гируя рабочее положение грутозахватов 15. И верхнем положении грузовой тра- персы 3 отклк чается привод подъема и ркиюмается привод иеремеи вния авто- onepaTcjpa на чадаиную позицию. Благодаря тому, что захватные органы имеют возможность поворачиваться в
1
Изобретение относится к нанесению гальванических и химических покрытий на детали и изделия и может быть применено в автооператорах портального типа для перемещения изделий от од- ной технологической ванны к другой, преимущественно, оснащенных глухими крыи1ками, укрывающими зеркало ванн.
Цель изобретения - упрощение конструкции и повышение надежности ра- боты путем обеспечения фиксации захватов ,
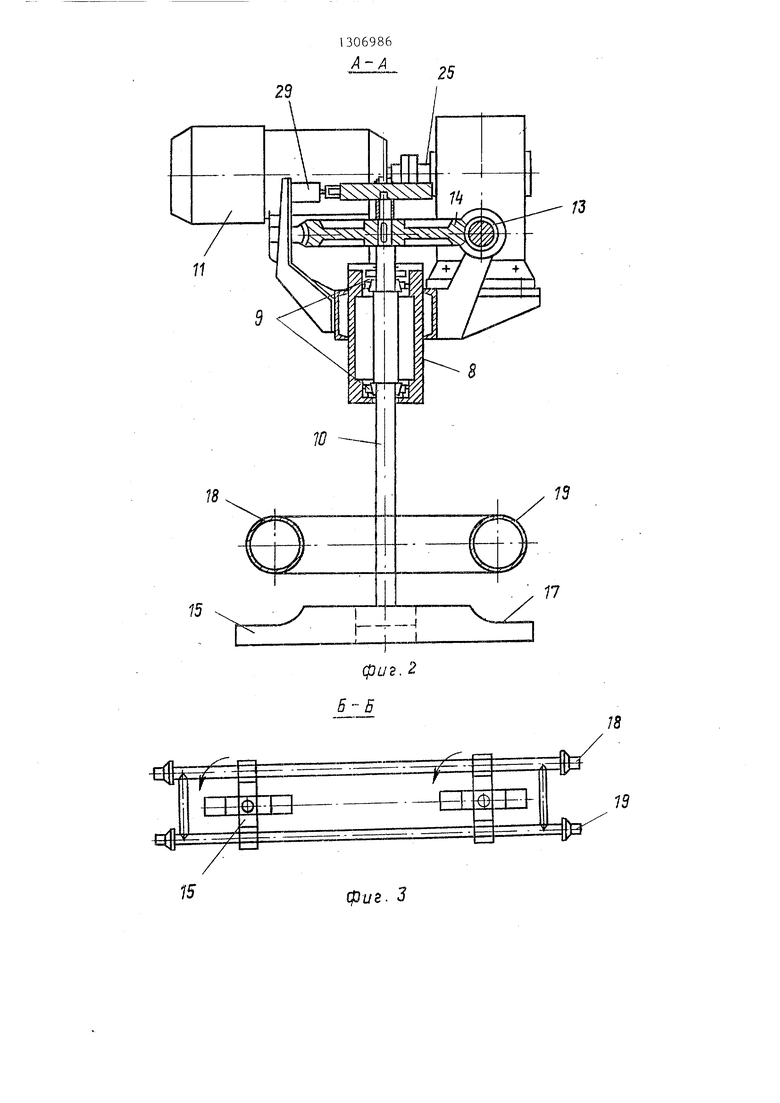
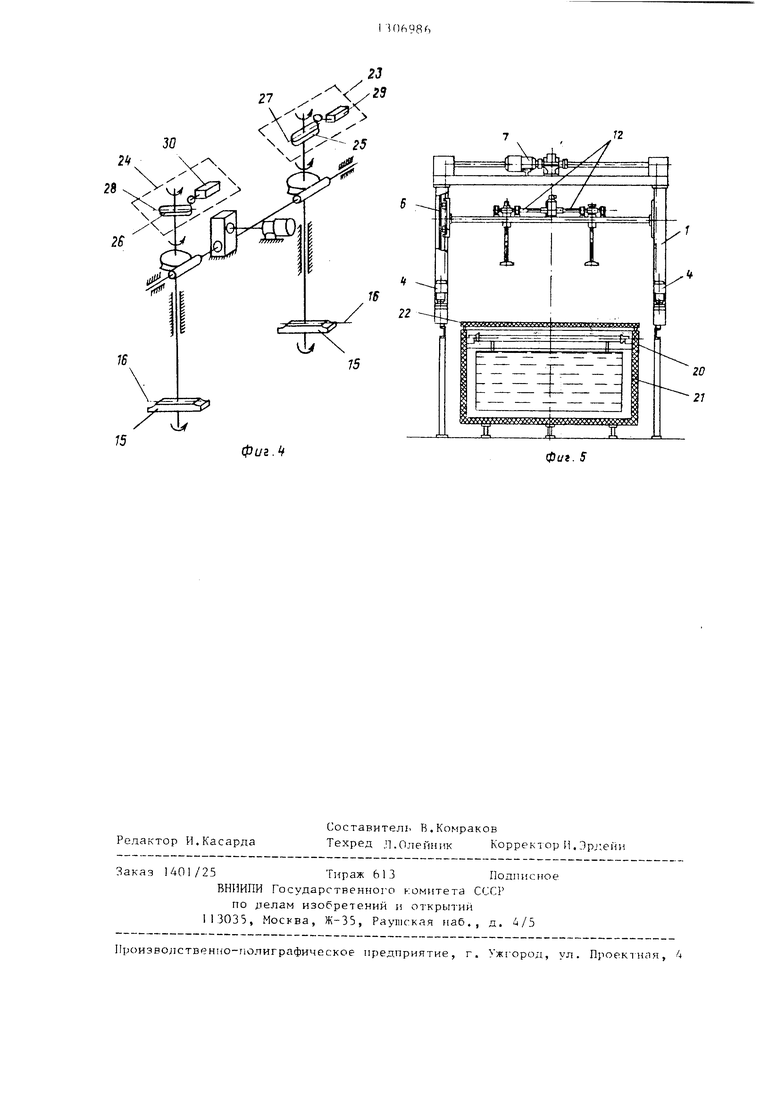
На фи1-,1 показан автооператор, вид спереди, крыщка ванны открыта; на фиг.2 - сечение А-А на фиг,1; на фиг.З - сечение Б-р; на фиг.1; на фиг,А - кинематическая схема механизма поворота захватов; на фиг. 5 - автс)Оператор, вид спереди, крьш1ка ванны закрыта.
Автооператор линии гальванической и химической обработки состоит из корпуса 1, выполненного в виде портала, установленного на катки 2 можностью перемещения его по рельс.о вым путям 3 с помощью привода 4 горизонтального перемеи1ения, грузовой подъемной траверсы 5, установленной с возможностью ее перемещения по вертикальным направляющим 6 с помощью привода 7,
