6-6
i29i617 S 1S25 W 27 9 3
2д 6
i
ч Ч/ ч ч ЧЧгч ЧЧУ Ч)
u/vj
ч Ч 1 У1 X у j .
,
)Л УУ///У//// 7
12 11
л/////////////////.
13
9 3
2д 6
i
Ч/ ч ч ЧЧгч ЧЧУ Ч)
ч Ч 1 У1 X у j .
/У//// 7
со
ОЭ О5 Ч
Фие.З
Изобретение относится к машиностроение и может быть использовано в автоматических линиях мерной резки материала.
Цель изобретения - расширение технологических возможностей путем обеспечения сброса обработанного изделия и расширения его типоразмеров„
На фиг 1 изображено приемное устройство общий вид на фиг,2 - ;вид А на фиг,1; на фиг,3 - разрез Б-Б на на фиг.А - разрез В-В на фиг„to
Приемное устройство содержит ос- |нование 1 приемный механизм 2 с Iприводом, Приемньй механизм вьтол- :нен в виде приемной пло1ца;тки 3 При- :вод приемной площадки выполнен в виде силового цилиндра А,, шток 5 которого ;посредством кронштейнов 6 прикреплен к приемной плoIl1;a ,кe 3 В основании 1 установлены два фланца 7 и Sj : связанные между собой направляющей скалкой 9 о
Корпус 10 силового 1гига-шдра 4 же- ;стко соединен с валом 11, установ- ленным в отверстии фланца 7, Вал 11 оснащен гайкаЬ Ш 12 и 13 для ограни- .чения его осевого перемещенияо Флане 7 и вал 11 зафиксированы от взаимног проворотад например профильным соединением „ На валу 11 закреплен ползун .14р установленный с возможностью взаимодействия с направляющим пазом 15, выполненньм в основании К Во флан- це 7 выполнено отверстие с пальцем 16,, а в основании 1 - отверстие с фиксатором 17 и пpy5Ia:iнoй 18,
Подвшкная площадка 2 оснащена постоянными 19 и перемещающимися 20 ограждениями. Перемещающиеся ограждени выполнены в виде рычагов 21 и 22,соединенных собой ограничительной планкой 23 Рычаг 22 выполнен с ко- пирной поверхностью :я установлен с возможностью взаимодействия с роликом 245 закрепленном на приемной площадке 2,
На приамной пло1ца,чке 2 установлен подпруэкиненньй упор 25 (пружина не показана) с возможностью взаимодействия, с круговым копЕяром 26 J закрепленном на основании 1 На приемной площадке смонтированы плита 27э ох- ватьшающая направляюш,ую скалку 9, а в кронштейне 6 имеется винт 28j ограничив аюнрш дв1-ся;ение приемной площадки 2з подвюкный ограничивающий
5 0 5
5
0 5
0
0
5
упор 29, установленные с возможностью взаимодействия с ними датчики 30 управления. Подвижньй упор 29 устанавливается на нужньй размер перемещением его по площадке 2 с последующим зал атием винтами 31, Приемное устройство устанавливается к оборудованию- 32, обеспечивающему резку материала. Сбоку устройства устанавливается тара 33,
Устройство работает следуюп1им образом.
Перед началом работы площадка 3 находится в крайнем правом положении. Фланец 7, а вместе с ним площадка 3 зафиксированы от поворота фиксатором 17о Приемная площадка 3 свободна. Подающее устройство (не показано) подает материал через зону резания на приемную площадку 3 до упора 29.Срабатывает датчик 30, давая команду на прекращение подачи и на начало цикла резания.
После отрезки детали рабочая среда подается в штоковую полость цилиндра 4 приемного устройства. Площадка 3 вместе с деталью перемещаются влево до упора плиты 27 во фланец 7. При этом рычаг 22, перекатьшаясь по ролику 24, опускается вместе с ограничительной планкой 23 рычагом 21, а плита 27 утапливает палец 16, который, в свою очередь, выжимает фиксатор 17 из отверстия фланца 7, а под- пружиненнБй упор 25 заскакивает на круговой копир 26.
Таким образом, фланец 7 вместе с фланцем 8 и площадкой 3 освобождаются для поворота. При продолжении подачи рабочей, среды в штоковую полость начинается движение корпуса 10 цилиндра 4 и вала 11 с ползуном 14, которьм при этом скользит по направ- ляющим 15, вызывая поворот фланца 7, а вместе с ним и площадки 3, Движение корпуса цилиндра 4 вместе с ва- лом 11, а следовательно, и поворот, продолжаются до упора гаек 12 во фланец 7. При повороте упор 25 сходит с копира 26, защелкивая площадку 3 за фланец 7. В конце поворота на угол сб деталь соскальзывает с площадки 3 в тару 33.
Затем рабочая среда подается в бесштоковую полость 1щлиндра 4, и так как движению площадки 3 препятствует упор 25, начинаются обратное движение корпуса цилиндра 4 вместе с
31
валом 11 и обратный поворот фланцев 7 и 8 вместе с площадкой 3, Движение продолжается до упора гаек 13 во фланец 7. При этом упор 25,. скользя по копиру 26, освобождает площадку 3 и начинается движение ее по направляющей скалке 9 до упора винта 28 во фланец 8. Как только плита 27 отходит от фланца 7, фиксатор 17 под действием пружины 18 заскакивает в отверстие фланца 7, выжимая частично оттуда палец 16. Таким образом, приемное устройство возвращается в исходное положение. Далее цикл работы устройства повторяется.
Применение предлагаемого устройства в линиях мерной резки материала позволяет: расширить технологические возможности линии.
