Изобретение относится к металлообработке и может быть использовано при захвате схватом робота детали.
Цель изобретения - расширение функциональных возможностей путем подачи деталей в зону схвата робота в зафиксированном положении.
На фиг. 1 изображено загрузочное устройство в исходном положении, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 -
вид Б на фиг. 1; на фиг. 4
Маятниковый передающий блок 7, который установлен с помощью оси 30 в отверстии ползушки 6, имеет ролики 31 и подпружиненную створку 32, образующую совместно с передающим блоком ложемент для головки детали 9 с заплечиками 33.
В корпусе маятникового передающего блока 7 выполнен проем 34 для перемещения упора 17, а в створке 32 - выступ 35, с возможностью взаимодействия
20
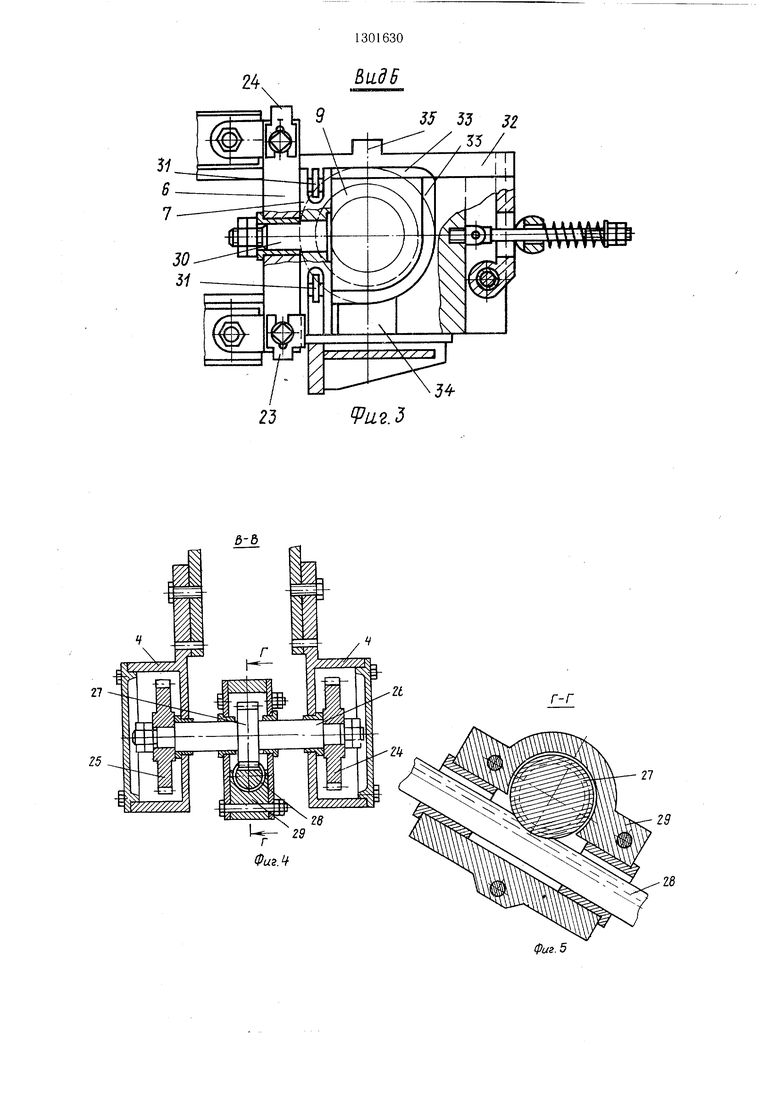
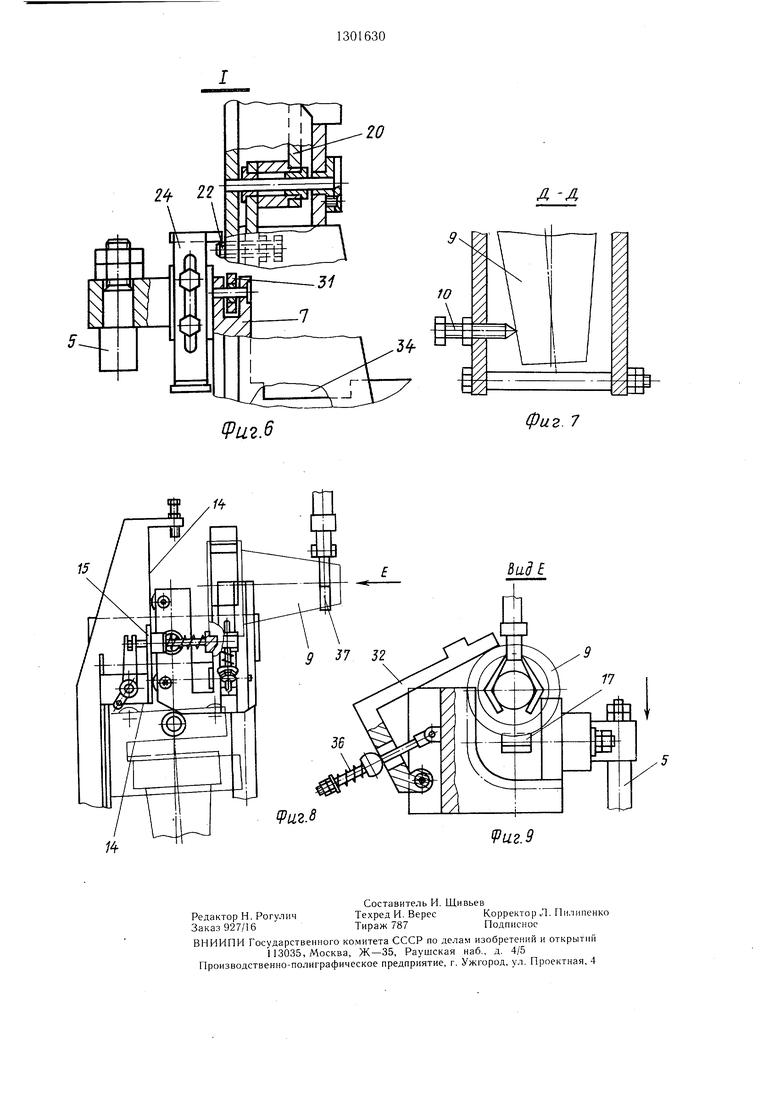
В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 4; на фиг. 6 - узел I на фиг. 1; на фиг. 7 - разрез Д-Д на фиг. 1; на фиг. 8 - момент раскрытия маятникового блока при опускании ползущки; на фиг. 9 - вид Е на фиг. 8.
Загрузочное устройство содержит подводящий лоток 1 с направляющей 2 для перемещения его при наладке по основанию 3 и направляющими 4 для перемещения в них скалок 5 ползущки 6, на которой щар- нирно закреплен маятниковый передающий блок 7.
