УМА agffffff&ma
ffQM
4i -vl
СО
со сд
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выбора частотных диапазонов передачи группового радиосигнала | 1982 |
|
SU1072277A1 |
| Преобразователь перемещения в код | 1989 |
|
SU1656682A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Цифровой анализатор спектра | 1985 |
|
SU1256044A1 |
| Устройство для цифровой обработки сигналов | 1978 |
|
SU746549A1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1758875A1 |
| Цифровой адаптивный фильтр | 1990 |
|
SU1837322A1 |
| Цифровой анализатор гармоник | 1979 |
|
SU822072A1 |
| Цифровой фильтр | 1990 |
|
SU1739483A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ | 1984 |
|
SU1840542A2 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для измерения компонент кватерниона, определяющего относительное пространственное расположение подвижных элементов многостепенного механического подвеса. Цель изобретения - расширение функциональных возможностей. Устройство для измерения компонент кватэрниона содержит синусно-коси- нусньш вращающийся трансформатор 1, первый 2 и второй 3 анапого-цифро- вые преобразователи, регистр 4 сдвига, цифровой сумматор 5, цифровой вычитатель 6, первый 7 блок констант, блок 8 умножения, второй блок 9 констант, блок 10 вычисления квадратного корня, коммутатор 11, генератор 12 тактовых импульсов. Цель изобретения достига ется за счет вве- S дения элементов и блоков 4-11. 1 ил. (Л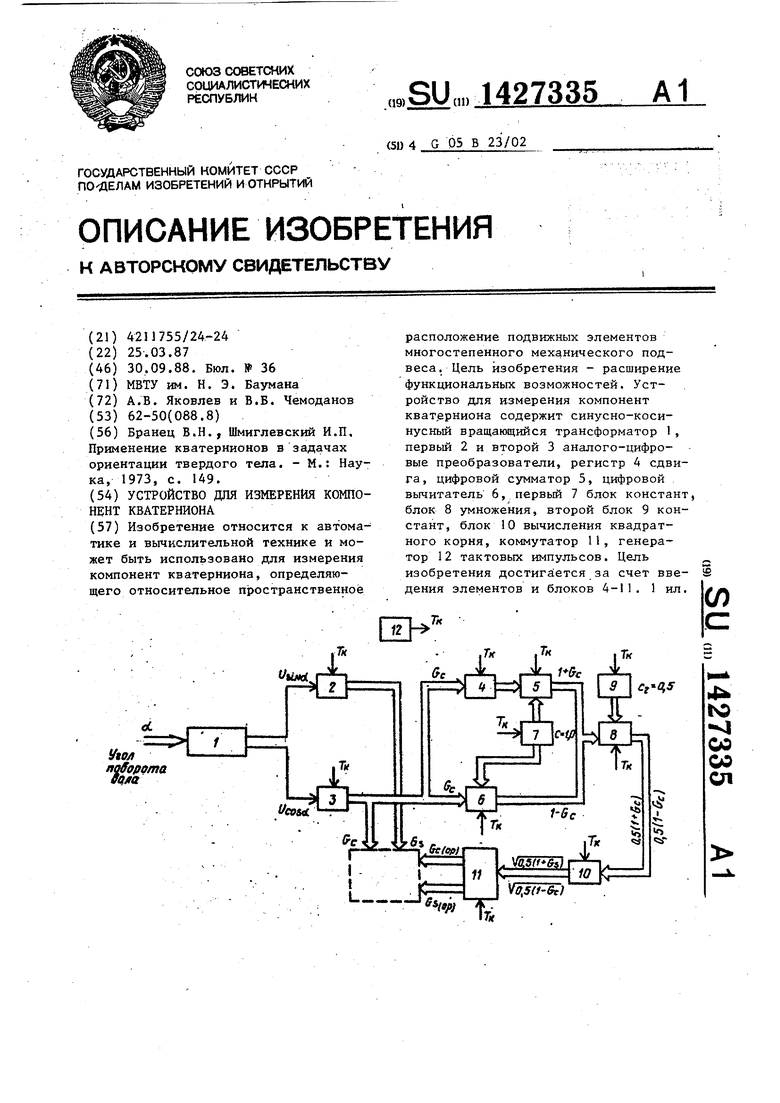
,; 1«
Изобретение относится к автоматике и вычислительной технике и может быть использовано для измерения компонент кватерниона, определяющего относительное пространственное расположение подвижных элементов многостепенного механического подвеса.
. Цель изобретения - расширение функциональных возможностей.
Основой функционирования устройства является то свойство, что нормированный кватернион-дуга Лд как функция времени t, в общем случае может быть представлен известной тригонометрической формулой
Ла() Aa(coso((t) -t-l sino(.(t)y (1
где Aacoso((t) и (t}
{компоненты ; ватер- ниона-дупи; единичный вектор, совпадающий с вектоной частью кватерниона .
