ел j
о со со
Изобретение относится к машиностроению в частности к конструкции систем управления прессовым оборудованием.
Целью изобретения является повышение производительности ковки за счет увеличения быстродействия сервопривода.
На чертеже представлена структурная схема сервопривода кулачкового вала гидравлического пресса.
Сервопривод содержит последовательно соединенные сумматор J, усилитель 2 мощ- ности, электромеханический преобразователь 3, гидроусилитель 4, силовой гидроцилиндр 5, связанный с кулачковым валом, который соединен через датчик 6 положения с первым входом сумматора 1, диф- ференцирующее устройство 7, дополнительный сумматор 8 и датчик 9 давлейия. При этом дополнительный сумматор 8 соединен первым входом с выходом дифференцирующего устройства 7, связанного своим входом с выходом датчика 6 поло- жения, другим входом - с выходом датчика 9 давления, соединенного с полостями силового гидроцилиндра 5, а выходом - с вторым входом сумматора 1.
Сервопривод работает следующим образом.
Сигнал рассогласования, пропорциональный углу поворота кулачкового вала, поступает на третий вход сумматора 1, суммируется с сигналами, пришедшими с выходов датчика 6 положения и дополни- тельного сумматора 8, усиливается усилителем 2 мощности и поступает на вход электромеханического преобразователя 3, воздействующего на входной шток гидроусилителя 4, подающего рабочую жидкость в полость силового гидроцилиндра 5. Последний поворачивает кулачковый вал в заданное положение. При этом дополнительный сумматор 8 из сигнала, пропорционального перепаду давлений, поступающему с выхода датчика 9 давления, вычитает сигнал, пропорциональный инерцион- ной составляющей (ускорению) подвижных частей сервопривода, определяющий погрешность в цепи коррекции по перепаду давлений, поступающий с выхода дифференцирующего устройства 7, т. е. увеличение позиционной нагрузки на выходном штоке силового гидроцилиндра 5, приводящее к уменьшению скорости переме
5 0
5
п 0
5
щения его штока, приведет к увеличению перепада давлений в его полостях и увеличению сигнала на выходе датчика 9 давления. При этом сигнал на выходе датчика 9 давления определяется позиционной нагрузкой на штоке силового гидроцилиндра 5 и инерционной составляющей подвижных частей сервопривода, причем последняя составляющая приводит к погрешности при осуществлении коррекции по позиционной нагрузке на штоке силового гидроцилиндра 5. Дополнительный сумматор 8 вычитает из сигнала, поступающего с выхода датчика 9 давления, сигнал, пропорциональный инерционной составляющей сервопривода. Полученный сигнал поступает с выхода дополнительного сумматора 8 на второй вход сумматора 1, что приводит к дополнительному открытию гидроусилителя 4 и поддержанию скорости перемещения штока силового гидроцилиндра 5 вне зависимости от величины позиционной нагрузки. При достижении валом заданного положения позиционирования по команде датчика 6 положения сигнал на выходе сумматора 1 станет равен нулю и силовой гидроцилиндр 5 остановит кулачковый вал в заданном положении.
