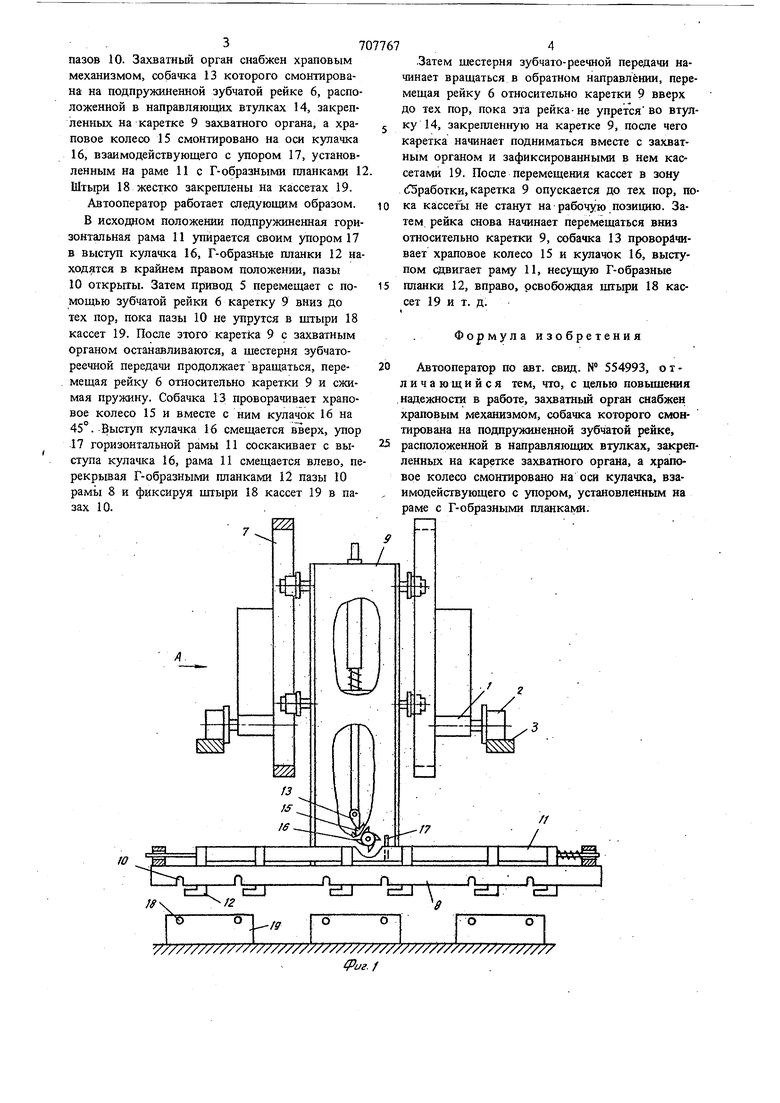
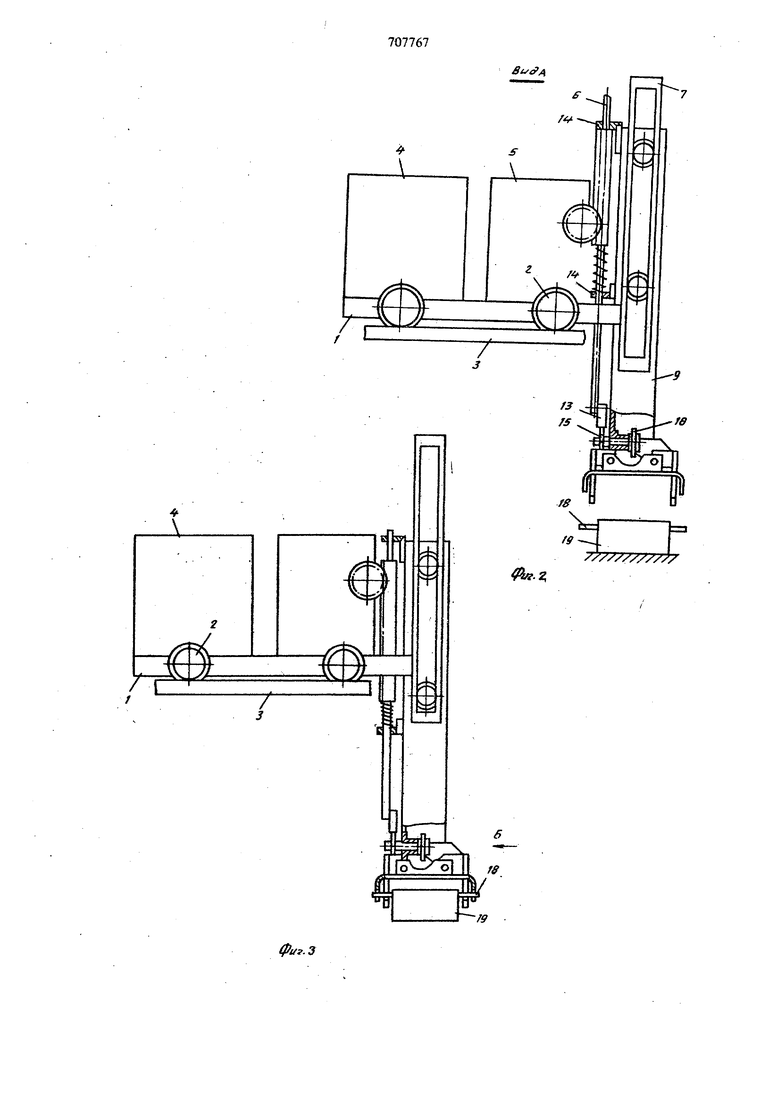
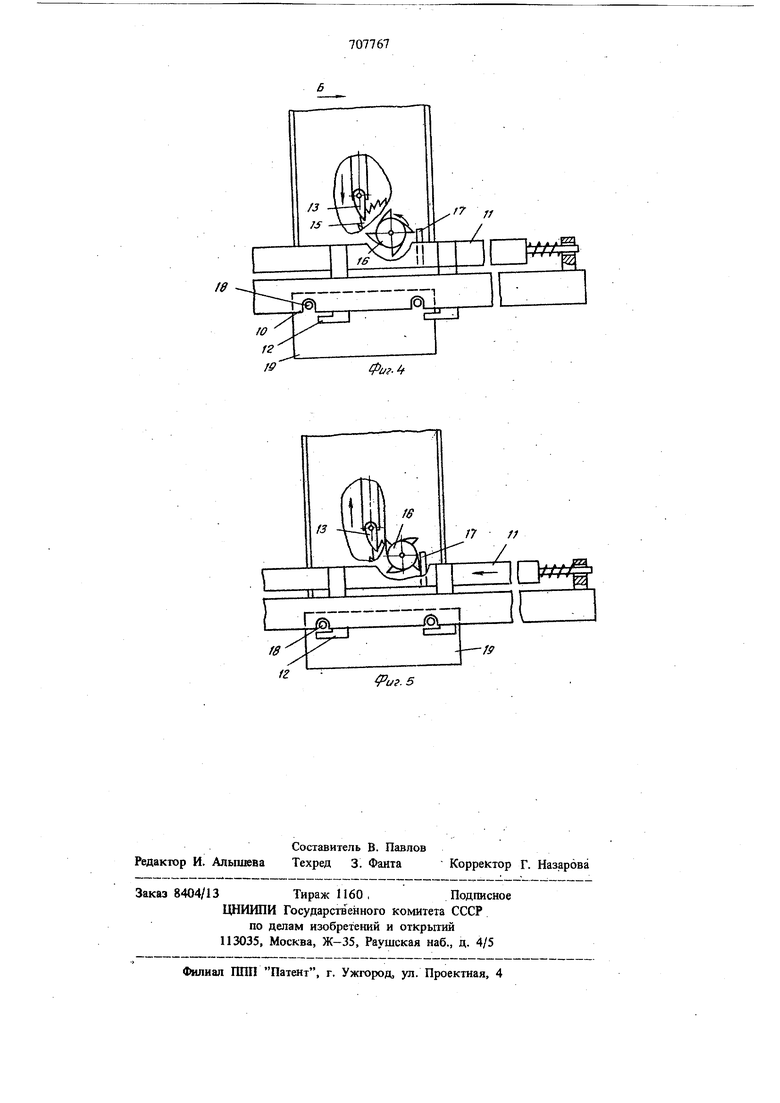
Изобретение относится к области машиностро ения, а именно к автооператорам для автомати зации технологических процессов производства деталей, находящихся в кассетах. По основному авт. свид. № 554993 известен автооператор, предназначенный для переноса ка сет с деталями, содержащий каретки, захватный ортан, выполненный в ввде двух горизонтальlibtx рам одна из которых жестко закреплена на корпусе каретки и снабжена пазами, а другая подпружинена относительно первой и несет Г-образные тшанки, размещенные против этих пазов, и привод. Однако выполнение привода в виде тяговоп электромагнита, закрепленного на корпусе каретки и связанного с рамой при помощи тяги, требует подачи напряжения на электромагнит в момент захвата кассет с помощью сложной логической системы, что усложняет управление и снижает надежность автооператора в работе. Целью изобретения является повышение надежности автооператора в работе. Это достигается тем, что захватный орган снабжен храповым механизмом, собачка которо го смонтирована на подпружиненной зубчатой рейке, расположенной в направляющих втулках, закрепленных на каретке захватного органа, а храповое колес смонтировано на оси кулачка, связанного с упором, установленным на раме с Г-образными планками. На фиг. i изображен автооператор, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - то же, в положении захвата кассеты; на фиг. 4 - вид по стрелке Б на фиг. 3; на фиг. 5 - то же, в положении захвата кассеты. Автооператор содержит каретку 1 с колесами 2, установленными в направляющих 3. Перемещение