Для перемещения ползущки 6 совместно с маятниковым передающим блоком 7 служит привод (пневмоцилиндр) 8.
Подводящий лоток 1 выполнен в виде 25 двух параллельных планок, установленных с помощью втулок одна от другой на расстоянии, больщем диаметра стержня детали 9 и меньшем диаметра ее головки. С целью предотвращения зависания детали 9 в планки в щахматном порядке ввернуты винты 10 30 с заточенными концами.
На одной из планок лотка 1 установлен во втулке отсекатель 11, который с помощью пальца взаимодействует с прорезью подпружиненного рычага 12, навещенного шарнирно на кронщтейне 13. Ос- 35 нование 3 имеет базовую площадку 14, к которой приварено ребро 15, во втулках . последнего установлены направляющие 16 упора 17, обработанного по окружности равной диаметру головки заготовки 9. Направляющие 16 используются для установки пружин 18 сжатия и пальца 19, который на- ходится в прорези рычага 20, щарнирно закрепленного на основании 3.
В основание 3 ввинчен регулировочный винт 21, а в тело рычага 20 запрессован винт 22.
Ползушка 6 снабжена пазами для установки регулируемых упоров 23 и 24. Первый при работе взаимодействует с рычагом 12, второй - с рычагом 20 через винт 22.
разрез 10 фч повороте с упором 17. Шарнирно установленный подпружиненный щток 36 используется для возвращения створки 32 в исходное положение. С целью совмещения траектории движущихся роликов 31 с рабочей поверхностью площадки 14, а также 5 установки соосно с деталью 9 упора 17, используется перемещение регулировочного винта 21 и основания 3 в направляющих 2. Для захвата детали 9 используется схват 37 руки робота.
Устройство работает следующим образом.
В исходном положении маятниковый передающий блок 7 находится в крайнем нижнем положении и покоится на планках подводящего лотка 1. При этом заплечики 33 ложемента для головки детали 9 являются продолжением несущей плоскости подводящего лотка 1, а регулируемые упоры 23 и 24 ползушки 6 в результате их взаимодействия с рычагом 12 и рычагом 20 через винт 22 переводят отсекатель 11 и упор 17 в нерабочее положение.
В нерабочем положении отсекатель 11 освобождает проход в лотке 1 для детали 9, а упор 17 перемещается в сторону базовой площадки 14 основания 3 пружинами 18.
Деталь 9 из бункера (не показан) поступает по наклонной несущей плоскости подводящего лотка 1 к выходу последнего и зависает в ложементе на заплечиках 33. Стержни движущихся по лотку заготовок контактируют с концами винта 10, что приводит к колебательному движению деталей 9 и исключает их зависание при движении по криволинейной части лотка.
При перемещении щтока пневмоцилинд- ра 8 и вследствие кинематической связи реек с шестернями 25 и 27 ползущки 6 совместно с маятниковым передающим блоком 7, в ложементе которого находится деталь 9, поднимается. Подъем ползущки 6 нарущает взаимосвязь регулирующих упоров 23 и 24 с соответствующими рычагами, которые поворачиваются под действием пружин. Поворот рычага 12 выводит отсе40
45
На наружной поверхности каждой скал- 50 катель 11 в рабочее положение, предохраняя детали 9 от выпадания из лотка 1, а поворот рычага 20 перемещает упор 17 в сторону от базовой площадки 14 основания 3. Во время подъема ползущки 6 и контакта одного из роликов 31 маятникового кинематически связана с рейкой 28, уста- 55 передающего блока 7 с базовой площадки 5 нарезаны рейки, которые находятся в зацеплении с шестернями 25, расположенных в корпусах направляющих 4 и насаженных на вал 26, последний выполнен за одно целое с шестерней 27, которая
новленной во втулке корпуса 29 и соединенной со штоком пневмоцилиндра 8.
кой 14 последний вместе с деталью 9 поворачивается на 90° и продолжает движеМаятниковый передающий блок 7, который установлен с помощью оси 30 в отверстии ползушки 6, имеет ролики 31 и подпружиненную створку 32, образующую совместно с передающим блоком ложемент для головки детали 9 с заплечиками 33.
В корпусе маятникового передающего блока 7 выполнен проем 34 для перемещения упора 17, а в створке 32 - выступ 35, с возможностью взаимодействия
новленный подпружиненный щток 36 используется для возвращения створки 32 в исходное положение. С целью совмещения траектории движущихся роликов 31 с рабочей поверхностью площадки 14, а также установки соосно с деталью 9 упора 17, используется перемещение регулировочного винта 21 и основания 3 в направляющих 2. Для захвата детали 9 используется схват 37 руки робота.
Устройство работает следующим образом.
В исходном положении маятниковый передающий блок 7 находится в крайнем нижнем положении и покоится на планках подводящего лотка 1. При этом заплечики 33 ложемента для головки детали 9 являются продолжением несущей плоскости подводящего лотка 1, а регулируемые упоры 23 и 24 ползушки 6 в результате их взаимодействия с рычагом 12 и рычагом 20 через винт 22 переводят отсекатель 11 и упор 17 в нерабочее положение.
В нерабочем положении отсекатель 11 освобождает проход в лотке 1 для детали 9, а упор 17 перемещается в сторону базовой площадки 14 основания 3 пружинами 18.
Деталь 9 из бункера (не показан) поступает по наклонной несущей плоскости подводящего лотка 1 к выходу последнего и зависает в ложементе на заплечиках 33. Стержни движущихся по лотку заготовок контактируют с концами винта 10, что приводит к колебательному движению деталей 9 и исключает их зависание при движении по криволинейной части лотка.
