Изобретение относится к общему машиностроению, а именно к автооператорам, предназначенным для обслуживания технологического оборудования.
Цель изобретения - повышение не- сущей способности автооператора путем автоматической стыковки механизма вьщвижения рабочего органа с его приводом, неподвижно размещенным на основании.
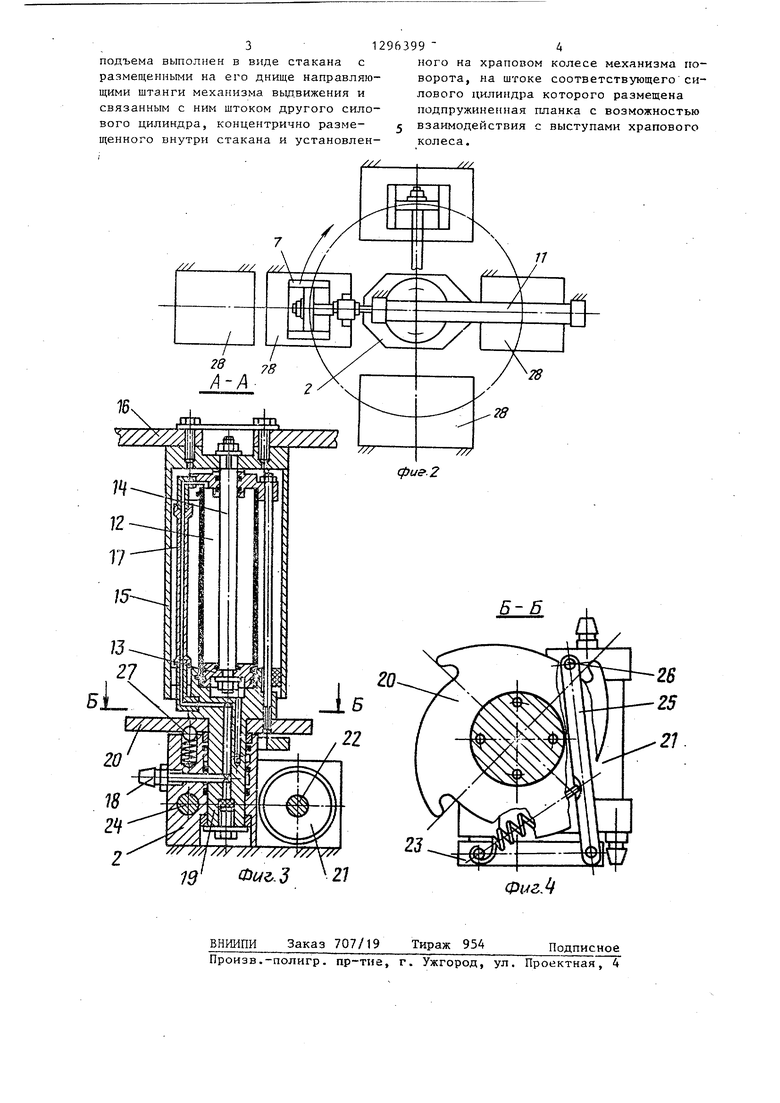
На фиг. 1 изображен автооператор, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1i на фиг. А - разрез Б-Б на фиг. 3.
Автооператор состоит из закрепленного на основании 1 корпуса 2, на котором закреплены механизмы поворота 3 и подъема 4. В верхней части механизма 4 подъема в направляю- щих 5 установлена штанга 6 механизма выдвижения рабочего орг ана, например кассеты 7 с деталями.
На конце штанги 6 закреплен палец 8 для взаимодействия с ловите- лем 9, закрепленным на штоке 10 си-т лового цилиндра 11 привода механизма выдвижения, установленного на основании 1,
. Механизм 4 подъема вьшолнен в ни- де силового цилиндра 12 с поршнем 13 и штоком 14, связанным со стаканом 15, к днищу которого крепится кронштейн 16 с направляющими 5. Внутри стакана 15 расположен воздуховод 17, соединяющий верхнюю полость цилиндра 12 через штуцер 18, закрепленный в неподвижном корпусе 2, с пневмосис- темой.
Механизм 3 поворота автооператора выполнен в виде плунжера 19, расположенного в корпусе 2 и жестко связанного с храповым колесом 20. Пнев- моцилиндр 21 закреплен в корпусе 2, его шток 22 связан с кареткой 23, которая связана с направляющей 24, проходящей в корпусе 2.
Каретка 23 снабжена подпружиненной планкой 23, которая имеет ролик 26, взаимбдействующий с храповым колесом 20. Каждое прложение автооператора при повороте выполнено фиксируемым с помощью.фиксатора 27.
Автооператор работает следующим образом.
