Фиг. 2
.Изобретение относится к машиностроению, и может быть использовано при выполнении строительно-монтажных и погрузочно-разгрузочных работ, в самосвальных средствах различного назначения, а также в машинах для лесо разработки и трубоукладки.
Цель изобретения - понышение про.изводительности подъемного механизма
;путем обеспечения автомат1-1ческого выбора кинематических параметров в эа вйсимости от нагрузки.
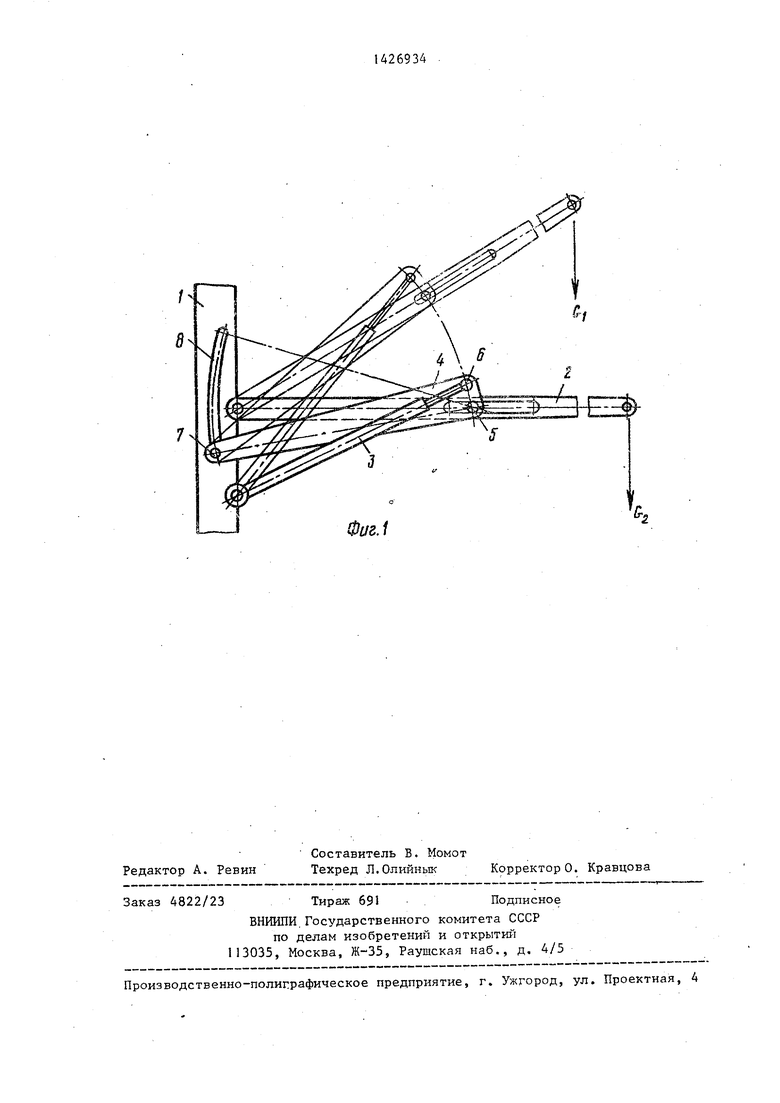
На фиг. 1 изображен подъемный меПусть предлагаемому механизму требуется преодолеть усилие G на крюке, величина которого меньше уошия, необходимого для поворота подкоса 4 вокруг ползуна 5 (фиг. 1). В этом случае цилиндр 3 сразу начинает поворачивать подкос 4 вокруг точки 7 и поднимать стрелу 2.