Формула изобретения
Приемное устройство преимущественно для мерной резки материала, со-25 держащее смонтированный на основании
0
5
0
5
671 .4
приемньй механизм с приводом и подвижный ограничивающий-упор, отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения сброса обработанного изделия и расширения его типоразмеров, приемньш механизм выполнен в виде приемной площадки, привод вьтолнен в виде силового цилиндра, шток которого соединен с приемной площадкой, а корпус установлен на основании с возможностью осевого и вращательного движения и оснащен ползуном, основание снабжено напраЬляющим пазом для ползуна силового цилиндра и круговым копиром, приемная площадка оснащена ограждениями и подпружиненным упором, смонтированным с возможностью взаимодей- ствия с круговым копиром основания, при этом устройство снабжено датчиком управления, установленным на приемной площадке с возможностью взаимодействия с подвижным ограничивающим упором.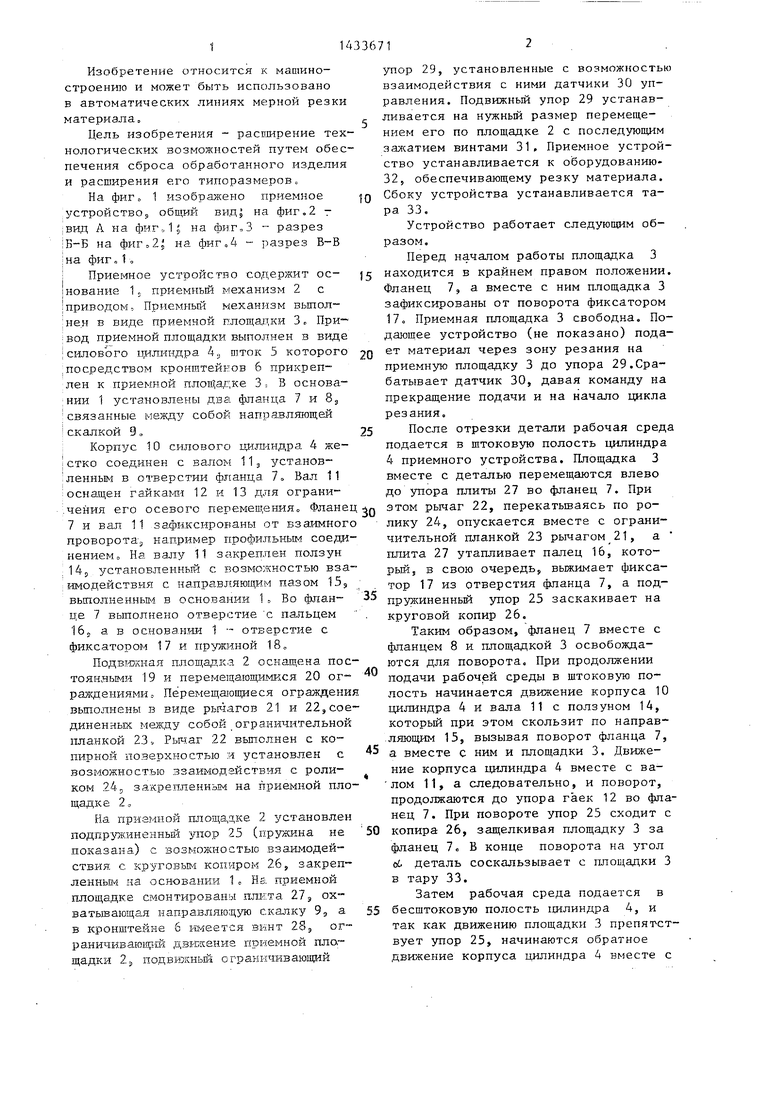

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Стержневое устройство | 1980 |
|
SU908507A1 |
| УСТРОЙСТВО для УПАКОВКИ СТЕРЖНЕОВРАЗНЫХ ИЗДЕЛИЙ | 1973 |
|
SU369067A1 |
| МАШИНА ДЛЯ ФОРМОВАНИЯ КОЛЬЦЕОБРАЗНЫХ ТЕСТОВЫХ ЗАГОТОВОК | 1966 |
|
SU212902A1 |
| Автомат для упаковывания предметов в сетчатый рукав | 1988 |
|
SU1634576A1 |
| Устройство для автоматической смены инструмента | 1988 |
|
SU1701474A1 |
| Машина для укладки штучных изделий в коробки | 1972 |
|
SU445597A1 |
| Способ резки тонкостенных труб и устройство для его осуществления | 1990 |
|
SU1775239A1 |
| Автомат для электрохимического снятия заусенцев | 1973 |
|
SU492370A1 |
| Кантователь | 1973 |
|
SU510285A1 |

Изобретение относится к области машиностроения и может быть использовано в автоматических линиях мерной резки материала. Цель изобретения - расширение технологических возможностей. Материал подают от оборудования до упора 29. Срабатьшает датчик 30, начинается цикл резания. После отрезки детали рабочая среда подается в штоковую полость цилиндра 4 и площадка 3 вместе с деталью перемещает ся до упора плиты 27 во фланец 7. При этом опускается перемещающееся ограждение. Подпружиненный упор 25 заскакивает на копир 26. При продолжении подачи рабочей среды в штоко- вую полость начинается движение корпуса 10 цилиндра 4, что вызьюает поворот площадки 3. Поворот продолжается до упора гаек 12 во фланец 7. При этом упор 25 сходит с копира 26, защелкивая площадку 3 за фланец 7. В конце поворота деталь соскальзьшает в тару. 4 ил. to
30
25 73 21 Ю 23 2 5 6 2 22
/ /,/,///
/ / / .-r-g / /
Фиг. 7
фиг. 2
В ид А
33
| Линия резки труб | 1984 |
|
SU1201078A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