В верхнем положении штанги 6 ловитель 9 взаимодействует с пальцем 8. При включении привода 11 ловитель 9
взаимодействует с пальцем 8, перемещает штангу 6 вправо - в положение, определенное положением технологичес кой ванны 28 (положение показано основной линией). После этого с помощью механизма 4 подъема происходит опускание кассеты 7, закрепленной на штанге 6, в технологическую ванну 28.
По окончании техпроцесса в ванне 28, кассета 7 поднимается до исходного положения. Затем происходит поворот штанги 6 с помощью механизма 3 поворота путем подачи давления в пнев- моцилиндр 21. В этом случае каретка 23, закрепленная на штоке 22, перемещает подпружиненную планку 25, роликом 26 входит в зацепление с выступом храпового колеса 20 и проворачивает его на угол 90°.
Затем происходит опускание кассеты 7 в новую ванну 28 с последующим подъемом и после этого происходит последующий поворот штанги 6. Таким образом, цикл возобновляется. После завершения кругового перемещения штанга 6 с кассетой 7 возвращается в исходное положение. В результате этого палец 8 входит в зону ловителя 9 и пневмоцилиндр 11 при взаимодействии со штангой 6 перемещает кассету 7 в крайнее левое положение. После этого кассету 7 с деталями снимают и закрепляют новую, и цикл возобновляется.
Формула изобретения
1. Автооператор, содержащий осно- вание, размещенные на нем и последовательно связанные друг с другом механизмы поворота, подъема и выдвижения рабочего органа и приводы, выполненные в виде Силовых цилиндров, причем механизм выдвижения вьшолнен в виде размещенной в направляющих штанги с установленным на ней рабочим органом, отличающийся тем, ч Г о, с целью повьш1ения несущей способности, он снабжен ловителем и пальцем, установленным на штанге механизма вьщвижения, а ловитель установлен на штоке силового цилиндра, размещенного на основании с возможностью взаимодействия ловителя с пальцем в крайнем верхнем положении механизма выдвижения.
2. Автооператор по п. 1, о т л и- ча.ющийся тем, что механизм