При перемещении щтока пневмоцилинд- ра 8 и вследствие кинематической связи реек с шестернями 25 и 27 ползущки 6 совместно с маятниковым передающим блоком 7, в ложементе которого находится деталь 9, поднимается. Подъем ползущки 6 нарущает взаимосвязь регулирующих упоров 23 и 24 с соответствующими рычагами, которые поворачиваются под действием пружин. Поворот рычага 12 выводит отсе
катель 11 в рабочее положение, предохраняя детали 9 от выпадания из лотка 1, а поворот рычага 20 перемещает упор 17 в сторону от базовой площадки 14 основания 3. Во время подъема ползущки 6 и контакта одного из роликов 31 маятникового передающего блока 7 с базовой площад катель 11 в рабочее положение, предохраняя детали 9 от выпадания из лотка 1, а поворот рычага 20 перемещает упор 17 в сторону от базовой площадки 14 основания 3. Во время подъема ползущки 6 и контакта одного из роликов 31 маятникового передающего блока 7 с базовой площадкой 14 последний вместе с деталью 9 поворачивается на 90° и продолжает движение вверх до соприкосновения с регулировочным винтом 21. От выпадания детали 9 из ложемента предохраняет ее контакт с поверхностью ползушки 6. При повороте передающего блока 7 выступ 35 створки 32, упираясь в упор 17, перемещает его в нерабочее положение, сжимая пружину 18. Во время подъема повернутого блока 7 упор 17 совмещается с проемом 34 и под действием пружин 18 перемещается в рабочее положение, при этом упор 17 охватывает 10 головку детали 9, находящейся в ложементе маятникового передающего блока по окружности, а заготовка прижимается к заплечикам 33.
такта с базовой площадкой 14, под действием силы тяжести поворачивается в вертикальное положение и вместе с ползуш- кой 6 возвращается в исходное положение. При возвращении устройства в исходное положение упор 17, перемещаясь в нерабочее положение, освобождает деталь 9 вследствие воздействия регулируемого упора 24 на рычаг 20. После этого цикл повторяется.
Формула изобретения
Загрузочное устройство для промышленного робота, содержащее основание и смон- По команде соответствующих датчиков is тированный на нем подводящий лоток, схват 37 робота, который обслуживает данное устройство, захватывает стержень детали 9, а ползущка 6 опускается в результате перемещения рейки 28 пневмоцилиндра 8. Опускающаяся ползушка 6 пеползушку, установленную с возможностью возвратно-поступательного перемещения в вертикальной плоскости, маятниковый передающий блок с ложементом для детали и привод, отличающееся тем, что, с целью
ремещает вниз передний блок 7 относи- 20 расщирения функциональных возможностей, тельно неподвижной детали 9, которая при оно снабжено базовой площадкой, смонти- этом находится в схвате робота и контактирует с упором 17. В результате перемещения блока 7 створка 32, скользя по поверхности головки неподвижной детали 9, 25 раскрывается, сжимая соответствующую пружину. Этим объясняется устранение воздействия изгибающего момента на схват робота при возвращении маятникового передающего блока 7 в исходное положение. Продолжая движение вниз, передающий зо ностью взаимодействия с базовой площад- блок 7, когда ролики 3.1 выйдут из кон- кой.
рованной на основании и подпружиненном упором, установленным на ней с возможностью взаимодействия с ползушкой, расположенной на дополнительно введенных в устройство скалках, кинематически связанных с приводом, при этом маятниковый передающий блок снабжен подпружиненной створкой для прижима детали в ложементе и роликами, установленными с возможтакта с базовой площадкой 14, под действием силы тяжести поворачивается в вертикальное положение и вместе с ползуш- кой 6 возвращается в исходное положение. При возвращении устройства в исходное положение упор 17, перемещаясь в нерабочее положение, освобождает деталь 9 вследствие воздействия регулируемого упора 24 на рычаг 20. После этого цикл повторяется.