В том-же случае, если усилие G на крюке больше, чем усилие, необходимое для поворота подкоса 4 вокруг ползуна 5 (фиг.- 2), то цилиндр З поворачивает шарнир 6 подкоса 4 вокруг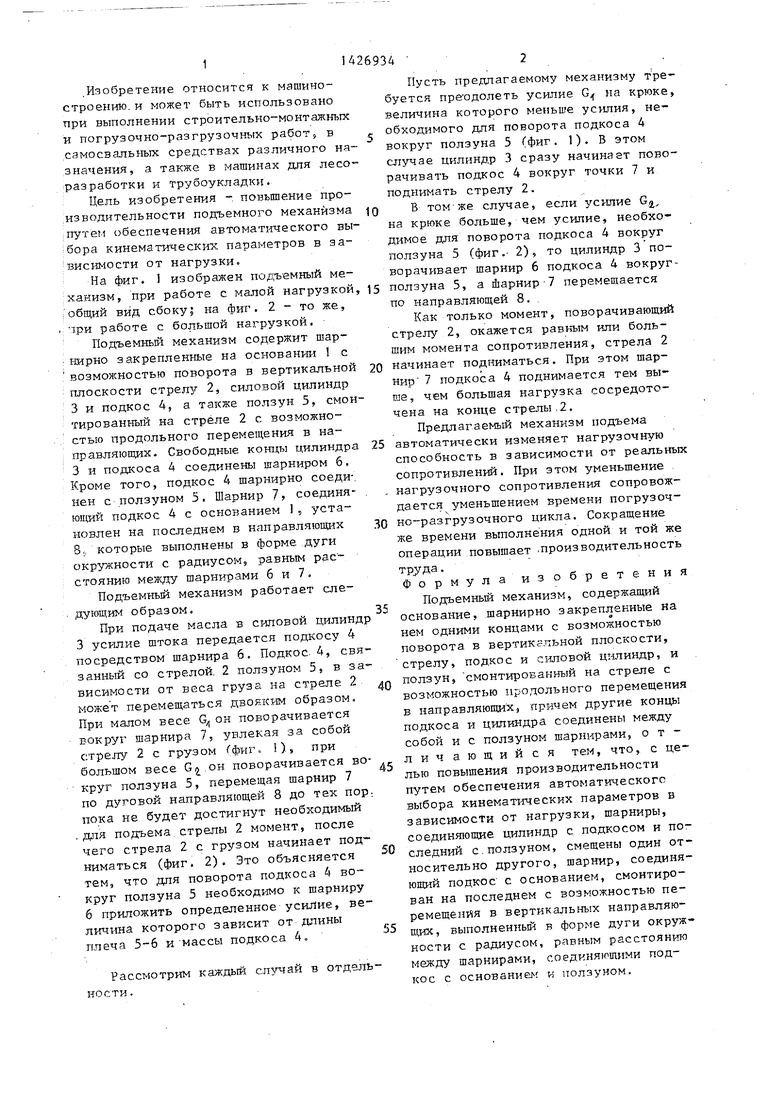
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРЕЛОВОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2014 |
|
RU2572354C1 |
| ГИДРАВЛИЧЕСКИЙ ПОВОРОТНЫЙ КРАН | 1991 |
|
RU2021969C1 |
| Манипулятор | 1988 |
|
SU1684021A1 |
| Транспортное средство с погрузочно-разгрузочным устройством | 1990 |
|
SU1787831A1 |
| КРАН | 1965 |
|
SU223615A1 |
| Кран-манипулятор | 2021 |
|
RU2760370C1 |
| Механизм поворота погрузочнойМАшиНы | 1979 |
|
SU819361A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |
| КРЕПЕУСТАНОВЩИК | 1995 |
|
RU2078935C1 |
| УСТРОЙСТВО для ПЕРЕВОЗКИ ДЛИННОМЕРНЫХ ТРУБ БОЛЬШОГО ДИАМЕТРА | 1973 |
|
SU368092A1 |
Изобретение относится к машино- строенио и может быть использовано при выполнении строительно-монтажных и погрузочно-разгрузочных работ. Цель изобретения повышение производительности путем обеспечения автоматического выбора кинематических параметров Б зависимости от нагрузки. Подъемный механизм содержит шарнирно закреп.аенные на основании -1 с возможностью поворота в вертикёгльной плоскости стрелу 2, силовой цилиндр 3 и подкос 4, а также ползун 5, смонтированный на стреле 2 с возможностью продольного перемещения в направляющих. Свободные концы цилиндра 3 и подкоса 4 соединены шарниром 6. Кроме того, подкос 4 шарнирно соединен с-ползуном 5. Шарнир 7, соединяющий подкос 4 с основанием I, установлен на последнем в направляющих 8, которые, вьшолнены в форме дуги окружности с радиусом, равным расстоянию между шарнирами 6 и 7. 2 ил. с (О 4; tc О5 со со 4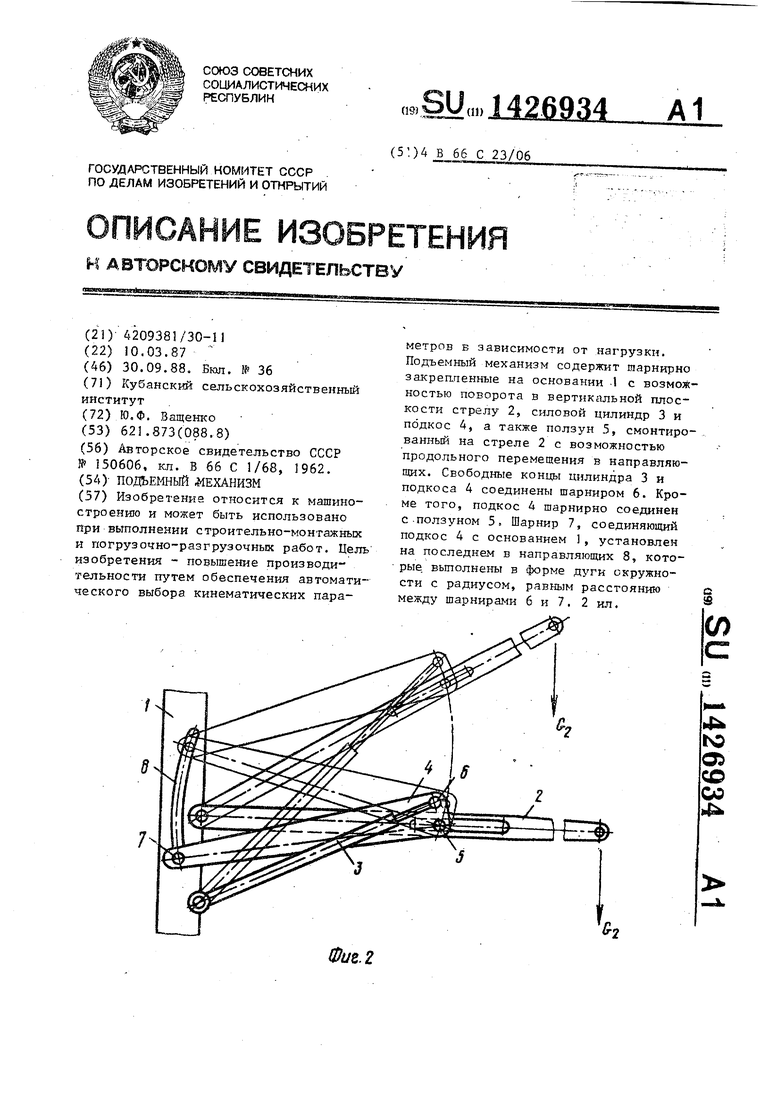
:ханизм, при работе с малой нагрузкой, 15 ползуна 5, а йарнир- перемещается
: общий вид сбоку; на фиг. 2 - то же,
мри работе с большой нагрузкой.
Подъемньй механизм содержит шар- нирно закрепленные на основании 1 с возможностью поворота в вертикальной плоскости стрелу 2, силовой цилиндр 3 и подкос 4, а также ползун 5, смонтированный на стреле 2 с возможностью продольного перемещения в направляющих. Свободные концы цилиндра 3 и подкоса 4 соединены шарниром 6. Кроме того, подкос 4 шарнирно соеди-. ней с ползуном 5. Шарнир 7) соедини- . ющий подкос 4 с основанием I, установлен на последнем в направляющих S, которые выполнены в форме .дуги окружности с радиусом, равным расстоянию между шарнирами б и 7.