На грузовой траверсе жестко закреплены два вертикальных полых корпуса Ь, в которых в подшипниковь х узлах 9 установлены соответственно два вер- тикальных вала 10 с возможностью синхронного их вращения от одного общего привода 11, установленного на грузовой траверсе 5 и связанного с вертикальными валами И) приводным валом 12 посредством двух червяков 3 и червячных колес 14,
с в о 3
горизонтал1.. плО1:кос. | И вместе с фиксаторами, длинные оси которь х расположены под прямым углом, обеспечивается надежны захват спаренн.ых пгганг и гарантированное рабочее и холостое положения захватов. Исключаются аварийные ситуации. 3 ил.
В нижней части вертикальных валов 10 размещены захватные органы 15, расположенные параллельно между собой и вытянутые вдоль динных своих осей 16, Захваты выполнены с ложементами 17 для обеспечения взаимодействия со спаренными в горизонтальной плоскости щтангами 18 и 19, которые устанавливаются на ловителях 20 внутри ванн 21, укрытых по бортам глухими крьш1- ками 22,
В верхней части вертикальных валов 10 установлены фиксаторы 23 и 24 для фиксирования соответственно рабочего и холостого положений захватных органов 15, выполненные в виде кулачков 25 и 26, симметрично расположенных относительно оси вертикального вала 10 и вытянутых вдоль длинных их осей 27 и 28 с возможностью взаимодействия с конечными выключателями 29 и 30. При этом длинная ось 27 кулачка 25 расположена перпендикулярно длинным осям 16 захватных орг а- нов, а длинная ось 2В кулачков 26 расположена параллельно им. Таким образом, длинные оси 27 и 28 кулачков 25 и 26 расположены относительно одна другой под углом 90 .
