(fmB.I
N
4 О s3
о сд
Изобретение относится к машиностроению и может найти применение, в частности, в составе гибких производственных систем, в транспортных роботах для загрузки-разгрузки и транспортирования деталей, находящихся в кассетах.
Цель изобретения - расширение функциональных возможностей и повышение надежности загрузки-разгрузки и транспортирования кассет.
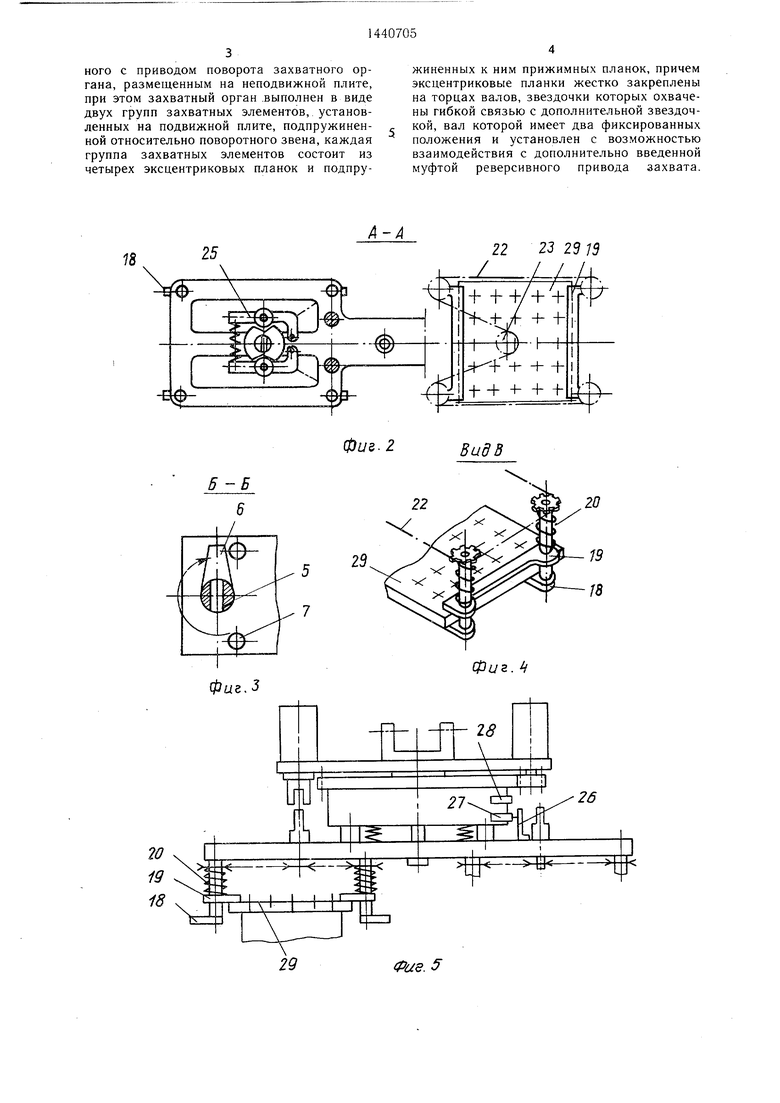
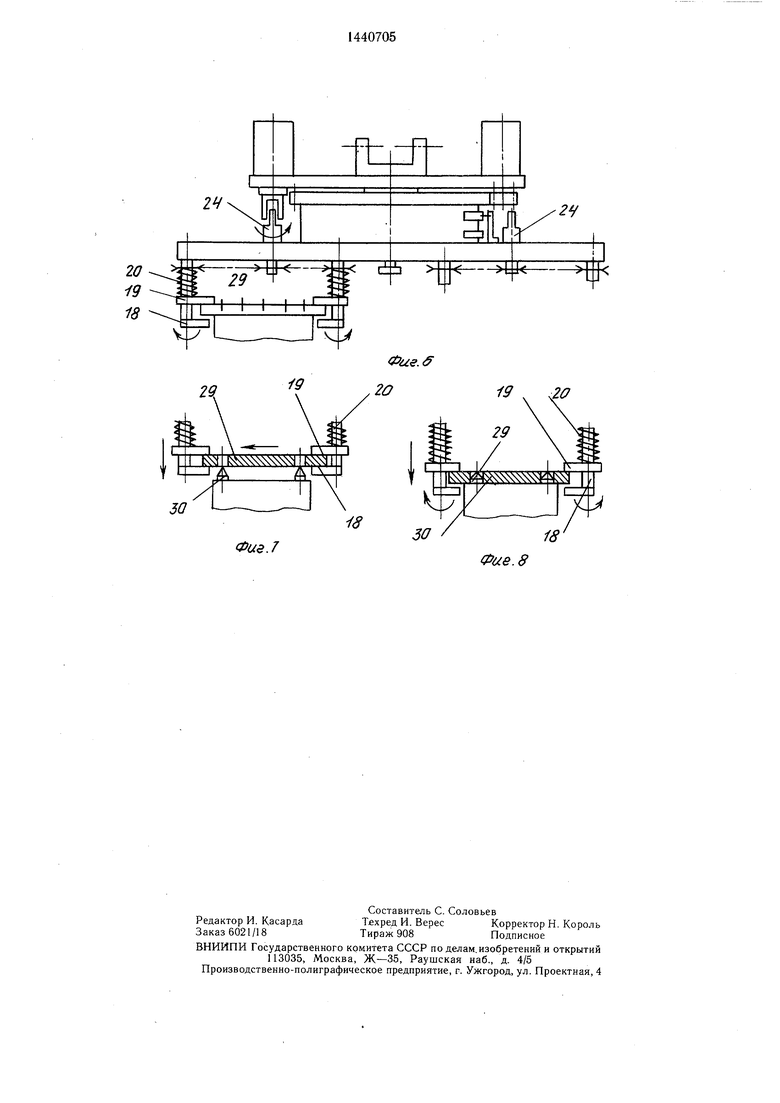
На фиг. 1 изображено захватное уст- ройство транспортного робота, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 1; на фиг. 5 и 6 - положения устройства при захвате кассеты; на фиг. 7 и 8 - положения устройства и кассеты при разгрузке.
Захватное устройство транспортного робота содержит плиту 1, закрепленную с помощью кронштейна 2 на вертикальной каретке робота (не показана), и размещенные на плите реверсивный привод 3 захвата и привод 4 поворота. На валу привода 3 установлены телескопическая муфта 5 и поводок 6, а также упоры 7. На валу привода 4 закреплена шестерня 8, сцепленная с шестерней 9, сидящей на поворотном звене 10, которое на подшипниках установлено на валу 11, жестко связанном с плитой 1. На последней также закреплены упоры поворота и датчики переключения скорости и останова (не показаны).
В поворотном звене 10 на направляющих 12 помещены колонки 13, запрессованные в плиту 14, подпружиненную в вертикальной плоскости пружинами 15 и удерживаемую винтом 16. На плите 14 размещен захватный орган, .выполненный в виде двух групп захватных элементов. Каждая группа захватных элементов состоит из четырех жестко закрепленных на торцах валов 17 эксцентриковых планок 18 и прижимных планок 19, подпружиненных к ним с помощью пружин 20. На каждом из валов 17 жестко смонтированы звездочки 21, соединенные в своей группе гибкой связью 22 между собой и с дополнительной звёздочкой 23, вал 24 которой с лысками на конце расположен соосно с валом привода 3.
