Изобретение относится к автоматике и вычислительной тех1гике и может быть использовано в металлорежущих станкахJ координатных измерительных машинах и других технических средствах, оснащенных преобразователями с периодической структурой.
Целью изобретения является повышение быстродействия и надежности интерполятора.
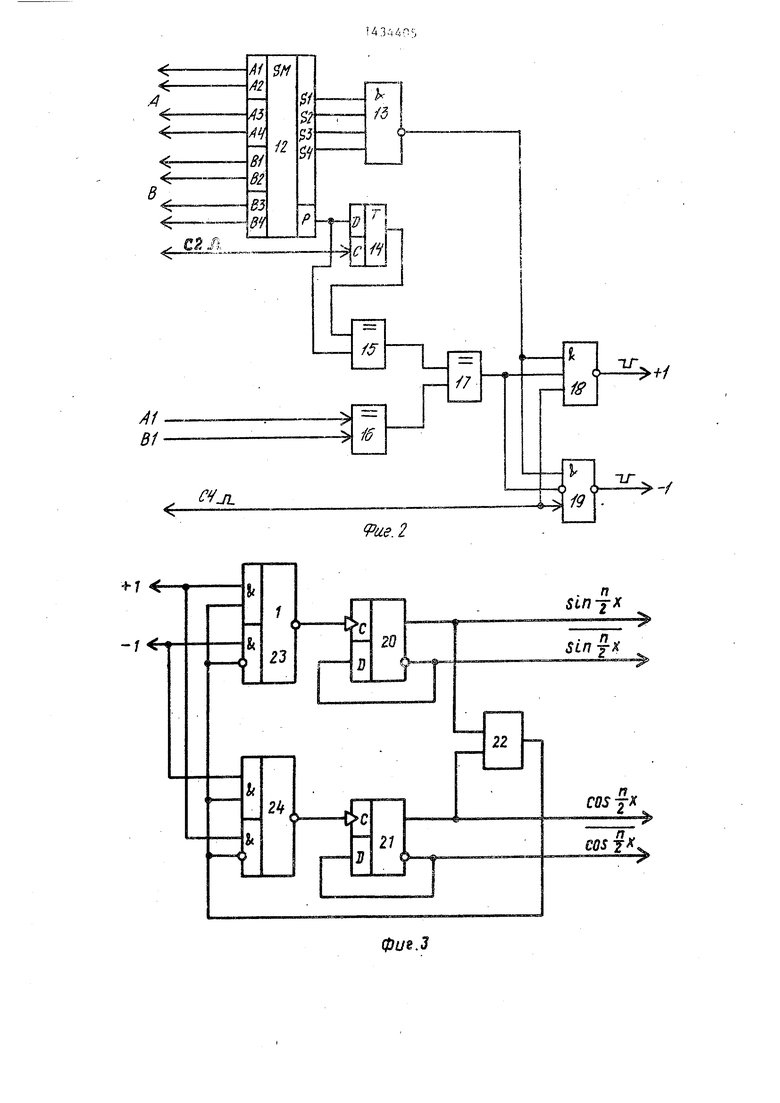
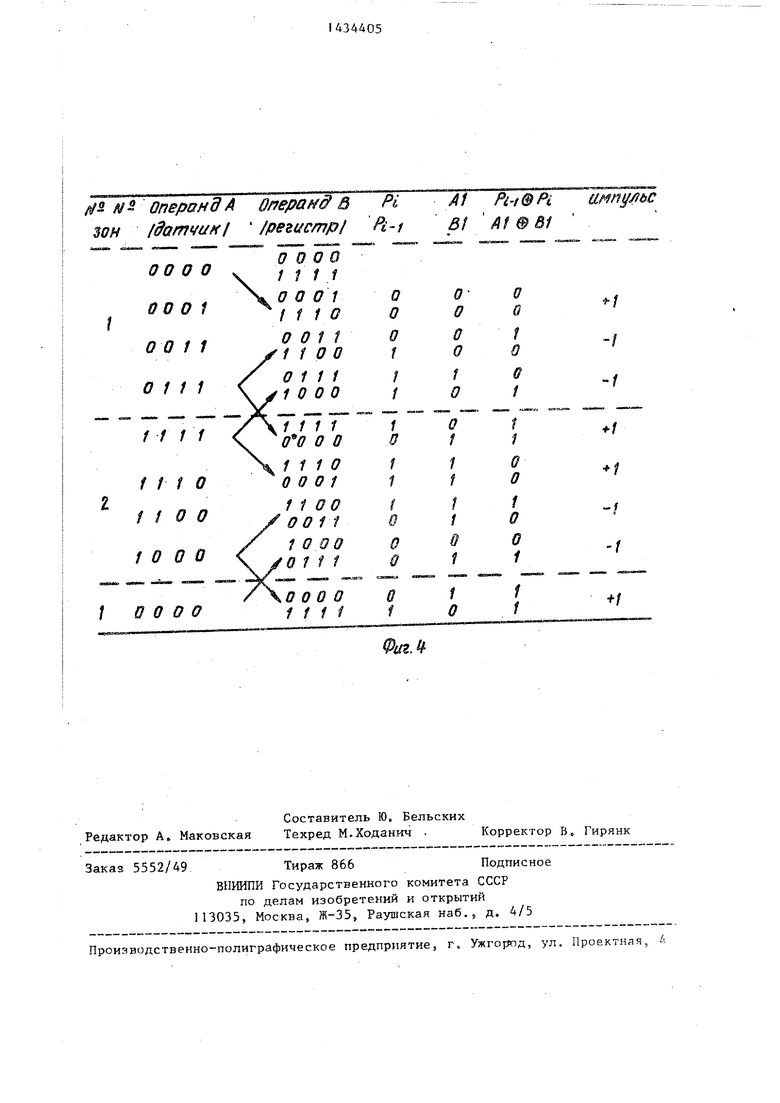
На фиг. 1 изображен описываемый интерполятор на фиг 2 - формирователь выходных сигналов; на фиг. 3- формирователь унифицированных сигналов на фиг. 4 - таблица, характеризующая логику формирования выходных: сигналов,
Интерполятор (фиг. 1) содержит кольцевой резистивный фазовращаювз й мост 1, группу компараторов 2, число п которых равно числу интервалов делений половины шага периодической структуры, буфериьй регистр 3 на п бит, кольцевой реверсивный сдвиговый регистр 4, формирователь 5 выходньк сигналов и формирователь 6 йрямо- угольных сигналов, тактирующий генератор 7, формирователь 8 строб-сигналов, первый 9 и второй 10 инверторы; группу управляемых инверторов 1 и сумматор 12,
Формирователь 5 выходных сигналов (фиг, 2) содержит пкрвый элемент 13j триггер lAj первый 15, второй 16, третий 7 элементы сравнения второй 18 и третий 19 элементы И--НЕ,
Формирователь 6 прямоугольных сигналов (фиг с 3) содержит первый 20 и второй 21 триггеры, элемент 22 сравнения, первый 23 и второй 24 элементы И-ИЛИ-НЕ.
Интерполятор работает следующим образом