При этом векторная часть соответствующего кватерниона, связанного с элементом механического подвеса, или априорно известна (неподвижна в. инер-30 циальном базисе), или находится в известной неподвшсной (априорно известной) плоскости, 1-ши во вращающейся плоскости и т.д.
Любой кватернион-дуга Лб.(агс) 35 и соответствующий кватернион-оператор вращения Ag.(0pj находятся в следующем соотношении:
Л к ( S оС()
Л-а(.оР)Ла(со5 -у-
) (2-)
25 с;
40
На чертеже представлена функциональная схема устройства для. измерения компонент кватерниона.
Устройство для измерения компонент кватерниона содержит синусно- косинусный вращающийся трансформатор I, первый 2 и второй 3 аналого- цифровый преобразователи, регистр 4 сдвига, цифровой сумматор 5, цифровой вычитатель 6, первый блок 7 констант, блок 8 умножения, второй блок 9 констант, блок 10 вычисления квадратного корня, коммутатор 1, генератор 12 тактовых импульсов.
Устройство работает следующим образом.
При вращении синусно-косинусного вращающегося трансформатора .1. сигна
0
5
с его обмотки поступают на входы аналого-цифровых преобразователей 2, 3, где преобразуются в цифровую фор- с му. Коды на выходах первого и второго аналого-цифровых преобразователей являются компонентами кватерниона-дуги, причем двоичньй код, соответствующий напряжению с синусной
o обмотки определит скалярную часть 1 ватерниона-дуги, а код, соответствующий напряжению с косинусной обмотки, - его векторную часть. Таким образом, считывая информацию с
5 первого и второго выходов устройства, можно в цифровой форме определить кватернион-дуги по формуле
,;) Go(nT)+ i5Gsy(nT)j.
0 где Д(ц5 кватернион-дуга ;
пТ - дискретное время; 5 Gjj - скалярная и векторная компоненты.
5 С выхода второго аналого-цифрового преобразоватрля код поступает также на группу оходов регистра 4 сдвига и цифрового вычислителя 6. С выхода регистра сдвига сигнал, задержанный на такт генератора тактовых импульсов, поступает на вход цифрового сумматора . На вторую группу входов цифровых сумматоров 5 и вычитателя 6-поступает единичная константа с первого блока 7 констант. Сигналы с выходов цифрового сумматора и вычитателя со сдвигом, во времени поступают на пер- вую группу входов блока 8 умножения, где умножается на константу 0,5, хранимую во втором блоке 9 констант. Результат умножения поступает на вход блока 10 вычисления квадратного корня, на выходе которого попеременно возникают компоненты с; кватерниона-оператора вращения, распределяемые коммутаторы 1 1 на тре- - тий и четвертый выходы устройства. Таким образом, считывая информацию с этих выходов, можно в цифровой форме определить кватернион-оператор вращения по формуле
Ас(орц5 ссусор; + (ор), где Gcc::f(OP) ± So,5(H-Gc7), . 5 Gcs:fcoP) tVO,5(l-Gcy),
соответственно скалярная и вектор- .ная компоненты кватерниона-оператора вращения.
0
0
Формула изобретения
Устройство для измерения компонент кватерниона, содержащее первый и второй аналого-цифровые преобразователи, блок умножения, генератор тактовых импульсов, подключенный выходом к тактовым входам аналого-цифровых преобразователей и управляющему входу блока умножения, от л и- чающееся тем, что с целью расширения функциональных возможностей, введены синусно-косинусный вращающийся: трансформатор, регистр сдвига, цифровой сумматор, цифровой вычитатель, первый и второй блоки констант, блок вычисления квадратного корня и коммутатор, синусный и косинусный выходы синусно-косинусно- го вращающегося трансформатора соответственно через первый и второй аналого-цифровые преобразователи соединены с первой и второй группами выходов устройства, информаци- ойные вьжоды второго аналого-цифро- вого преобразователя подключены к
первой группе информационных входов цифрового сумматора, вторые гуппы информационных входов цифрового вычитателя и цифрового сумматора соединены с выходами первого блока констант, информационные выходы цифрового сумматора и цифрового вычитателя соединены с первой группой информационных входов блока умножения, вторая группа информационных входов которого подключена к выходам второго блока констант, а информационные выходы соединены с входом блокд вычисления квадратного корня, выход которого соединен с информационными входами коммутатора, первая и вторая группы информационных
выходов которого являются третьей и четвертой группами выходов устройства, выход тактового генератора подключен к тактовым входам регистра сдвига и входам управления первого и второго блоков констант, блока умножения, блока йьгчисления квадратного корня и коммутатора.
| Бранец В.Н., Шмиглевский И.П, Применение кватернионов в задачах ориентации твердого тела | |||
| - М.: Наука, 1973, с | |||
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |
