f/ ff/ff/i f//y/ //
г 3
Изобретение относится к измерительной технике и может быть использовано, например, в шинной промьпплен- ности при измерении параметров про- текторной ленты.
Целью изобретения является повышение точности измерений за счет компенсации поперечного сдвига контролируемой ленты.
На чертеже приведена блок-схема устройства
Устройство содержит направляющую |, установленные на ней каретки 2 И 3, червяк 4, образующий с каретка- (||И 2 и 3 пару гайка-винт, скобу 5, Закрепленную на каретках 2 и 3 с воз- |1ожностью перемещения по направляю- фей 1. Узлы 1-5 образуют механизм Перемещения измерителя толщины попе- ек контролируемой ленты, i Контролируемая лента базируется rta неподвижном наконечнике 6, с верХ поверхностью материала контактирует наконечник 7, связанный с изме- рителем 8 толщины ленты.
Устройство содержит также датчики 9 и 10 ширины, размещенные по краям контролируемой ленты, следящий привод 11, кинематически связанньй с червя- ком 4, вычислительный блок 12, соединенный с его входом задатчик 13 положения измерителя толщины ленты, сумматор 14, подключенный к выходам датчиков 9 и 10 ширины, индикатор 15 ширины ленты, соединенный с выходом сумматора 14. Устройство контролирует параметры ленты 16.
Устройство работает следующим образом.
При перемещении контролируемой Л1енты 16 наконечник 7, контактируя с поверхностью ленты, передает изменение толщины на измеритель 8 толщины л:енты. Сигналы с иыходов датчиков 9 и 10 ширины передаются через сумматор 14 на индикатор 15 ширины и на вычислительный блок 12. Задатчик 13 положения измерителя толщины ленты задает значение позиционирования измерителя 8 толщины, т.е. точки, в которой нужно произвести измерений тол щины, Вычислительньй блок 12 корректирует значение координаты позиционирования, компенсируя значение поперечного смещения ленты по элго- ритму
,( .x,/ш,
где скорректированная координата позиционирования (выходной сигнал с блока 12); &Х,,
uXj - отклонение, соответственно, левой и правой кромок контролируемой ленты от номи- нальньк положений (выходные сигналы с датчиков 9, 10); Ufr нескорректированная координата позиционирования (выходной сигнал с задатчи- ка 13); Ш ц - номинальное значение ширины
протекторной ленты. Первое слагаемое алгоритма представляет собой необходимую поправку, вызванную поперечным смещением контролируемой ленты. Коэффициент
i i ш и
представляет собо
поправочный коэффициент координаты позиционирования, вызванный изменением ширины ленты. Выходной сигнал вычислительного блока подается на следящий привод 11, стабилизируя положение измерительных наконечников 6 и, 7 на контрольных точках протекторной ленты, компенсируя погрешности смещения и изменения ширины.
Формула изобретения