Сигналы растрового измерительного преобразователя, соответствующие функциям sin к, cos X, -sinx и -cos х, поступают на предварительный усилитель (не показан)и усиливаются им. Усиленные сигнады поступают на диаго .кали кольцевого резистивного фазо- вращающего моста I (фиг„ i), С соответствующих точек кольцевого резистивного фазовращающего моста сни- .кают напряжения, пропорпиональные sin(x + o()/sin(x + flO/5 sin(x -f 2c) и т,д,, где c( угол поворота фазы сигнала, соответствующий 1/п-й доле шага растра.
0
5
0
5
0
5
0
5
0
5
Эти сигналы поступают на группу компараторов 2, где преобразуются в прямоугольные импульсы (меандры), сдвинутые один относительно другого на угол с/ .
Для управления циклом работы интерполятора служат генератор 7 и формирователь 8 строб-сигналов, выдающий четыре последовательности стробов С1-С4, По первому стробу буферный регистр 3 запоминается состояние всех компараторовр принадлежащих 5 руппе.2. По второму стробу запоминается значение переноса, возникающее в сумматоре 12 вследствие сложения операндов В и А, По третьему стробу инвертируется операнд В, а по четвертому выполняется анализ признаков и формируются управляю1 ще сигналы tlj используемые для управления кольцевым реверсивным сдвиговым регистром 4 и формировання выходных сигналов,
В статическом состоянии значение .- всех битов кольцевого реверсивного сдвигового регистра 4 совпадает со значением соответствующих битов буферного регистра 3, При таком состоянии значение суммы S во втором цикле суммирования (S А + В) соответствует полному набору единиц (значению , в дополнительном коде S -1), что запрещает (фиг. 2) выдачу сигналов ti. Если вследствие изменения состояния ч датчика содержание буферного регистра 3 не соответствует содержанию кольцевого сдвига регистра 4, то условие S -1 не соблюдается и выдача импульсов разрешена.
