Изобретение относится к машиностроению, в частности к устройствам управления гидравлическим оборудованием для обработки металлов давлением.
Цель изобретения - повышение производительности пресса путем повышения быстродействия позиционирования вала главного гидрораспределителя.
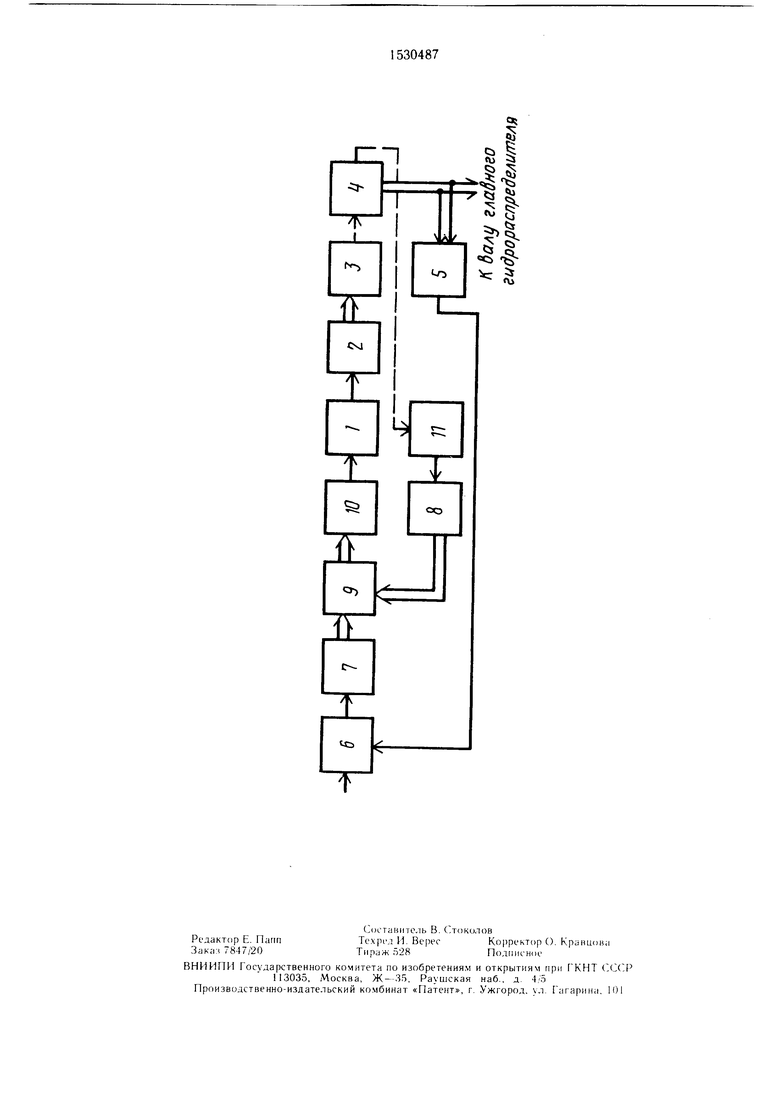
На чертеже представлена структурная схема системы управления валом главного гидрораспределителя пресса.
Система управления содержит соедииен- ные последовательно усилитель 1 мощности, электромеханический преобразователь 2, гидроусилитель 3, связанный с гидростаи- цией, и силовой гидроцилиндр 4, связанный с валом главного гидрораспределителя и через датчик 5 положения с сумматором 6, два формирователя 7 и 8 адреса, выполненные в виде аналого-цифровых преобразователей, устройство 9 памяти, цифроаналого- вый преобразователь 10 и датчик II давления. Устройство 9 памяти соединено через первый формирователь 7 адреса с выходом сумматора 6, через цифроаналоговый преобразователь 10 - с входом усилителя I мощности и через второй формирователь 8 адреса - с выходом датчика II давлеиия, связанного с полостями силового гидроцилиндра 4, причем формирователи 7 и 8 адреса и устройство 9 памяти соединены между собой шинами входов и выходов.
Система управления работает следующим образом.
Сигнал, пропорциональный заданному углу поворота вала главного гидрораспределителя, поступает на вход сумматора 6, где суммируется с сигналом, пришедшим с выхода датчика 5 положения, и поступает на вход первого формирователя 7 адреса, т. е.
сд
оо
о
4ib
ОО
3
на вход lepcoro формирователя 7 адреса приходит сигнал, пропорциональный остатку пути до заданного положения позиционирования. Первый формирователь 7 адреса подает на вход устройства 9 памяти двоичный код адреса, соответствующий при111ед1иему на его вход сигналу, пропорциональному остатку пути до заданного положения позиционирования вала главного гидрораспределителя. Второй формирователь 8 адреса подает на вход устройства 9 памя1и дв(;ич- ный код адреса, соответствуюгций перепаду давлений на поршне силового гидроцилиндра 4, т. е. соответствуюп1ий позиционной нагрузке, приведенной к штоку си;юво- го гидрО|;илиндра 4 б.чагодаря связи через датчик 11 давления с полостями силового гидроцилиндра 4.