каретки 1 по направляющим 3 осуществляется приводом 4. Захватный орган перемещается от привода 5 при помощи зубчатореечной подачи (рейки) 6 по вертикальным направляющим 7. Захватный орган вьшолнен в виде двух расположенных горизонтально рам, одна из которых 8 жестко закреплена на корпусе каретки 9 и снабжена. пазами 10, а другая рама 11 подпр)окннена на каретке 9 и несет Г-образные планки 12, размещенные против
пазов 10. Захватный орган снабжен храповым механизмом, собачка 13 которого смонтирована на подпружиненной зубчатой рейке 6, расположенной в направляющих втулках 14, закрепленных На каретке 9 захватного органа, а храповое колесо 15 смонтировано на оси кулачка 16, взаимодействующего с упором 17, установленным на раме 11с Г-образными планками 12 Штьфи 18 жестко закреплены на кассетах 19.
Автооператор работает следующим образом. В исходном положении подпружиненная горизонтальная рама 11 упирается своим упором 17 в выступ кулачка 16, Г-образные планки 12 находятся в крайнем правом положении, пазы 10 открыты. Затем привод 5 перемещает с помощью зубчатой рейки 6 каретку 9 вниз до тех пор, пока пазы 10 не упрутся в штыри 18 кассет 19. После этого каретка 9 с захватным органом останавливаются, а шестерня зубчатореечной передаод продолжаетвращаться, перемещая рейку 6 относительно каретки 9 и сжимая пружину. Собачка 13 проворачивает храповое колесо 15 и вместе с ним кулачок 16 на 45°. Выступ кулачка 16 смещается вверх, упор 17 горизонтальной рамы 11 соскакивает с выступа кулачка 16, рама 11 смещается влево, перекрьтая Г-образными планками 12 пазы Ш рамь 8 и фиксируя щтыри 18 кассет 19 в пазах 10..
Y//7/7///// //////////////////////////////// /7777777