Устройство для измерения геометрических параметров движущейся протекторной ленты, содержащее измеритель толщины ленты, датчики ширины, индикатор ширины ленты, о т л и ч а- ю щ е ее я тем, что, с целью повышения точности измерений, оно снабжено задатчикон положения измерителя толщины ленты, подключенным к его выходу вычислительным блоком, подключенным к выходу последнего следящим приводом, сумматором, измеритель тол- йщны ленты выполнен с возможностью перемещения поперек контролируемой ленты и размещен на механизме перемещения измерителя толщины, кинематически связанном со следящим приводом, датчики ширины размещены по краям контролируемой ленты, выходы их соединены с соответствукнцими входами сумматора, и вторым и третьим входами вычислительного блока, а индикатор толщины ленты подключен к выходу сумматора.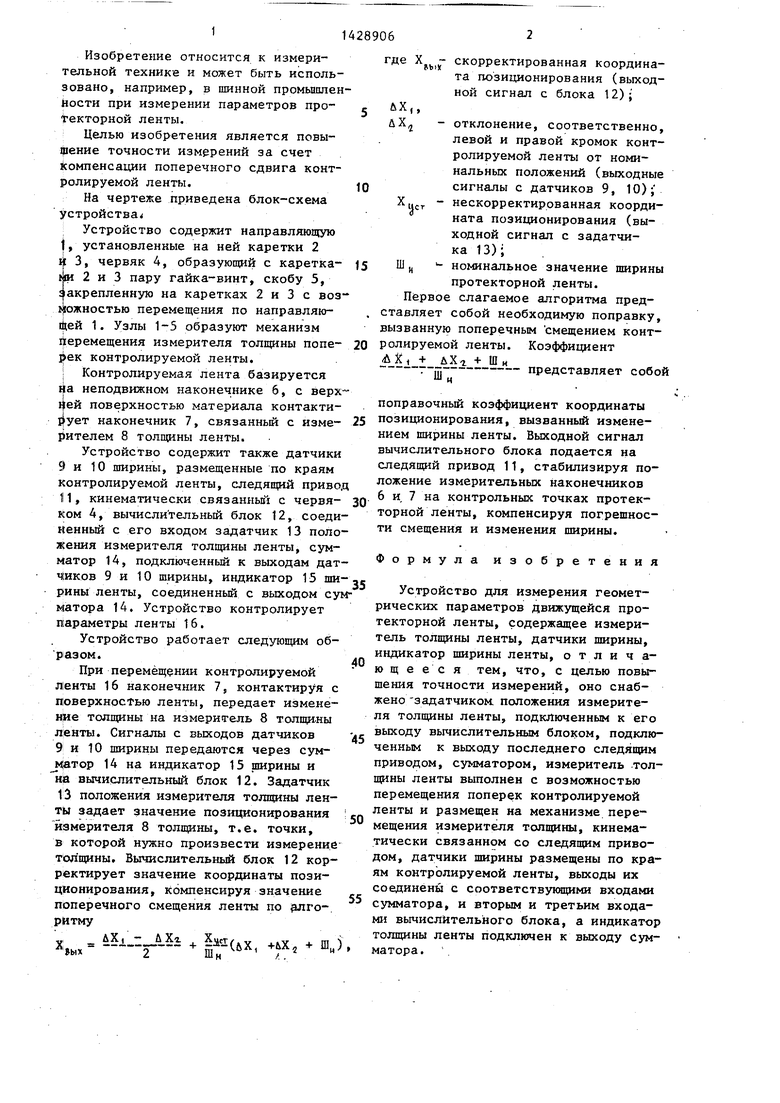
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля геометрических параметров движущейся протекторной ленты | 1986 |
|
SU1330452A1 |
| Перспектограф | 1971 |
|
SU559842A1 |
| СПОСОБ КОНТРОЛЯ ПРОФИЛЯ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2263879C2 |
| Устройство автоматического раскроя заготовки на летучем отрезном станке | 1982 |
|
SU1092015A1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2311614C2 |
| Способ контурного измерения изделий на координатных измерительных машинах и измерительный наконечник для реализации способа | 1978 |
|
SU1075071A1 |
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
| Сборочный робот | 1986 |
|
SU1355477A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2299400C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ТОЛЩИНЫ ЛИСТОВОГО ПРОКАТА | 2010 |
|
RU2458318C2 |
Изобретение относится к измерительной технике и может быть использовано, например, в шинной промьшленности при измерении параметров протекторной ленты. Целью изобретения является повышение точности измерений. При перемещении контролируемой ленты 16 наконечник 7, контактируя с поверхностью ленты, передает изменение толщины на измеритель В толщины ленты. Сигналы с выходов датчиков 9, 10 ширины передаются через сумматор 14 на индикатор 15 ширины. Задатчик 13 положения измерителя толщины ленты задает значение позиционирования измерителя 8 толщины. Вычислительный блок 12 корректирует значение координаты позиционирования, передавая при смещении контролируемой ленте в поперечном направлении сигнал- на следящий привод 11 , который пере- ff мещает скобу 5 с расположенным на ней измерителем 8 толщины до тех пор, С пока измеритель 8 не займет требуемого положения относительно центра сим- 2 метрии ленты. 1 ил.
| Автоматическая машина для измерения площади и толщины кож | 1953 |
|
SU98397A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения геометрических параметров длинномерных движущихся объектов | 1980 |
|
SU934191A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