Автооператор работает следующим образом,
Для осуществления операции Взять 11 тангу из ванны, портал 1 с помощью механизма 4 горизонтального перемещения подается по рельсовому пути 3 к требуемой ванне 21, При этом его грузовая траверса 5 находится в верхнем положении. Грузозахватные органы 15 развернуты параллельно спаренным штангам 18 и 19, При этом кулачок 26 находится во взаимодействии с конечным выключателем 30, фиксируя холостое положение захватов 15. Кулачок 25 разомкнут с конечным выключателем 29,
Открывается крьшка 22 ванны 21. Грузовая траверса 5 с помощью привода 7 опускается по направляющим 6 до тех пор, пока грузозахваты 15, пройдя между штангами 18 и 19, опускаются ниже их. Отключается привод 7 вертикального перемещения и включается привод 11, который сообщает враща
тельное движение через приводной вал 12, червяки 13 и червячные колеса 14 вертикальному валу 10, поворачивая его.
При повороте вала на 90° кулачок 26 выходит из взаимодействия с конечным выключателем 30, размыкая его. В этот момент кулачок 25 поворачивается и замыкает конечный выключатель 29. Одновременно грузозахваты 15 вместе с валом 10 поворачиваются в горизонтальной плоскости на 90 и занимают рабочее положение.
Привод 11 отключается. Включается привод 7 вертикального перемещения. Грузовая траверса 5 поднимается в верхнее положение. Грузозахваты 15, находясь в зафиксированном рабочем положении, надежно подхватывают спаренные штанги с изделиями и поднимают их, после чего крышка ванны закрывается. В верхнем положении грузовой траверсы отключается привод 7 подъема
и включается привод 4 горизонтального 35 положений захватов, выполненные в перемещения. Автооператор перемещается на заданную позицию.
Благодаря тому, что захватные органы имеют возможность поворачиваться
виде кулачков и конечных выключате лей, при этом длинные оси кулачков расположены под прямым углом относ тельно друг друга, а штанги спарен
в горизонтальной плоскости с фиксато-40 g горизонтальной плоскости.
0
5
5
0
рами, длинные оси кулачков которых расположены под углом 90 одна к Другой, обеспечиваются надежный захват спаренных штанг и гарантированное рабочее и холостое положения захватов, надежная работа автооператора, исключается возникновение аварийных ситуаций. При этом механизм поворота валов захватов имеет малое количество узлов и элементов, что делает конструкцию более простой и надежной.
Формула изобретения
Автооператор линии гальванической и химической обработки, содержащий корпус с опорными катками, рельсовый путь, грузовую траверсу с поворотными грузозахватами и механизмом поворота, вертикальные направляющие, штанги, механизмы горизонтального и вертикального перемещений, отличающийся тем, что, с целью упрощения конструкции и повьш1ения надежности работы путем обеспечения фиксации захватов, он снабжен двумя полыми корпусами, установленными на траверсе, внутри которых в подшипниковых узлах смонтированы вертикальные валы, в нижней части которых размещены захватные органы, выполненные с возможностью взаимодействия со штангами, а в верхней части расположены фиксаторы рабочего и холостого
положений захватов, выполненные в
виде кулачков и конечных выключателей, при этом длинные оси кулачков расположены под прямым углом относительно друг друга, а штанги спарены
g горизонтальной плоскости.