Логику формирования выходных сигналов можно проследить по таблице - (фиг, 4), где на примере четырехбнто- вого интерполятора -(деление шага на восемь частей) указаны значения сигналов датчика (операнд А) и кольцевого сдвигового регистра (операнд В). Значения операнда В представлены как в прямом, так и в инверсном кодах, .Все поле возможных значений операндов можно представить в виде двух зон, В первой зоне значения операндов начинаются с нулей, во второй - с единиц.
Логика образования выходных сигналов может быть представлена следующим равенством:
+1
7. Возврат из первой зоны во вто
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой линейный интерполятор | 1989 |
|
SU1693592A1 |
| Устройство для решения систем линейных алгебраических уравнений | 1985 |
|
SU1370656A1 |
| Устройство для программного управления шаговым двигателем | 1989 |
|
SU1675850A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 1991 |
|
RU2032265C1 |
| Линейный интерполятор для систем интерактивной графики | 1988 |
|
SU1608691A1 |
| Устройство для обнаружения отказов в шаговом электроприводе | 1988 |
|
SU1511843A1 |
| Устройство аналого-цифрового преобразования узкополосных сигналов | 1984 |
|
SU1225014A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Устройство для сопряжения между абонентами | 1987 |
|
SU1411759A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в металлорежущих станках, координатных измерительf ньпс машинах и других технических средствах, снабженных преобразобате- лями с периодической структурой. Цель изобретения - повьшение быстродействия и надежности интерполятора. Поставленная цепь достигается тем, что в интерполятор, содержащий ре- зистивный фазовращающий мост 1, группу компараторов 2 и буферный регистр 3, введены кольцевой реверсивный дви- говый регистр 4, формирователи 5 и 6 выходных и прямоугольных сигналов, генератор сигналов 7, формирователь строб-сигналов 8, первый 9 и второй 10 инверторы, группа инверторов 11: и сумматор 12. Интерполятор обеспечивает высокое быстродействие и нечувствительность к коротким помехам и флуктуации входных сигналов. 2 з.п. ф-лы, 4 ил.
7, (Pj, ® P;) © (Al ©Bl)
l- -1
10
При работе интерполятора возможны восемь логических ситуаций, четыре из которых связаны с переходами внутри каждой из зон, а другие четыре - с переходами из зоны в зону. Число ситуаций не зависит от числа делений шага растра, что позволяет строить по такой схеме интерполяторы с делением шага не только на восемь, но также на 20,40 и более частей.
Ситуации, возникающие при переходах, рассмотрены в последовательности их размещения в таблице.
В этом случае ни первое, ни второе сложения не дают переноса, а старшие разряды А1 и В1 операндов равны нулю. Результат логической операции: 25
Z (О ® 0) О (О ® 0) О ® О О,
что вызьтает появление импульса +1.
20
15
30
;., 1; Р 0; А1 В1 0;
Z (1 © 0) ® (А1 Ф В1) 1®0
что вызьшает импульс -1.
Р.1 1; Pi I; А1 I; В1 0; Z (1®1)®(1®0). 0@1
что вызывает импульс -I.
Р;., 1; Р; 0; А1 0; В1 1; Z (1 ® 0) О (О® 1) 1 ® 1 0,
вырабатьгеается импульс +1 .
1: А1
В 1 ;
1) ОФС О
-,.. 1; р
Z ( 1 О 1) 0 (1
в результате поступает импульс +1. 6. Переход внутри второй зоны в сторону уменьшения размера.
0; А1 РЛ 1;
О
р. 1 .
« 1
Z (1 (5 0) ® (1 ® 1) 1
вырабатывается импульс -1.
рую.
Р,--1 0; Р , 0; А1 О; В1
I;
поступает импульс -.
Pi-, 0; Pi 1; Al 1; Bl 0; . (О ® О @ (1 ©0) 1®1 О,
5
0
5
0
5
5 поступает импульс -i-l.
Импульсы -t-l управляют движением информации в кольцевом сдвиговом регистре, смещая ее на один шаг в соответствующую сторону. Если рассогласование равно одному шагу, то восстанавливается равновесие (S -1) и дальнейшее смещение прекращается. Если возникно рассогласование более чем на один шаг, то вьщается последовательно несколько импульсов +1 (или -1) до тех пор, пока не будет достигнуто равновесие (сигналы +1 для кольцевого реверсивного сдвигово- го регистра обеспечивают обратную 0 связь).
Бит информации, вытолкнутый из сдвигового регистра 4, инвертируется инверторами 9 и 10, что печивает при перемещениях смену зна ка информации (переход из зоны в зону).
