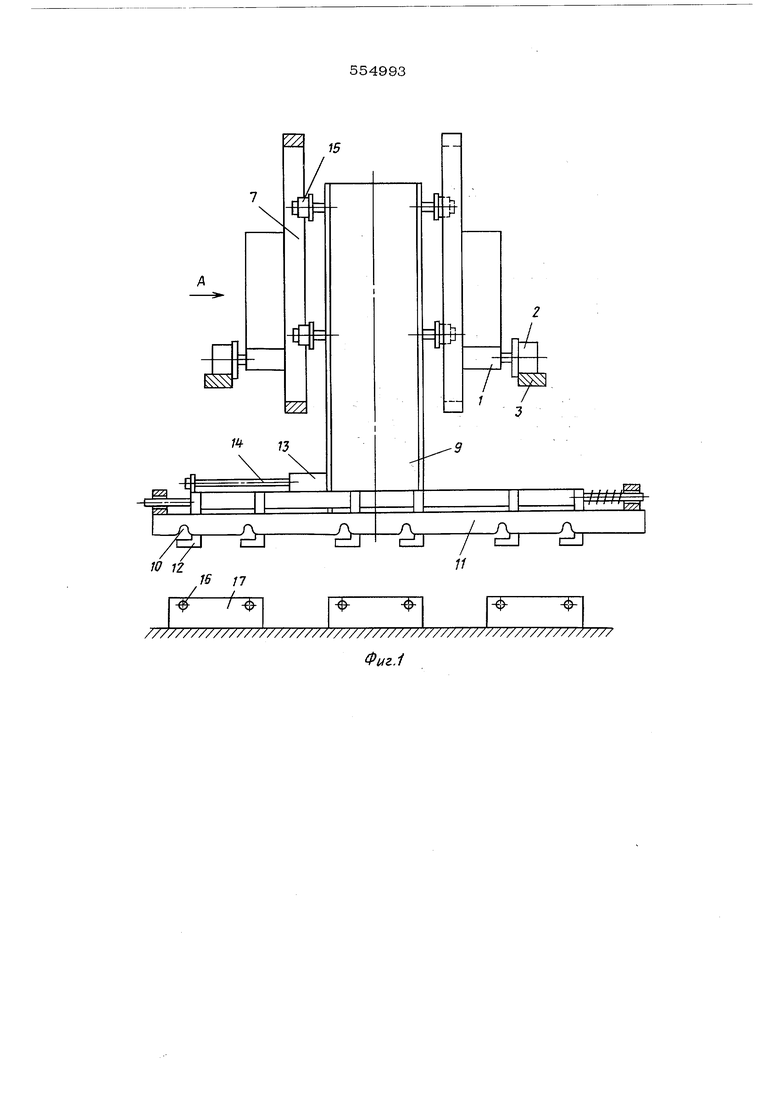
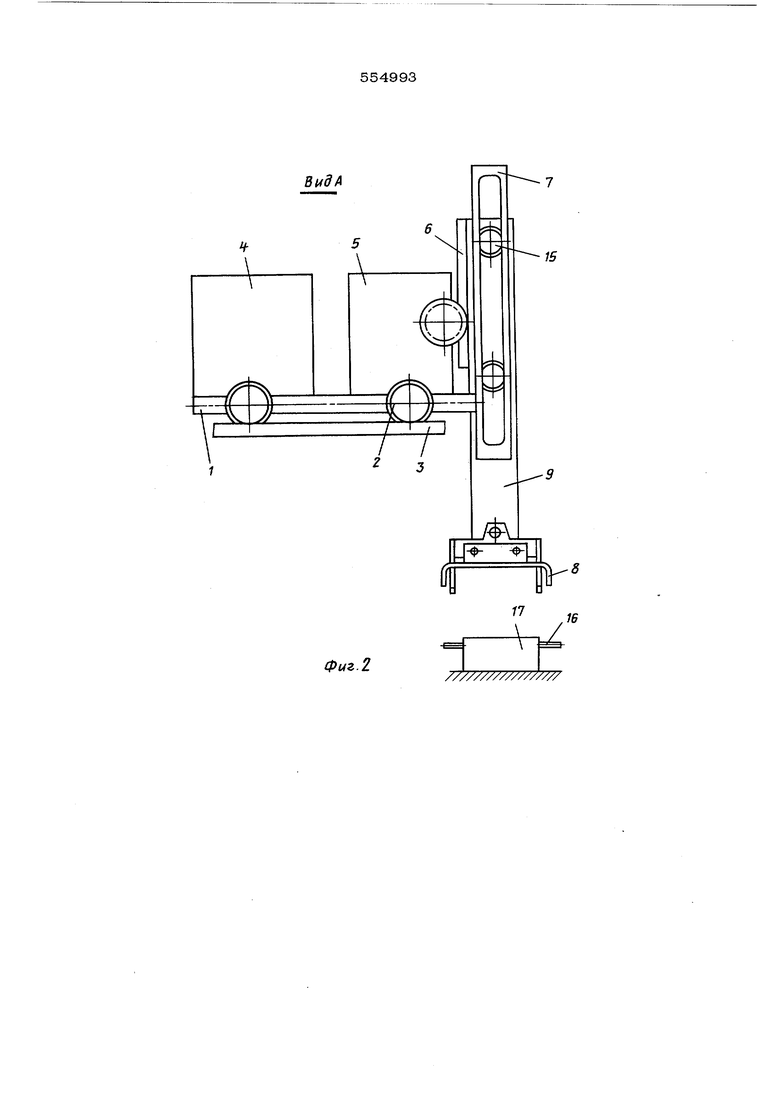
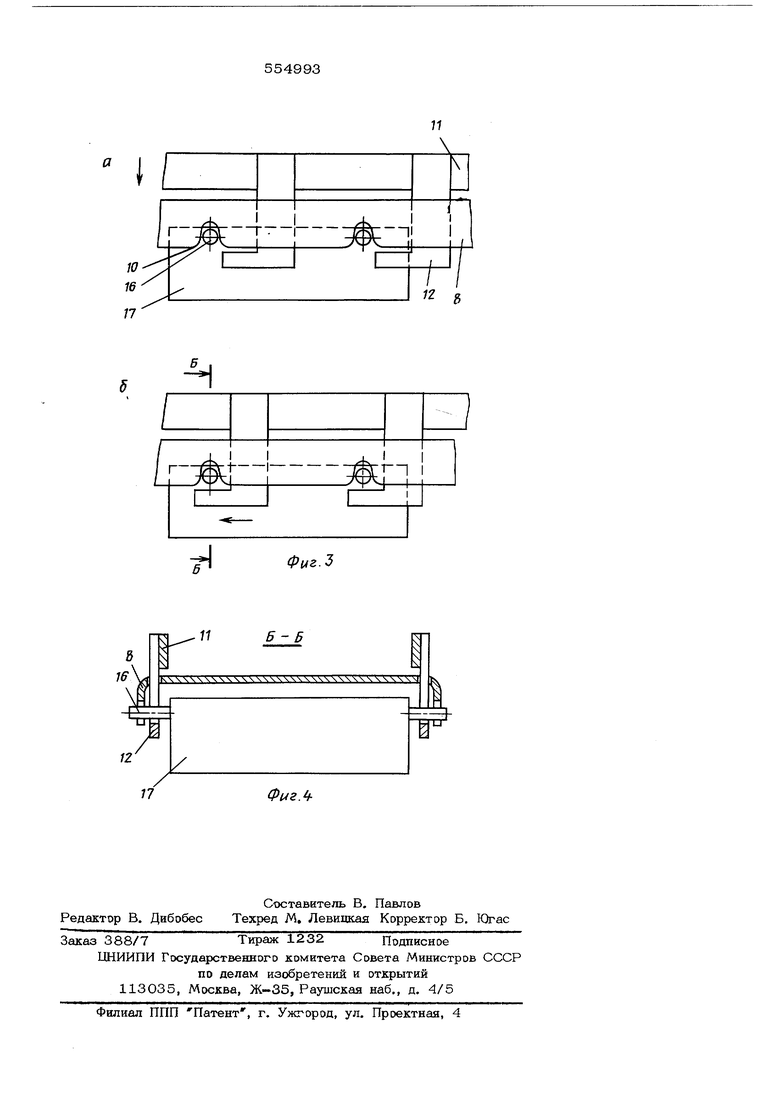
На фиг, 1 изображен описываемый автооператор общий вид; на фиг, 2 - вид по
стрелке А на фиг, 1; на фиг. 3 - захватный орган; на фиг. 4 - разрез Б-Б нафиг.З.
Авто оператор содержит каретку 1 с колесатци 2, установленными в направляющих3. Каретка. 1 перемешается по направляющим
3 приводом 4. Захватный орган перемещается от привода 5 с помощью зубчато-реечной передачи б по вертикальным направляющим Захватный орган выполнен в виде двух горизонтальных рам, одна из которых, рама 8, жестко закреплена на корпусе каретки 9 и снабжена пазами Ю, а вторая рама 11 подпружинена относительно первой и несет Г-образные планки 12, размещенные против пазов 1О. Привод захватного органа вьгаолнен в виде тягового электромагнита 13, закрепленного на корпусе каретки 9 и связанного с рамой 11 при помощи тяги 14. Каретка 9 соединена с кареткой 1 колесами 15. Штыри 16 жестко закреплены на кассетах 17.
В исходном положении Г-образные планки 12 рамы 11 расположены против пазов 10, Каретка 1 автооператора находится в произвольном положении. При поступлении команды привод 4 перемещает каретку 1 в заданное положение кассет 17, при этом пазы 10 располагаются над штьфями 16.