Формула изобретения
расщирения функциональных возможностей, оно снабжено базовой площадкой, смонти- ностью взаимодействия с базовой площад- кой.
рованной на основании и подпружиненном упором, установленным на ней с возможностью взаимодействия с ползушкой, расположенной на дополнительно введенных в устройство скалках, кинематически связанных с приводом, при этом маятниковый передающий блок снабжен подпружиненной створкой для прижима детали в ложементе и роликами, установленными с возможфиг. I
Видб
35 53 32
ХЛ5/
J
97/гг.З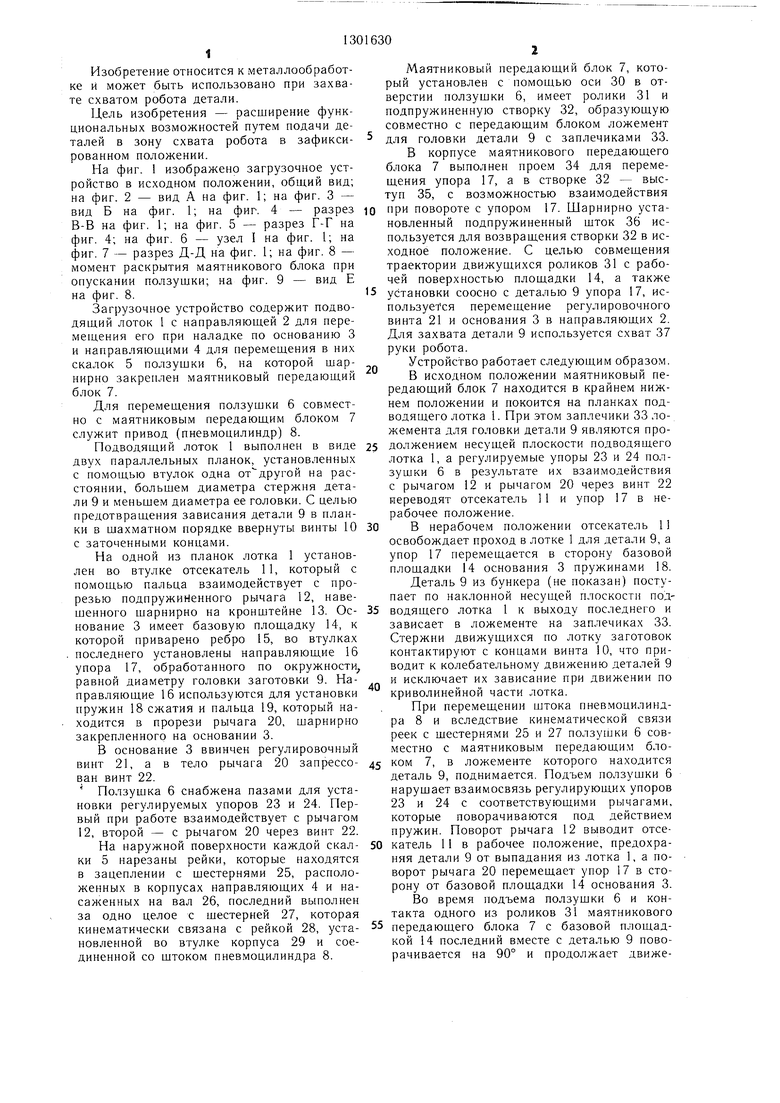

| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАГРУЗОЧНОЕ УСТРОЙСТВОВПТ Бт^ ^т^ш | 1972 |
|
SU418305A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Загрузочное устройство | 1986 |
|
SU1397245A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1973 |
|
SU381497A1 |
| Автомат для запрессовки | 1981 |
|
SU994195A1 |
| Автоматизированный комплекс горячей штамповки | 1988 |
|
SU1602602A1 |
| Штамп для штамповки деталей | 1983 |
|
SU1123787A2 |
| Устройство для ориентирования деталей | 1978 |
|
SU751574A1 |
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
| Автомат для сборки хомута из ленты | 1972 |
|
SU562358A1 |