иг. /
.Затем шестерня зубчато-реечной передачи начинает вращаться в обратном направлении, перемещая рейку 6 относительно каретки 9 вверх до тех пор, пока эта рейка- не упрется во втулку 14, закрепленную на каретке 9, после чего каретка начинает подниматься вместе с захватным органом и зафиксированными в нем кассетами 19. После перемещения кассет в зону бЗработки, каретка 9 опускается до тех пор, пока ка ссеты не станут на рабочую позищпо. Затем рейка снова начинает перемещаться вниз относительно каретки 9, собачка 13 проворачивает храповое колесо 15 и кулачок 16, выступом сдвигает раму И, несущую Г-образные планки 12, вправо, рсвобождая шгыри 18 кассет 19 и т. д.
Формула изобретения
Автооператор по авт. свид. № 554993, отличающийся тем, что, с целью повышения надежности в работе, захватный орган снабжен храповым механизмом, собачка которого смонтирована на подпружиненной зубчатой рейке, расположенной в направляющих втулках, закрепленных на каретке захватного органа, а храповое колесо смонтировано на оси кулачка, взаимодействующего с упором, установленным на раме с Г-образными планками.
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Автооператор | 1976 |
|
SU554993A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU899210A1 |
| Автооператор | 1987 |
|
SU1426746A1 |
| Полуавтомат для сборки пластинчатых магнитопроводов трансформаторов | 1983 |
|
SU1176395A1 |
| Установка для электрохимической обработки деталей | 1978 |
|
SU730886A1 |
| Каретка кривовязюка к устройству дляВыРубКи зАгОТОВОК из пОлОСОВОгОМАТЕРиАлА | 1979 |
|
SU841732A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону штампа | 1983 |
|
SU1082530A1 |
иг.5