Затем привод 5 с помощью зубчато-реечной передачи 6 перемешает каретку 9 вниз, включается электромагнит 13 н че- рез тягу 14 перемещает раму 11, а вместе с ней и Г-образные планки 12 вправо, открывая пазы 10, которые опускаются на щтьфи 16 кассет 17, электромагнит обесточивается, под действием пружины рама
11возвращается в исходное положение и Г-образные планки перекрывают пазы 10, фиксируя щтыри 16. (фиг. За,б). После перемещения кассет 17 в ванну включается электромагнит 13, Г-образные планки
12освобождают пазы 10 и каретка 9 поднимается вверх.
Формула изобретения
Автооператор, например, для переноса кассет с изделиями, содержащий каретку, захватный орган и приводы, отличающийся тем, что, с целью расширения технологических возможностей, захватный орган вьгаолнен в виде двух горизонтальных рам, одна из которых жестко закреплена на корпусе каретки и снабжена пазами под изделия,, а вторая подпружинена относительно первой и несет Г-образные планки, размещенные против этих пазов.
Источники информации, принятые во внимание при экспертизе:
№ 428917, М.кл.В 23 Q 7/04, 1972.
75
Фиг. 2
|-ф- -Ф-
Ч 1
8
П
16
//////////////////
Б- Б
6
12
/