Валы 24 с помощью фиксатора 25 имеют два фиксированных положения. На плите 14 закреплены флажок 26, датчики 27 переключения скорости опускания каретки робота на медленную и датчик 28 остановки каретки 28. На исходных позициях кассеты 29 фиксированы на базовых поверхностях, например, конических щтифтах 30.
Захватное устройство работает следующим образом.
Захват кассеты. После остановки транспортного робота над кассетой 29, каретка робота опускается, прижимные планки 19 упираются в поверхность кассеты 29, сжимая пружины 20, усилие которых выбрано
5
5
0
г 0
0
5
0
5
таким, что при сжатии их на величину более, чем толщина кассеты, плита 14 останавливается, срабатывает датчик 27, переключая скорость на медленную, пружины 15 сжит маются, вал 24 входит в муфту 5, и датчик 28 останавливает каретку. Привод 3 поворачивает муфту 5, вал 24 и далее через гибкую связь 22 - эксцентриковые планки 18. Каретка робота поднимается, кассета при этом оказывается зажатой между планками 19 и 18.
Транспортирование кассет. После захвата кассеты 29, например с заготовками, с за-, грузочной позиции склада и подъема захвата привод 4 поворачивает плиту 14, меняя захваты местами, при этом против муфты 5 останавливается вал 24 другой группы захватных элементов. Робот транспортирует кассету с заготовками на другую позицию, например, к станку, где захват берет указанным способом кассету с готовыми деталями, поднимается с двумя захваченными кассетами и после поворота загружает кассету с заготовками на позицию станка. При транспортировке кассет муфта 5 выходит из зацепления с валом 24, поэтому произволь- Hbie срабатывания привода 3 не приводят к выпадению кассеты. Кроме того, от случайного поворота захватные элементы предохраняют фиксаторы 25, что повышает надежность работы захвата.