Формула изобретения
Сервопривод кулачкового вала гидравлического пресса, содержащий последовательно соединенные сумматор, усилитель мощности, электромеханический преобразователь, гидроусилитель и силовой гидроцилиндр, связанный с кулачковым валом, который соединен с датчиком положения, подключенным к одному из входов сумматора, отличающийся тем, что, с целью повышения производительности ковки за счет увеличения быстродействия, сервопривод снабжен дифференцирующим устройством, дополнительным сумматором и датчиком давления, соединенным с полостями силового гидроцилиндра, причем первый вход дополнительного сумматора связан через дифференцирующее устройство с выходом датчика положения, второй вход дополнительного сумматора соединен с выходом датчика давления, а выход - с другим входом сумматора.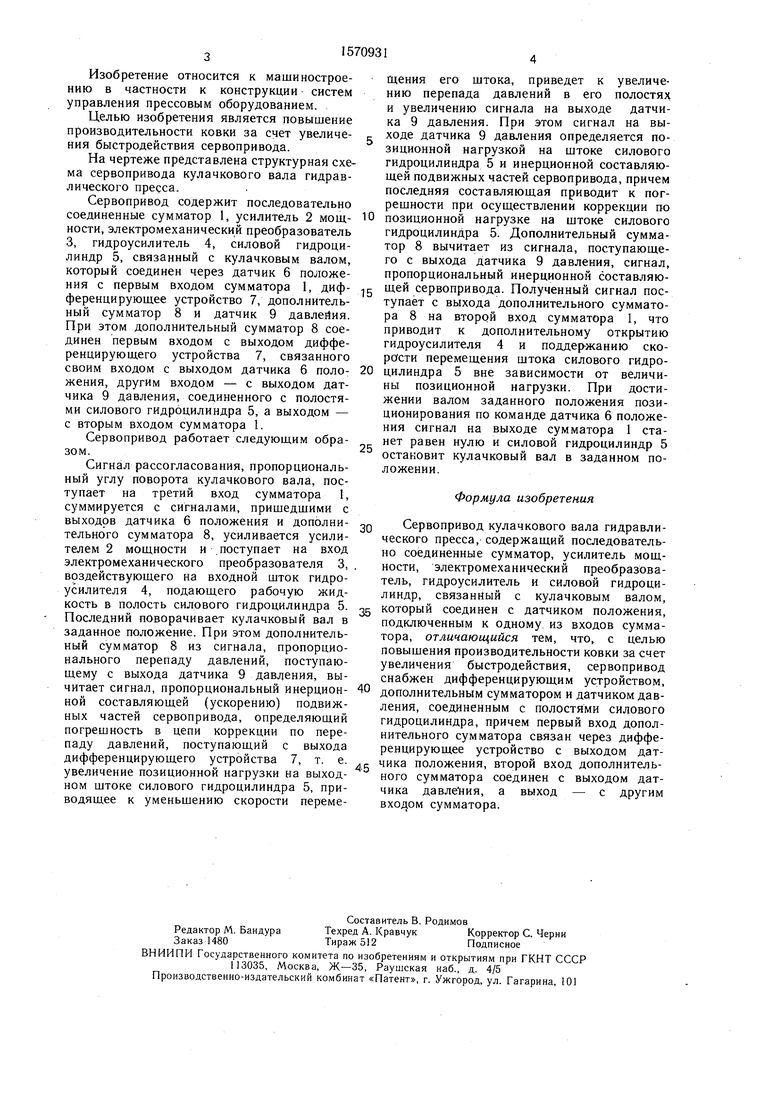
| название | год | авторы | номер документа |
|---|---|---|---|
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1989 |
|
SU1731652A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1988 |
|
SU1720894A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1989 |
|
SU1691137A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1988 |
|
SU1555144A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1988 |
|
SU1660994A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1989 |
|
SU1726279A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1987 |
|
SU1581602A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1990 |
|
SU1756174A1 |
| Сервопривод вала гидрораспределителя гидравлического пресса | 1987 |
|
SU1490002A1 |
| Система управления валом гидрораспределителя пресса | 1987 |
|
SU1530487A1 |
Изобретение относится к машиностроению, в частности к конструкциям систем управления прессовым оборудованием. Цель изобретения - повышение производительности ковки за счет повышения быстродействия сервопривода. Сервопривод содержит последовательно соединенные сумматор 1, усилитель мощности 2, электромеханический преобразователь 3, гидроусилитель 4, силовой гидроцилиндр 5, связанный с кулачковым валом. За счет введения дополнительного сумматора, в котором производится суммирование сигнала с датчика давления 9 в полости силового гидроцилиндра и сигнала, пропорционального инерционной составляющей подвижных частей сервопривода, производится изменение скорости перемещения штока силового гидроцилиндра вне зависимости от позиционной нагрузки. 1 ил.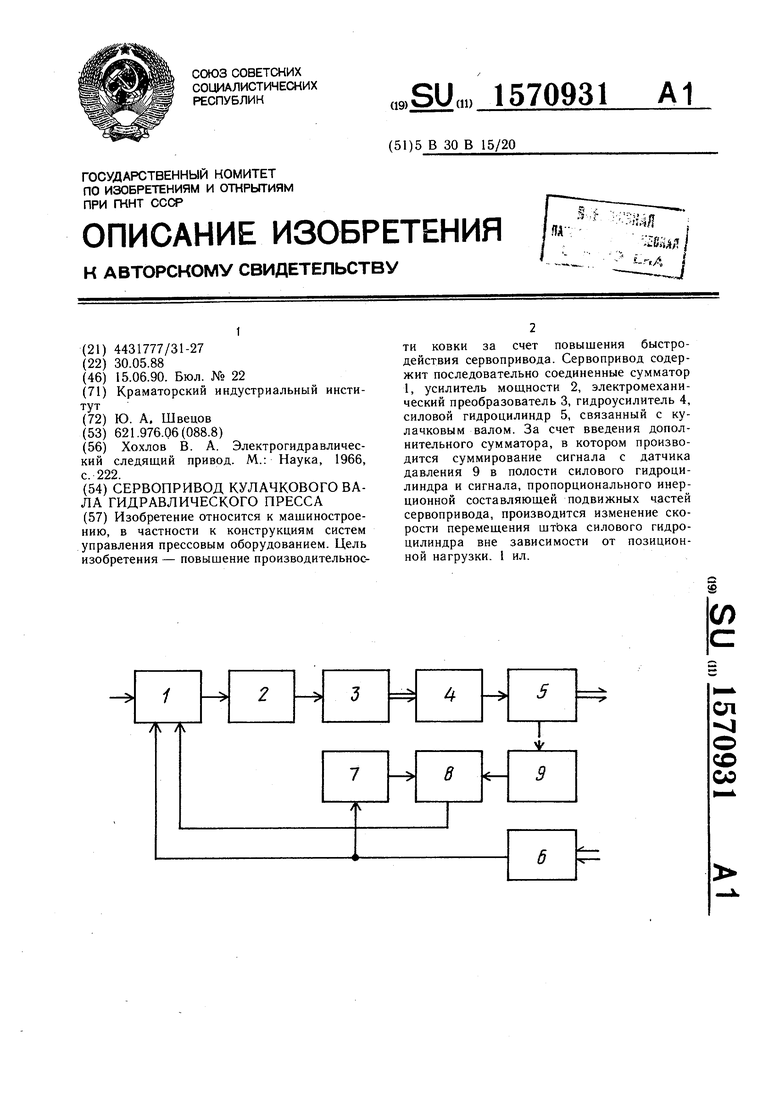
| Хохлов В | |||
| А | |||
| Электрогидравлический следящий привод | |||
| М.: Наука, 1966, с | |||
| Камневыбирательная машина | 1921 |
|
SU222A1 |