Изобретение относится к металлообработке и может быть использовано при захвате схватом робота детали. Целью изобретения является расширение функциональных возможностей путем подачи деталей в зону схвата робота в зафиксированном положении. Деталь 9 из подающего лотка поступает на заплечики 33 ложемента маятникового передающего блока 7. При перемещении штока пневмоцилиндра и наличии кинематической связи реек с шестернями ползушка 6 с маятниковым передающим блоком 7, в ложементе которого находится деталь 9, поднимается. Во время подъема ползушки 6 и контакта одного из роликов 3 маятникового передающего блока 7 с базовой площадкой 14 передающий блок 7 поворачивается на 90° и продолжает движение до соприкосновения с винтом 21. По команде соответствующих роликов схват робота захватывает деталь 9, а ползушка 6 опускается, при этом створка, скользя по детали 9, раскрывается, сжимая соответствующую пружину. Продолжая движение вниз, ролики 31 выходят из контакта с базовой площадкой 14, и под действием силы тяжести маятниковый передающий блок поворачивается в исходное положение. 9 ил. (Л Вид А гг со О5 00 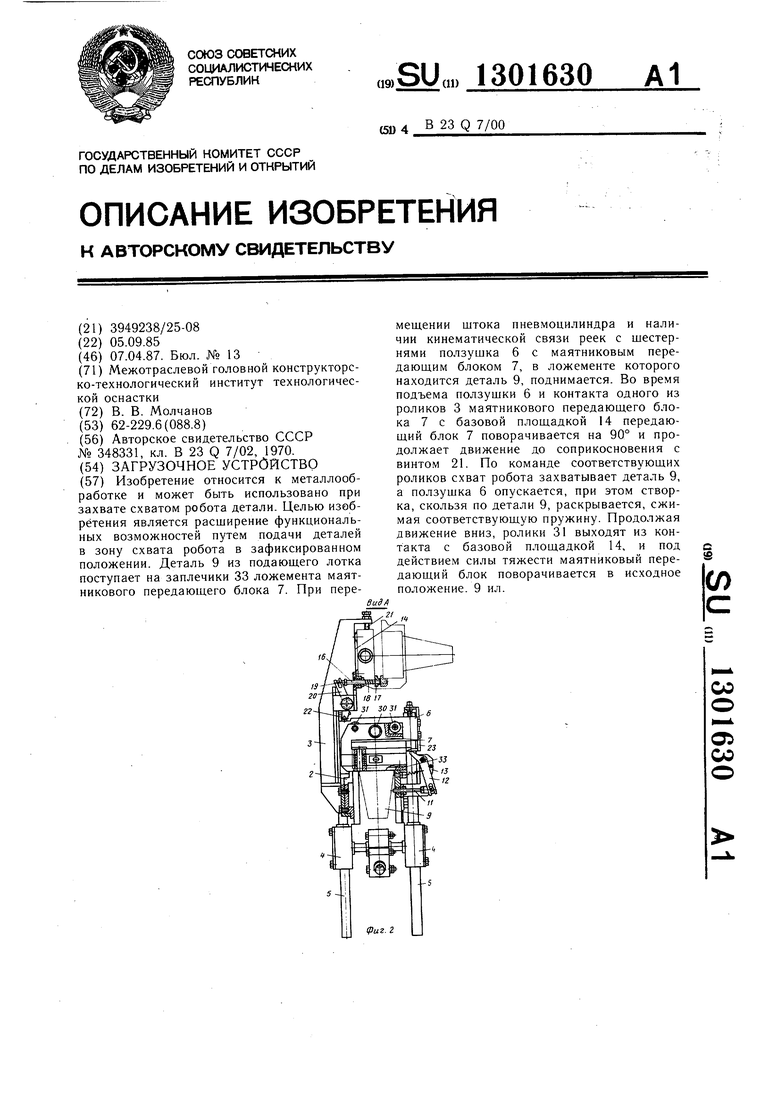
б-б
ФигМ
Г-Г
27
А -А
(Риг.б
фиг. 7
15
ВидЕ
VU2.9
Редактор Н. Рогулич Заказ 927/16
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Составитель И. Щивьев
Техред И. ВересКорректор Л. Пилипенко
Тираж 787Подписное
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 0 |
|
SU348331A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
