(21)4151392/28-12
(22)24.11.86
(46) 23.10.88. Бюл. № 39
(75) Ю.П.Гилев, П.Ю.Гилев
и А.Ю.Гилев
(53) 621.771.067 (088.8)
(56) Авторское свидетельство СССР
№359080, кл. В 21 С 47/24, 1971.
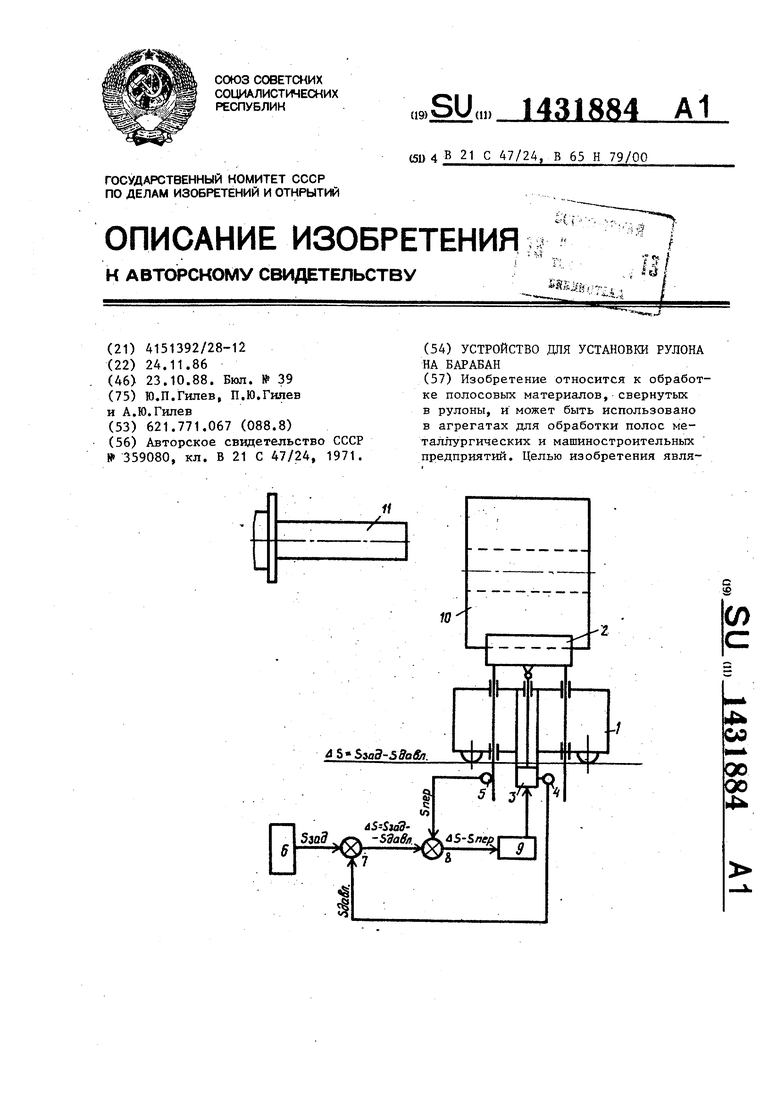
(54) УСТРОЙСТВО ДЛЯ УСТАНОВКИ РУЛОНА НА БАРАБАН
(57) Изобретение относится к обработке полосовых материалов, свернутых в рулоны, и может быть использовано в агрегатах для обработки полос металлургических и машиностроительных предприятий. Целью изобретения явля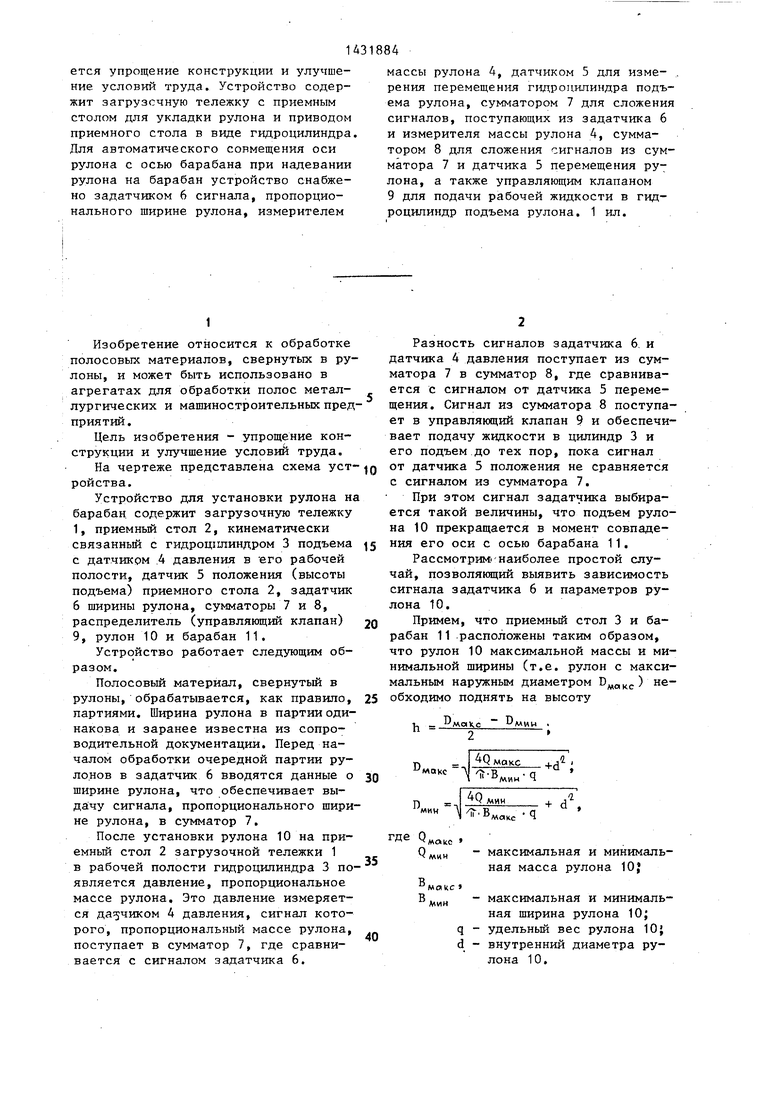
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ РУЛОНОВ ПОЛОСЫ ПРИ СНЯТИИ С БАРАБАНА МОТАЛКИ | 2004 |
|
RU2268803C1 |
| Система управления разгрузочным устройством | 1987 |
|
SU1424895A1 |
| Устройство для закатки полосового материала | 1989 |
|
SU1680568A1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВАНИЯ РУЛОНОВ ПОЛОСЫ НА РАЗМАТЫВАТЕЛЕ | 2004 |
|
RU2268804C1 |
| Непрерывный агрегат для производства узких полос | 1978 |
|
SU948018A1 |
| УСТРОЙСТВО для ЦЕНТРИРОВАНИЯ РУЛОНА ПОБАРАБАНА | 1972 |
|
SU359080A1 |
| ЛИНИЯ АВТОМАТИЧЕСКАЯ ПРОДОЛЬНО-ПОПЕРЕЧНОЙ РЕЗКИ РУЛОННОЙ СТАЛЬНОЙ ПЛОСКОЙ ЛЕНТЫ НА МЕРНЫЕ ПОЛОСЫ | 2022 |
|
RU2810218C2 |
| Тележка для транспортирования и установки рулонов | 1976 |
|
SU651869A1 |
| Устройство для регистрации сварныхшВОВ HA НЕпРЕРыВНОМ CTAHE ХОлОдНОйпРОКАТКи | 1979 |
|
SU820949A2 |
| Система автоматического управления парогидравлическим ковочным прессом | 1979 |
|
SU774966A1 |
10
(Л
Т
00 00
143
