2. Автооператор по п.1, отличающийся тем, что механизм круговых колебаний выполнен в виде диска, закрепленного на валу двигателя, двух подпружиненных электромагнитных фиксаторов и подпружиненного ролика, закрепленных с нижней стороны диска с возможностью взаи. модействия с верхней поверхностью диска , причем диск- закреплен в двух диаметральных точках на кольце.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| Автооператор | 1987 |
|
SU1426746A1 |
| Устройство для транспортирования грузов | 1984 |
|
SU1265127A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| Автооператор для гальванических линий | 1980 |
|
SU952704A1 |
| Автооператор для гальванических линий | 1988 |
|
SU1537714A1 |
| Автооператор для гальванических линий | 1981 |
|
SU947232A1 |
| Автооператорная гальваническая линия | 1988 |
|
SU1516515A1 |
| Автоматическая линия для нанесения гальванопокрытий | 1991 |
|
SU1781330A1 |
1. АБТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИЙ, содержащий корпус, го i5 механизм горизонтального перемещения, механизм вертикального перемещения и каретки с захватным устройством, отличающийся тем, что, с целью повышения производительности автооператора путем сокращения времени стекания раствора, захватное устройство вьшолнено в виде кольца и размещенного внутри него механизма круговых колебаний, при этом кольцо захватного устройства закреплено в двух диаметральных точках. / J 5S (Я 00 00о Од
1
Изобретение относится к устройствам для нанесения гальванических покрытий.
Целью изобретения является повышение производительности автооператора путем сокращения времени стекания раствора.
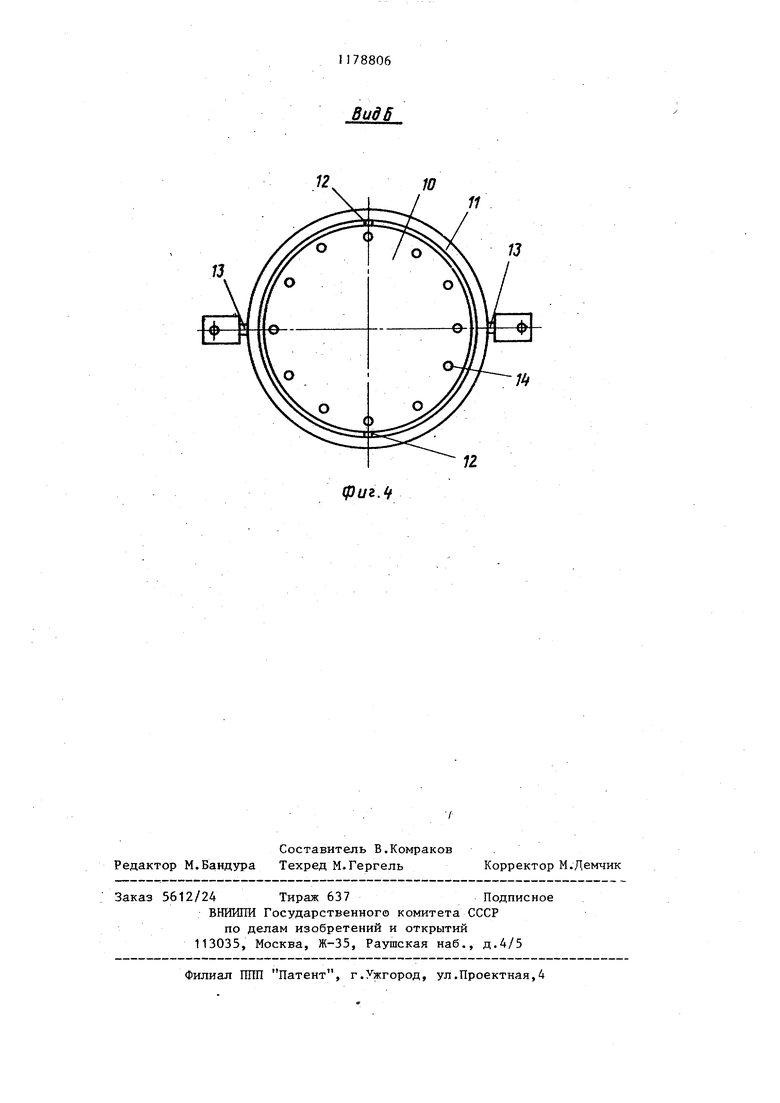
На фиг. 1 изображен автооператор, общий вид; на фиг. 2 - захватное устройство; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - механизм захвата, вид Б на фиг. 2.