15
:306986
А-А
17
/5
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для гальванохимических линий | 1985 |
|
SU1330057A1 |
| Автооператор для гальванических и химических линий | 1981 |
|
SU981463A1 |
| Автооператорная гальваническая линия | 1984 |
|
SU1219680A2 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Автоматическая линия для гальванической и химической обработки деталей | 1985 |
|
SU1300042A1 |
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| Агрегат для химической подготовки поверхности | 1982 |
|
SU1168631A1 |
| Установка для гальванической обработки деталей | 1981 |
|
SU996527A1 |
| Устройство для перемещения вагонных тележек | 1989 |
|
SU1794735A1 |
| Гибкая автоматическая гальваническая линия | 1991 |
|
SU1787177A3 |
Изобретение относится к .области нанесения гальванических и химических покрытий на детали и может быть использовано в автооператорах портального типа для перемещения изделий по технологическим ваннам. Цель изобретения - упрощение конструкции и повышение надежности работы путем фиксации рабочего положения захватов. Автооператор выполнен в виде портала 1, установленного на катке 2 с возможное тью его перемещения по рельсам 3 при помощи механизма 4. При подходе к требуемой ванне 21 грузовая траверса 5 находится в верхнем положении, а грузозахватные органы 15 развернуты параллельно спаренным штангам. После чего грузо вая траверса 5, на которой закреплены два полых корпуса 8, опускается по направляюЕцим до положения грузозахватов 15 ниже уровня спаренных штанг. Привод вертикального перемещения отключается и включается привод 11, от которого синхронно поворачиваются валы, установленные в корпусах 8. При повороте их на 90 срабатывают конечные выключатели, фикю (Л со о О5 со 00 О5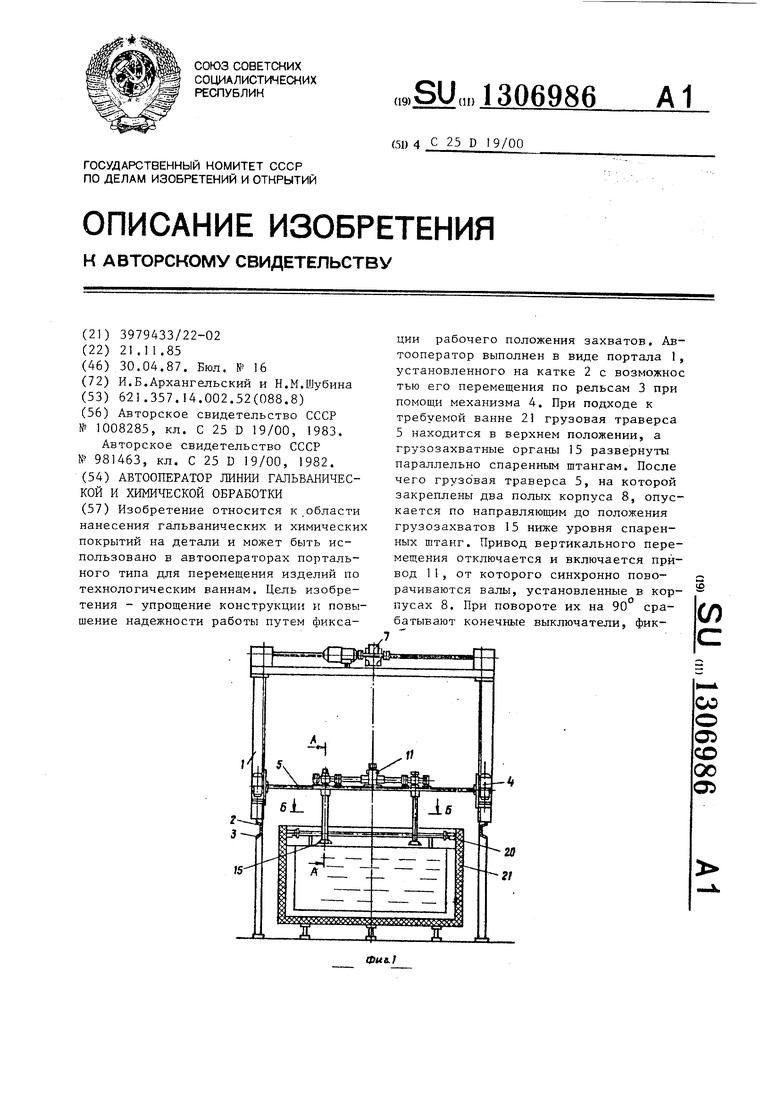
15
фиг- 3
27
фигЛ
фиг. 5
Редактор И.Касарда
Составитель В.Комраков
Техред Л.Олейник Корректор И,Эрлейи
Заказ 1401/25Тираж 613Подписное
ВНИИПИ Государственного р:омитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская иаб., д. ft / 5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проекпная,
| Автооператор | 1981 |
|
SU1008285A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Автооператор для гальванических и химических линий | 1981 |
|
SU981463A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