Подъемньй механизм работает сле,пующим образом.
При подаче масла в силовой цилиндр 3 штока передается подкосу 4 посредством шарнира 6. Подкос. 4, связанный со стрелой. 2 ползуном 5, в висимости от веса груза на стреле 2 может перемещаться двояким образом. При малом весе G он поворачивается вокруг шарнира 7, увлекая за собой стре.ггу 2 с грузом (фиг. )., при большом весе С.он поворачивается so- круг ползуна 5, перемещая шарнир 7 по дуговой направляющей 8 до тех пор. пока не будет достигнут необходимый
для подъема.стрелы 2 момент, после чего стрела 2 с грузом начинает подниматься (фиг. 2). Это объясняется тем, что ,цля поворота подкоса 4 вокруг ползуна 5 необходимо к шарниру б приложить определенное усилие, величина которого завнсит от длины плеча 5-6 и массы подкоса 4.
Рассмотрим каждый случай в отдельности.
20
5
0
5
0
5
0
5
по направляющей 8. .
Как только момент, поворачивающий стрелу 2, окажется равным или большим момента сопротивления, стрела 2 начинает подниматься. При этом шарнир 7 подкоса 4 поднимается тем выше, чем большая нагрузка сосредоточена на конце стрелы,2.
Предлагаемый механизм подъема автоматически изменяет нагрузочную способность в зависимости от реальных сопротивлений. При этом уменьшение . нагрузочного сопротивления сопровождается уменьшением времени погрузоч- но-разгрузочного цикла. Сокращение же времени выполнения одной и той же операции повышает .производительность труда. Формулаиз обретения
Подъемньй механизм, содержащий основание, шарнирно закрепленные на нем одними концами с возможностью поворота в вертикальной плоскости, стрелу, подкос и силовой ЦIiлиндp, и ползун, смонтированный на стреле с возможностью продольного перемещения в направляюшиха причем другие концы подкоса и цилиндра соединены между собой и с ползуном шарнирами, отличающийся тем, что, с целью повышения производительности путем обеспечения автоматического выбора кинематических параметров в зависимости от нагрузки, шарниры, соединяющие цилиндр с подкосом и последний с.ползуном, смещены один относительно другого, шарнир, соединя- юшлй подкос с основанием, смонтирован на последнем с возможностью перемещения в вертикальных направляющих, выполненный в форме дуги окружности с радиусом, равным расстоянию между шарнирами, соединяющими подкос с основание и ползуном.
Э-ЕЗ
Фиг.1
| Подъемный механизм | 1961 |
|
SU150606A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