подъема выполнен в виде стакана с размещеРП1ьгми на его днище направляющими штанги механизма выд.вижения и связанным с ним штоком другого силового цилиндра, концентрично размещенного внутри стакана и установленного на храповом колесе механизма поворота, на штоке соответствующего силового цилиндра которого размещена подпружиненная планка с возможностью взаимодействия с выступами храпового
Фиг.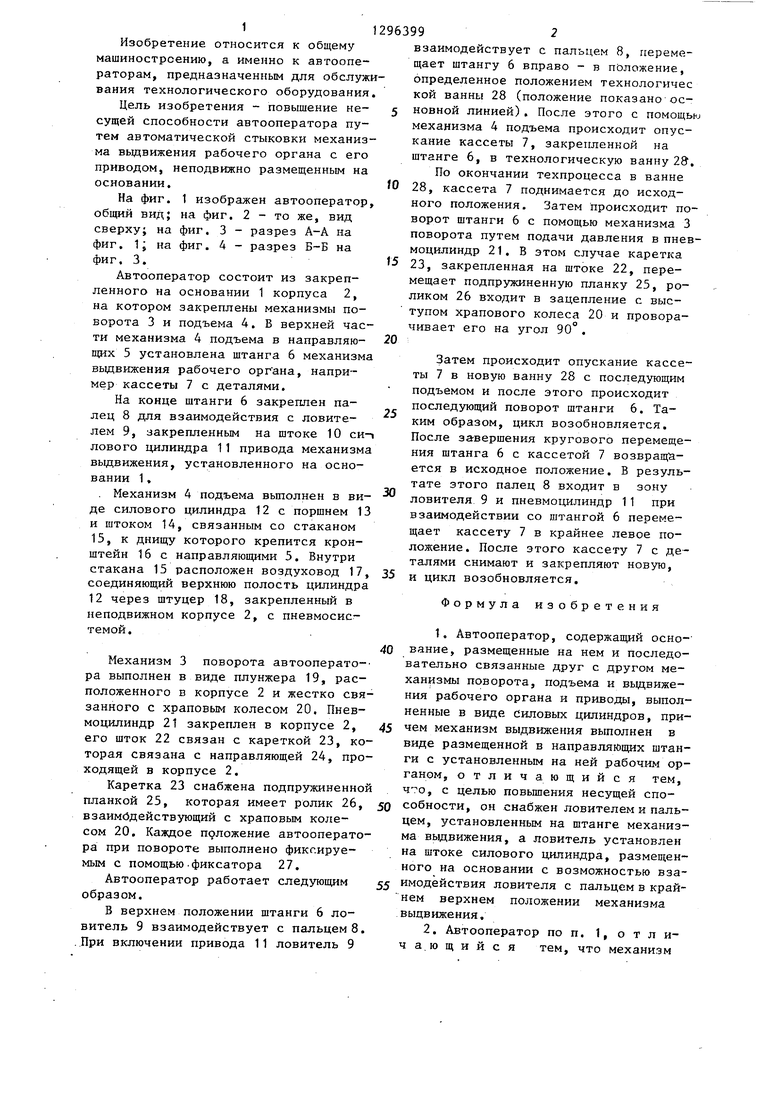
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи заготовок | 1987 |
|
SU1648729A1 |
| Линия для химического фрезерования крупногабаритных изделий | 1987 |
|
SU1497278A1 |
| Загрузочное устройство | 1987 |
|
SU1437184A1 |
| Автоматическая линия для металлизации плоских деталей | 1987 |
|
SU1507883A1 |
| Реверсивный храповой механизм | 1988 |
|
SU1634887A1 |
| Автоматическая линия для нанесения гальванических покрытий | 1989 |
|
SU1696612A1 |
| Устройство для маркировки этикеток | 1991 |
|
SU1781135A1 |
| Устройство для подачи заготовок в зону обработки | 1986 |
|
SU1398961A1 |
| Устройство для загрузки плоских изделий, преимущественно выводных рамок интегральных схем | 1987 |
|
SU1499540A1 |
| Автомат для сборки | 1987 |
|
SU1428561A2 |
Изобретение относится к области машиностроения, а именно к автооператорам, предназначенным для обслуживания технологического оборудования. Целью изобретения является повышение несущей способности автооператора путем автоматической стыковки механизма 6 выдвижения с его приводом, вьтолненным в виде пневмоцилинд- ра 11, неподвижно размещенным на основании 1. Процесс стыковки осуществляется при подъеме от механизма 4 или повороте от механизма 3 штанги 6, палец 8 которой входит в ловитель 9 пневмоцилиндра 11 для последующего выдвижения кассеты 7. 1 з.п. ф-лы, 4 шт. ю со а: оо со со фи.1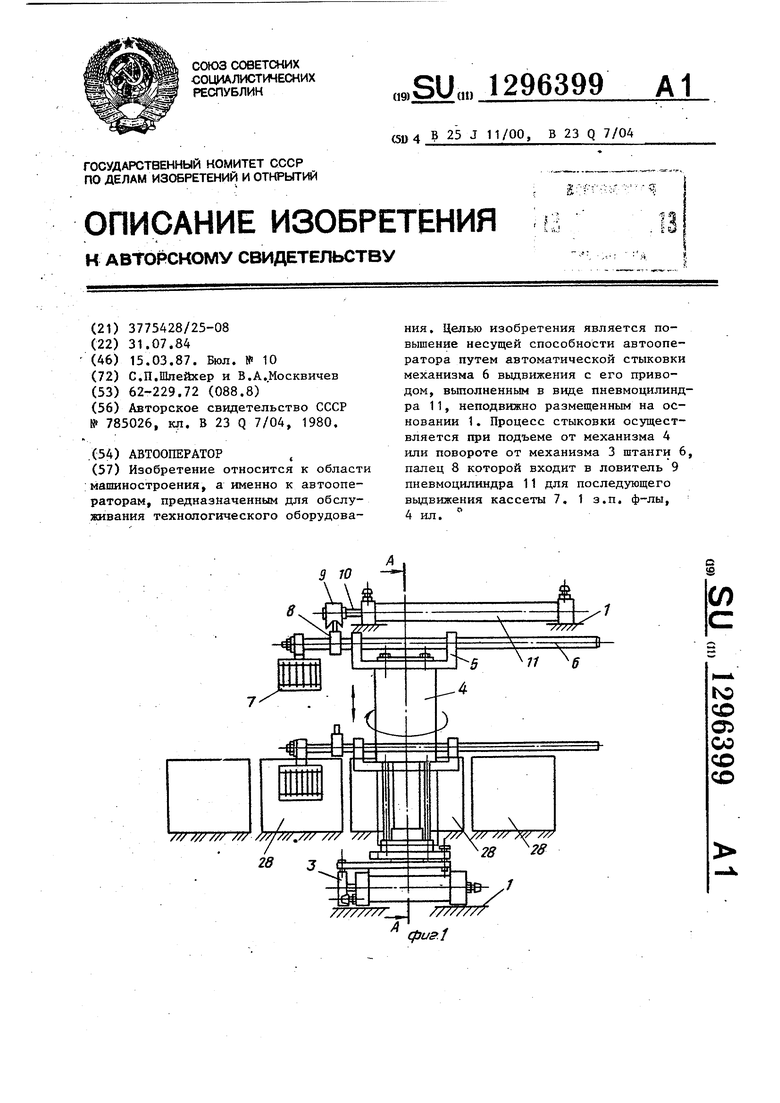
вниипи
Заказ 707/19 Тираж 954
Произв.-полигр. пр-тне, г. Ужгород, ул. Проектная, 4
Подписное
| Манипулятор | 1979 |
|
SU785026A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| ,(54) АВТООПЕРАТОР | |||