ется упрощение конструкции и улучшение условий труда. Устройство содержит загрузочную тележку с приемным столом для укладки рулона и приводом приемного стола в виде гидроцилиндра. Для автоматического совмещения оси рулона с осью барабана при надевании рулона на барабан устройство снабжено задатчиком 6 сигнала, пропорционального ширине рулона, измерителем
1
Изобретение относится к обработке полосовых материалов, свернутых в рулоны, и может быть использовано в агрегатах для обработки полос металлургических и машиностроительных предприятий.
Цель изобретения - упрощение конструкции и улучшение условий труда.
На чертеже представлена схема устройства.
Устройство для установки рулона на барабан, содержит загрузочную тележку 1, приемньй стол 2, кинематически связанный с гидрощшиндром 3 подъема с датчиком .4 давления в его рабочей полости, датчик 5 положения (высоты подъема) приемного стола 2, задатчик 6 ширины рулона, сумматоры 7 и 8, распределитель (управляющий клапан) 9, рулон 10 и барабан 11,
Устройство работает следующим образом,
Полосовый материал, свернутый в рулоны, обрабатывается, как правило, партиями. Ширина рулона в партии одинакова и заранее известна из сопроводительной докзгментации. Перед началом обработки очередной партии рулонов в задатчик 6 вводятся данные о ширине рулона, что обеспечивает вы- да:чу сигнала, пропорционального ширине рулона, в сумматор 7,
После установки рулона 10 на приемный стол 2 загрузочной тележки 1 в рабочей полости гидроцилиндра 3 появляется давление, пропорциональное массе рулона. Это давление измеряется датчиком 4 давления, сигнал которого, пропорциональный массе рулона, поступает в сумматор 7, где сравнивается с сигналом задатчика 6.