Загрузка кассеты. Опускаясь вместе с захватами, кассета 29 своими базовыми отверстиями находит на конические штифты 30, центрируется по ним, при этом кассеты, преодолевая силы трения между поверхностями прижимных планок 19 и эксцентриковых планок 18, самоустанавливаются. После окончательной установки кассеты до опорной поверхности, пружины 20 сжимаются, эксцентриковые планки 18 отходят от нижней поверхности кассеты, плита 14 останавливается, срабатывает датчик 27, пружины 15 сжимаются, срабатывает датчик 28, отключается привод движения вниз. Вал 24 входит в зацепление с муфтой 5 привода 3, и он поворачивает эксцентриковые планки 18, окончательно освобождая кассету/. Каретка робота вместе с захватом поднимаются.
Формула изобретения
Захватное устройство транспортного робота, содержащее каретку, привод захвата, установленный на неподвижной относительно каретки плите, и захватный орган, установленный на плите, подвижной относительно каретки, отличающееся тем, что, с целью расщирения функциональных возможностей и повыщения надежности загрузки-разгрузки и транспортирования кассет, оно снабжено поворотным звеном, установленным на подшипниках вала, жестко закрепленного на неподвижной плите и кинематически связанного с приводом поворота захватного органа, размещенным на неподвижной плите, при этом захватный орган .выполнен в виде двух групп захватных элементов, установленных на подвижной плите, подпружиненной относительно поворотного звена, каждая группа захватных элементов состоит из четырех эксцентриковых планок и подпружиненных к ним прижимных планок, причем эксцентриковые планки жестко закреплены на торцах валов, звездочки которых охвачены гибкой связью с дополнительной звездочкой, вал которой имеет два фиксированных положения и установлен с возможностью взаимодействия с дополнительно введенной муфтой реверсивного привода захвата.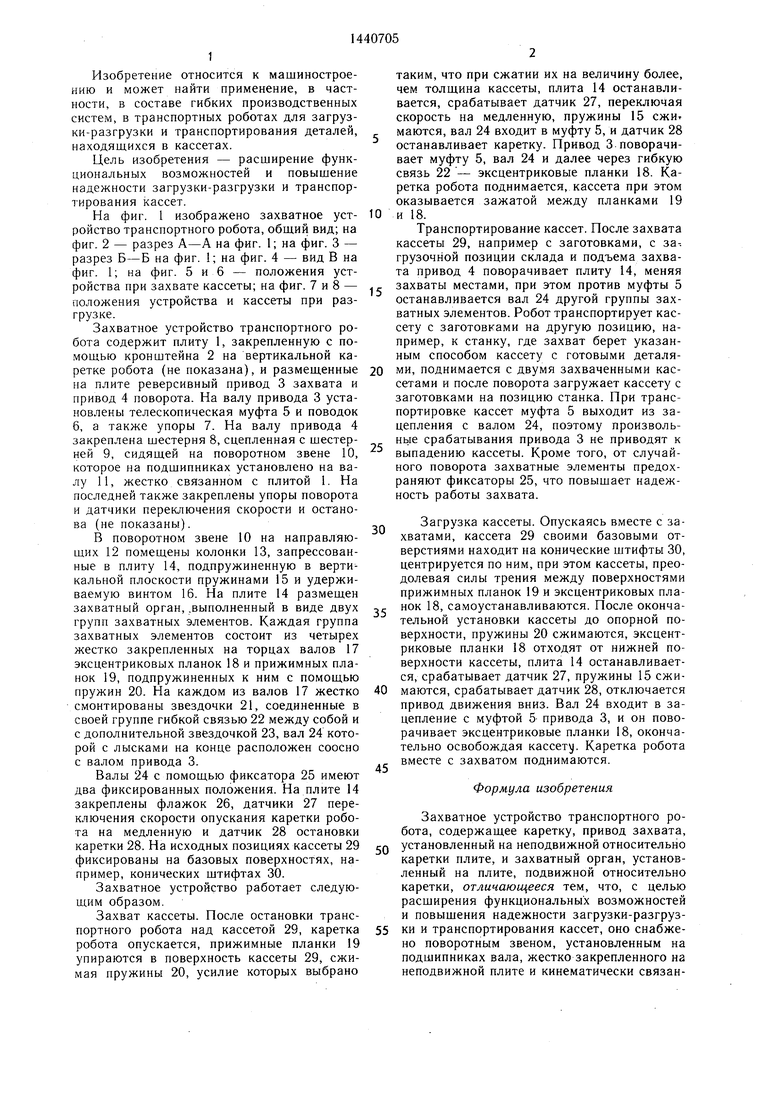