В зависимости от структуры отсчет- ных частей преобразователей информации выходные сигналы могут быть использованы как в форме сигналов t1 так и в форме унифицированных сигналов (меандров), имеющих синусную или косинусную фазу и превьш1ающих по частоте входной сигнал в п/2 раз. Формирование таких сигналов выполняется на двух триггерах 20 и 21 (фиг. 3), элементе 22 сравнения и двух- элементах И-ИЛИ-НЕ 23 и 24.
Интерполятор обеспечивает высокое 0 быстродействие (до 1 мГц по сигналам ±1) и нечувствителен к коротким помехам и флуктуации входных сигналов. Если вследствие этих причин происходит заброс сигналов датчика, 5 то он ликвидируется в течение нескольких циклов работы интерполятора, причем частота импульсов на регистрирующую часть определяется частотой генератора и не зависит от величины
заброса о Это позволяет надежно регистрировать даже скачкообразные изменения входной величины.
Формула изобретения
1, Интерполятор шага периодической структуры, содержащий кольцевой резистивный фазовращашпщй MocTs группу компараторов, буфёряьй регистр, выходы кольцевого резистивного фазо- вращающего моста подключены к входам компараторов группы, выходы которых подключены к информационным входам буферного регистра, отличающийся тем, что, с целью повышения быстродействия и надежности интерполятора, в него введены кольцевой реверсивньш сдвиговый регистр, формирователь выходных сигналов, фор мяров-атель прямоугольных сигналов, тактирующий генератор, формирователь строб-импульсов 5 первый и второй инверторы, сумматор и группа управляемых инверторовJ причем выход тактирующего генератора подключен к управляющему входу формирователя строб-импульсоз, первый выход которо го подключен к управляющему входу буферного регистра, второй выход .к первому управляющему входу формирователя выходных сигналов, третий выход - к управляющему входу группы управляемых инверторов,, а четвартый выход - к Ёторому управляющему входу формирователя выходных сигналовj информационные входы которого подключены к информационным выходам сумматора, первый и второй информационные входы - соответственно к первым выходам кольцевого реверсивного сдвигового регистра и буферного регистра, а третий информационный вход - к выход переноса сумматора, первый и второй управляющие выходы формирователя выходных сигналов подключены соответственно к первому и второму упраВ ляющим входам формирователя прямоугольных сигналов и кольцевого резис .тивного сдвигового регистра, выходы которого подключены к входам инверторов группы, выходы которых соединены с входами первой группы сумматора, входы второй г руппы которого
0
5
5
0
5
0
подклк1че.яь к выходам буферного рег и- cTpaj первый и последний выходы кольцевого реверсивного сдвигового регистра подключены соответственно к входам первого и второго инверторов, соединенных-выходами соответственно с третьим и четвертым управляющими входами кольцевого реверсивного сдвигового регистра,
2,Интерполятор по п„ Ij о т л и - чающийс я тем, что ватель выходных сигналов содержит первый, второй и третий элементы И-НЕ, триггер, первый, второй и третий элементы сравнения, причем первый и второй управляющие входы формирователя соответственно подключены к синхровходу триггера и первым входам второго и третьего элементов И-НЕ, информационные входы группы формирователя подключены к входам первого элемента И-НЕ.; выход которого соединен с вторьии входами второго и третьего элементов И-НЕ, третьи входы которых подключены к выходу третьего элемента сравнения, входами подключенного к выходам первого и второго элементов сравненияj входы второго элемента сравнения являются, соответственно первым и вторым инфор-- маиио гны -1и входами формирователя, . третий информационный вход формирователя подключен к D-входу триггера и первому входу первого элемента сравнения, второй вход которого соединен с выходом триггера.
3,Интерполятор по п. 1, отличающийся тем,, что формирователь прямоугольных сигналов содержит первый и второй триггеры, элемент сравнения5 первый и второй элементы И-ИЛИ-НЕ, причем первый и второй управляющее входы фор дарователя подключены соответственно к первым и вторым входам элементов И ИЛИ-НЕ, выходы которых подключены соответственно к синхровходам первого и второго триггеров, D-входы которых
«соединены с собственными инверсными выходамиэ а прямые выходы подключены к первому и второму входам элемента сравнени.я, выход которого подключен к третьим и четвертым входам первого и второго элементов И-ИЛИ-НЕ,
C&i/f.J
ФагЛ
| Растровый интерполятор | 1978 |
|
SU769492A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Фотоэлектрические преобразователи информации | |||
| Под ред | |||
| Пресну- хина Л.Н | |||
| М.: Машиностроение, 1974, с | |||
| Устройство непрерывного автоматического тормоза с сжатым воздухом | 1921 |
|
SU191A1 |
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
| Затвор для дверей холодильных камер | 1920 |
|
SU182A1 |
| Экономайзер | 0 |
|
SU94A1 |
