Изобретение относится к машиностроению и может быть использовано в устройствах, где необходимо преобразование вращательного движения ведущего звена в возвратно-поступательное движение ведомого звена с точным выстоем в одном из его крайних положений в течение полуоборота ведущего звена.
Цель изобретения - повышение надежности за счет обеспечения точного выстоя ведомого звена.
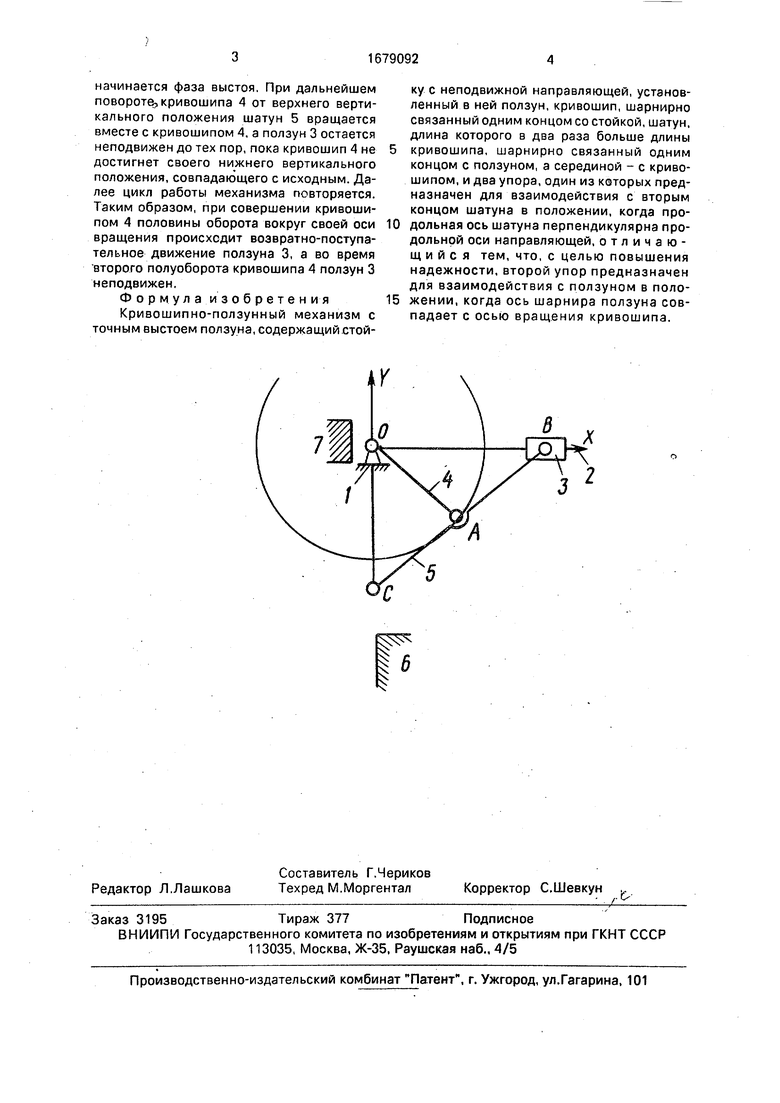
На чертеже показана кинематическая схема механизма.
Кривошипно-ползунный механизм с точным выстоем ползуна содержит стойку 1 с неподвижной направляющей 2, установленный в ней ползун 3, кривошип 4, шарнир- но связанный одним концом со стойкой 1, шатун 5, длина которого в два раза больше длины кривошипа 4, шарнирно связанный одним концом с пблзуном 3, а серединой - с кривошипом 4, упор 6, предназначенный
для взаимодействия со вторым концом шатуна 5 в положении, когда продольная ось шатуна 5 перпендикулярна продольной оси направляющей 2, второй упор 7, предназначенный для взаимодействия с ползуном 3 в положении, когда ось шарнира ползуна 3 совпадает с осью вращения кривошипа 4.
Механизм работает следующим образом.
При вращении кривошипа 4 против часовой стрелки от нижнего вертикального положения свободный конец шатуна 5 упирается в упор 6, выводя, тем самым, ползун 3 из положения выстоя. При повороте кривошипа 4 на угол 90° от нижнего вертикального положения ползун 3 занимает крайнее правое положение и при дальнейшем повороте кривошипа 4 начинает движение в обратном направлении. При повороте кривошипа 4 на угол 180° шатун 5 поднимается вверх, занимает вертикальное положение, а ползун 3 упирается в упор 7, и
о ч
ю
ю
го
начинается фаза выстоя. При дальнейшем повороте, кривошипа 4 от верхнего вертикального положения шатун 5 вращается вместе с кривошипом 4, а ползун 3 остается неподвижен до тех пор, пока кривошип 4 не достигнет своего нижнего вертикального положения, совпадающего с исходным. Далее цикл работы механизма повторяется. Таким образом, при совершении кривошипом 4 половины оборота вокруг своей оси вращения происходит возвратно-поступательное движение ползуна 3, а во время второго полуоборота кривошипа 4 ползун 3 неподвижен.
Формула изобретения Кривошипно-ползунный механизм с точным выстоем ползуна, содержащий стой0
5
ку с неподвижной направляющей, установленный в ней ползун, кривошип, шарнирно связанный одним концом со стойкой, шатун, длина которого в два раза больше длины кривошипа, шарнирно связанный одним концом с ползуном, а серединой - с кривошипом, и два упора, один из которых предназначен для взаимодействия с вторым концом шатуна в положении, когда продольная ось шатуна перпендикулярна продольной оси направляющей, отличающийся тем, что, с целью повышения надежности, второй упор предназначен для взаимодействия с ползуном в положении, когда ось шарнира ползуна совпадает с осью вращения кривошипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Кривошипно-ползунный механизм | 1986 |
|
SU1364798A1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1421923A1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| Кривошипно-кулисный механизм с выстоем ведомого звена | 1988 |
|
SU1504433A1 |
| Кривошипно-ползунный механизм с остановками | 1987 |
|
SU1434201A1 |
| Рычажный механизм с выстоем | 1986 |
|
SU1379534A1 |
| Кривошипно-ползунный механизм | 1986 |
|
SU1330379A1 |
| Кривошипно-кулисный передаточный механизм с выстоем | 1990 |
|
SU1793136A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1990 |
|
RU2017038C1 |
Изобретение относится к машиностроению и может быть использовано в устройствах, где необходимо преобразование вращательного движения ведущего звена в возвратно-поступательное движение ведомого звена с точным выстоем в одном из его крайних положений в течение полуоборота ведущего звена, Цель изобретения - повышение надежности за счет обеспечения точного выстоя ведомого звена. При совершении кривошипом 4 половины оборота вокруг своей оси вращения происходит возвратно-поступательное движение ползуна 3, а во время второго полуоборота кривошипа 4 ползун 3 неподвижен. 1 ил.
w$K
Iе
| Артоболевский И.И | |||
| Механизмы в современной технике, т.П, 1971, с | |||
| Автоматический сцепной прибор | 1921 |
|
SU449A1 |