Автооператор содержит механизм 1 горизонтального перемещения, механизм 2 вертикального перемещения, каретку 3 . для горизонтального перемещения и каретку 4 для вертикального перемещения.
Каретка 3 перемещается по каткам5, которые вращаются от электродвигателя постоянного тока механизма горизонтального перемещения. На каретке 3 установлена каретка 4, которая перемещается по каретке 3 от электродвигателя переменного тока механизма вертикального перемещения На каретке 4 установлено захватное устройство 6. Оно содержит корпус 7, в котором расположены механизм 8 захвата и механизм 9 круговых колебательных движений.
Механизм захвата представляет собой диск 10, находящийся внутри кольца 11, кольцо закреплено в корпусе в двух точках, а диск закреплен в кольце в двух точках, причем точки закрепления диска и кольца разнесены на . Диск крепится в точках 12, а кольцо - в точках 13. Такое закрепление диска и кольца обеспечивает им возможность свободных колебательных движений в вертикальной плоскости. На нижней стороне диска 10 закреплены крючки 14 для подвесок с деталями.
Механизм круг.овых колебательных движений содержит диск 15, закрепленньй на валу 16 электродвигателя 17. На нижней стороне диска 15 по его периферии разнесены на равном расстоянии два подпружиненных электромагнитных фиксатора 18 и подпружиненньм ролик 19. Фиксаторы и ролик поджаты к верхней поверхности диска 10 механизма захвата и удерживают ег в горизонтальном положении.
Автооператор работает следующим образом. I
На загрузочной позиции к крючкам
14 диска 10 крепят подвески с деталями. По команде, в соответствие с заданной технологической программой на гальванический процесс, включают электродвигатель механизма вертикального перемещения. Каретка 4 вместе с захватным устройством перемещается в верхнее положение. Затем включают электродвигатель механизма горизонтального перемещения и каретка 3 по каткам 5 перемещается вдоль гальванической линии 20 над ванными 21 до заданной позиции. Над заданной позицией включают электродвигатель механизма вертикального перемещения. Каретка 4 с захватным устройством и деталями перемещается в нижнее положение. Оставив на ловителях технологической позиции подвески с деталями, каретка 4 с захватным устройством в нижнем положении перемещается к следующей позиции по команде от электродвигателя механизма горизонтального перемещения. На этой позиции механизм захвата подхватывает другие подвески с деталями. При этом диск 10.механизма захвата находится в горизонтальном положении изза равномерного поджатия его фиксато рами 18 и роликом 19.
31
По поступлении очередной команды на электродвигатель механизма вертикального подъема каретка 4 с захватным устройством поднимается вверх. .Одновременно электромагнитные фиксаторы 18 утапливаются, включают электродвигатель 17, с вращением которого начинает вращаться диск 15, а с ним и ролик 19. Отжимной ролик 19 под действием пружины сжимает диск 10 с подвесками на установленный угол вниз и совершает круговой обка по диску 10. Таким образом, при подъеме каретки 4 с захватным устройством диск 10 механизма захвата от взаимодействия с роликом 19 механизма круговых колебательных движений постоянно меняет уклон по окружности. В верхнем положении элек64
тродзигатель 17 отключают, фиксаторы 18 возвращаются в исходное положение, диск 10 занимает горизонтальное положение.
Далее работа автооператора повторяет описанньй цикл.
При использовании механизма круговых колебательных движений в автооператорах сокращается время выдержки для стеканин раствора с деталей в результате разносторонних круговых колебаний диска механизма захвата; уменьшается унос раствора из основных
гальванических ванн; увеличивается процент выхода годных изделий и производительность автооператора; время вьвдержки для стекания раствора с деталей уменьшается на 20%.
фиг.
Видб
11
13
lit
12
| Автооператор для гальванических линий | 1978 |
|
SU724410A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Автооператор для гальванических линий | 1980 |
|
SU927680A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