884
массы рулона 4, датчиком 5 для изме- , рения перемещения гидроцилиндра подъема рулона, сумматором 7 для сложения сигналов, поступающих из задатчика 6 и измерителя массы рулона 4, сумматором 8 для сложения сигналов из сумматора 7 и датчика 5 перемещения рулона, а также управляющим клапаном 9 для подачи рабочей жидкости в гидроцилиндр подъема рулона, 1 ил.
Разность сигналов задатчика 6. и датчика 4 давления поступает из сумматора 7 в сумматор 8, где сравнивается с сигналом от датчика 5 перемещения. Сигнал из сумматора 8 поступает в управляющий клапан 9 и обеспечивает подачу жидкости в цилиндр 3 и его подъем до тех пор, пока сигнал от датчика 5 положения не сравняется с сигналом из сумматора 7,
При этом сигнал задатчика выбирается такой величины, что подъем рулона 10 прекращается в момент совпадения его оси с осью барабана 11,
Рассмотрим; -наиболее простой случай, позволянлций выявить зависимость сигнала задатчика 6 и параметров рулона 10,
Примем, что приемный стол 3 и барабан 11 расположены таким образом, что рулон 10 максимальной массы и минимальной ширины (т.е, рулон с максимальным наружным диаметром D,) необходимо поднять на высоту
ная масса рулона 10}
макс
максимальная и минимальная ширина рулона 10; q - удельный вес рулона 10} d - внутренний диаметра рулона 10,
Согласно принятому условию, что рулон 10 с ,. поднимать не нужно, сигнал задатчи7 а 6 в этом случае устанавливают равным сигналу датчика 4, при этом разность сигналов , следовательно, сигнал в управляющий клапан 9 не поступает, не подается жидкость в цилиндр 3 подъема рулона и нет сигнала обратной связи от датчика 5 перемещения.
Если при этом же сигнале на задат чике 6 установить рулон 10 меньшей массы, датчик 4 выработает соответственно меньший по величине сигнал, еле довательно, появится разностный сигнал („д-5.д , который поступит в управляющий клапан 9, последний начнет подвать жидкость в цилиндр 3. При перемещении поршня цилиндра 3 по- является и увеличивается по мере перемещения сигнал обратной связи от датчика 5. Когда сигнал S сравняется с разностным сигналом uS, перестает поступать сигнал в управляю- щий клапан 9, последний прекращает подачу жидкости и цилиндр 3 останавливается.
Если изменяется ширина рулона, приходится производить пропорциональное изменение сигнала на задатчике 6.
Следует отметить, что работа устройства возможна без определения и использования математических зависи- мостей при формировании управляющих сигналов.
Возможно использовать в устройстве датчики давления 4 и перемещения 5 с аналоговыми электрическими сигналами, величина сигналов в которых изменяется пропорционально давлению или переметдению. Например, в качестве датчика 4 давления можно использовать преобразователь давления типа Индук- тосин.
В этом случае задача при наладке устройства заключается в подборе сиг10
318844
нала задатчика Г для рулона 10 максимальной массы и минимальной ширины и в последуюп1е.й его корректировке на заданный диапазон ширин рулонов.
Показания датчика 4 будут несколько изменяться при движении поршня цилиндра 3 по сравнению с неподвижным положением. Если не рассматривать динамические процессы в момент трогания, то разница заключается в коэффициентах трения покоя и движения в узле уплотнения поршня цилиндра 3.
ПОСКОЛЬКУ коэффициент трения при движении меньше, чем коэффициент трения при покое, сопротивление в узле уплотнения при движении меньше, следовательно, меньше погрешность измерения массы рулона, хотя для работы системы не имеет значения, так как погрешности компенсируются подбором сигнала задатчика при наладке.
Формула изобретения
Устройство для установки рулона на барабан, содержащее средство транспортировки рулона, размещенньй на нем приемный стол с гидроцилиндром его подъема, подключенным к линии нагнетания жидкости через регулирующий клапан, и средство для совмещения осе барабана и рулона, отлич аю- щ е е с я тем, что, с целью упроще- ния конструкции и улучшения условий труда, средство для совмещения осей барабана и рулона содержит задатчик ширины рулона, датчик массы рулона в виде датчика давления жидкости в рабочей полости гидроцилиндра, датчик положения приемного стола и сумматоры, причем задатчик ширины рулона и датчик давления жидкости в рабочей полости гидроцилиндра подключены к соответствующим входам первого сумматора, соединенного выходом с первым входом второго сумматора, связанного .вторым входом с датчиком положения приемного стола, а выходом - с управляющим входом регулирующего клапана.