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная транспортно-накопительная система | 1987 |
|
SU1458163A2 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Автомат для сборки радиаторов | 1982 |
|
SU1042944A1 |
| Установка для изготовления деревянных щитов | 1979 |
|
SU887168A1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Устройство Кривовязюка для отделения нижнего листа от стопы | 1980 |
|
SU937088A1 |
| Устройство для подачи листовых заготовок в рабочую зону пресса | 1991 |
|
SU1777569A3 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
Изобретение относится к машиностроению и может быть использовано в транспортных роботах. Цель изобретения - расширение функциональных возможностей и повышение надежности загрузки-разгрузки и транспортирования кассет с изделиями. На неподвижной плите 1 каретки робота смонтированы привод захвата 3 и привод поворота 4. На валу привода 3 установлена муфта 5, а на валу привода 4 - шестерня 8, сцепленная с шестерней 9 и осуше- ствляюш ая поворот поворотного звена 10 вместе с подпружиненной относительно него плитой 14, на которой размеш.ены две группы захватных элементов. Для захватывания каретка опускается, прижимные планки 19 упираются в кассету 29, сжимая пружины 20. Усилие поджатия передается на плиту 14, пружины 15 сжимаются и вал 24 входит в контакт с муфтой 5 привода 3. Включившись, привод 3 поворачивает муфту 5, вал 24 и далее через гибкую связь 22 эксцентриковые планки 18. Каретка поднимается, кассета при этом оказывается зажатой между планками 19 и 18, вал 24 выходит из контакта с муфтой 5. С помощью привода 4 поворачивают плиту 14, меняя местами группы захватных элементов. 8 ил. (Л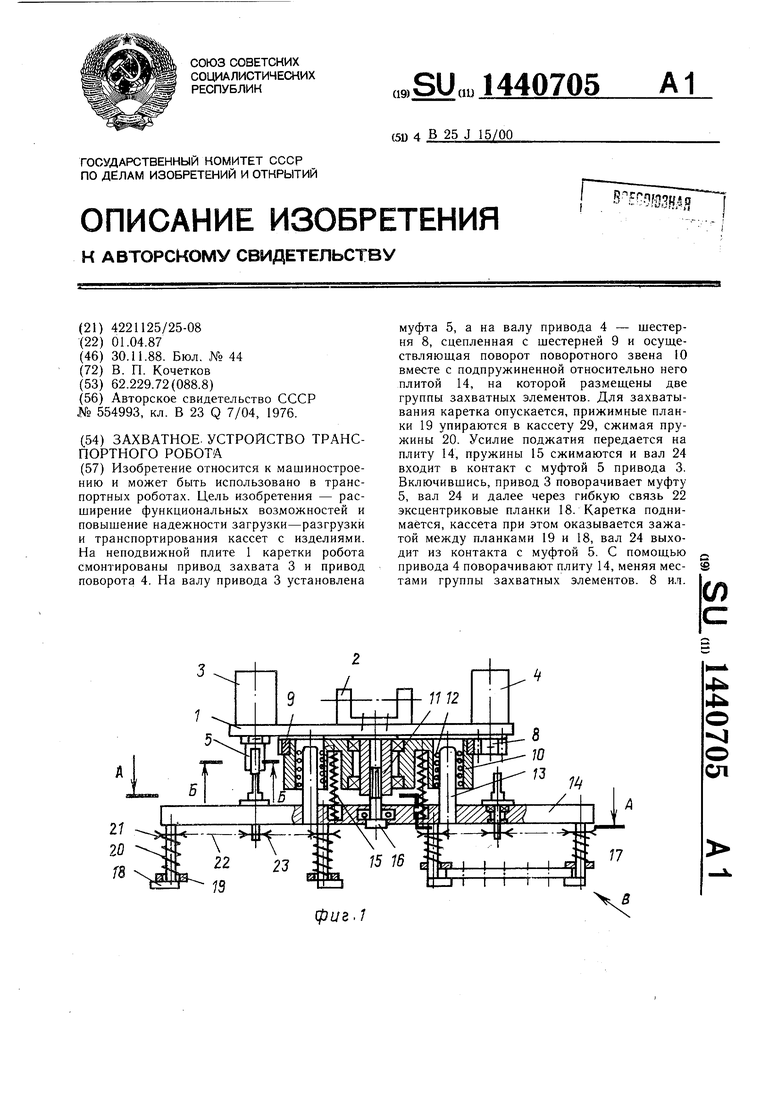
Фиг- 2
Б -Б
Фиг.З
f(-A
22 23 2S 75
В ид В
Фиг. if
Фае. 5
24
:il
29
H:K-:5:
Фи$.7
m
24
d5
1 tk30
.8
| Автооператор | 1976 |
|
SU554993A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