Устройство 9 намят в зависи.мости от кода адреса, поступающего на его входы и соответствующего остатку пути до заданного положения позиционирования вала главно1Ч) гидрораспределителя и позиционной нагрузке, приведенной к штоку силового гидро- 4, подает на свой выход предварительно записанный на iiTaiie экснеримента.1ь- ных исс.ледований определенный двоичный код. Этот кодовый сигнал преобразуется в аналоговый сигнал цифроаналоговым преобразователем 10, усиливается усилите.лем I мощности и поступает на вход электромеханического преобразователя .2, который пропорционально этому сигналу переместит на определенную величину штсж гидрсп сили- теля 3, который подает рабочую жидкосгь в силовой |-идроцилиндр 4, шток которого начинает поворачивать вал главного гидро распределителя.
Таким образом, в зависимости от входного сигнала, соответствующего остатку пути до заданного по.южения позиционирования и позиционной на1рузке, приведенной к што1 cii/ioiuiiu I идроцп. 1ппд)а 4, па 1И, устройства 9 памяти подается предварите.чь- но записанный двоичный код. Это сигнал, соответствуюпии о |реде.енной скорости ремещения штока силового гидроцилиндра 4 для достижения вала главно|о i ид- рораспределителя силовым гидроцилиндром 4 из одного положения в другое с максп- ма.льной скоростью и при остатке до заданного положения позиционирования.
равного тормозному - торможения штока силового гидроцилиндра 4 с постоянным оптимальным с точки зрения устранения гидравлических и динамических ударов ус- корения. При достижении валом главного гидрораспределителя заданного положения позиционирования сигналы на входах сумматора 6 становятся равны между собой по величине и имеют противоположные знаки, а на выходе сумматора 6 устанавливается
нулевой уровень сигнала, электромеханический преобразователь закрывает гидроусилитель 3, который прекращает подачу рабочей жидкости в полость силового гидроцилиндра 4, и его шток останавливает вал глав- кого гидрораспределителя в заданном положении позиционирования с высокой точностью.
Эффективность использования системы управления обуславливается повышением точности позиционирования вала главного
гидрораспределителя пресса.
Формула изобретения
(истема управления валом гидрораспре,И , 1ите,1я пресса, содержащая соединенные последовательно усилитель мощности, элек- тро.механический преобразователь, гидроуси- лите.чь, связанный с гидростанцией, и силовой гидроцилиндр, соединенный с валом главного гидрораспределителя, а также сумматор, соединенный через датчик положения с этим валом, отличающаяся тем, что, с целью повышения производительности пресса пу- те.м повышения быстродействия позиционирования вала главного гидрораспределителя, она снабжена двумя формирователями
a. ipeca в виде аналого-цифровых преобразователей, устройством памяти, цифроаналого- Бым преобразователем и датчиком давления в силовом гидроцилиндре, причем выход датчика давления подключен к входу второго формирователя адреса, шина выходов ко- lopoi o соединена с входами устройства памяти, на другой вход которого подключена шина выходов первого формирователя адреса, вход Koroporj) соединен с выходом сумматора, фи этом шина выходов устройства
памяти подключена к входам цифроанало- roBofo преобразователя, выхоа которого соедипен с входом усилителя мощности.
Изобретение относится к машиностроению, в частности к устройствам управления гидравлическим оборудованием для обработки металлов давлением. Цель изобретения - повышение производительности пресса путем повышения быстродействия позиционирования вала главного гидрораспределителя. В систему управления введена обратная связь по перепаду давлений на поршне силового гидроцилиндра (пропорционально позиционной нагрузке, приведенной к штоку силового гидроцилиндра). Для этого используется датчик давления. Система снабжена двумя формирователями адреса, устройством памяти и цифроаналоговым преобразователем, входы которого соединены с шиной выходов устройства памяти. Шины входов последнего подключены соответственно к выходам первого и второго формирователей адреса. Устройство памяти содержит сигнал, код которого соответствует величине открытия электромеханического преобразователя, т.е. определенной скорости перемещения штока силового гидроцилиндра для достижения позиционирования вала главного гидрораспределителя с максимальной скоростью и получения требуемой точности его позиционирования. 1 ил.
| Хохлов В | |||
| А | |||
| Электрогидравлический следящий привод | |||
| - М.: Наука, 1966, с | |||
| Камневыбирательная машина | 1921 |
|
SU222A1 |
