4 О 00 СП 4
Изобретение о- -; )ситси к подъемно- транспортному маши: сг,1оен 1Ю.
Целью изобретения я; ,., повышение точности позиционирования груза.
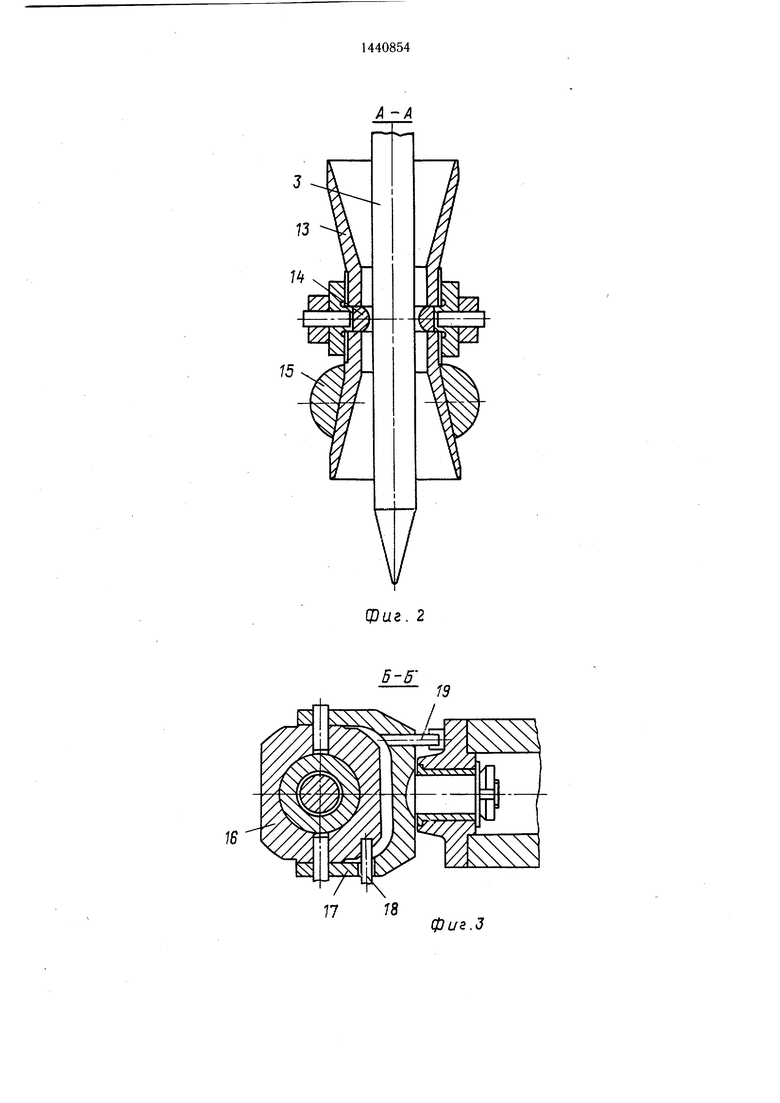
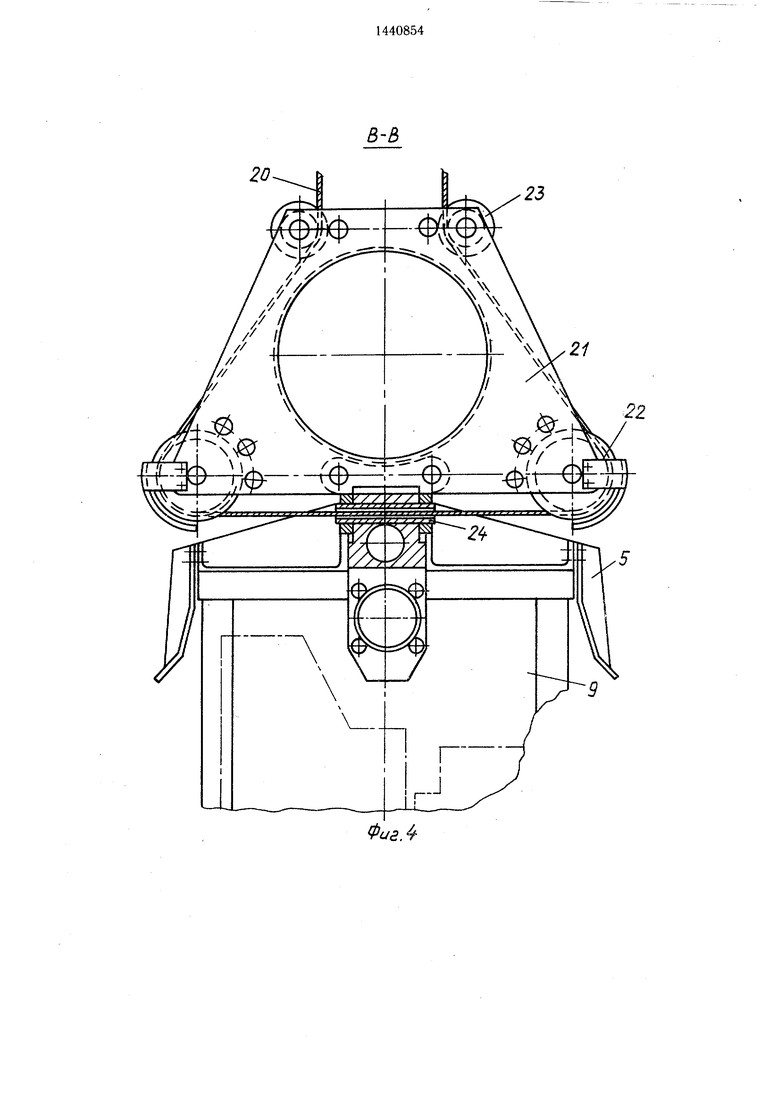
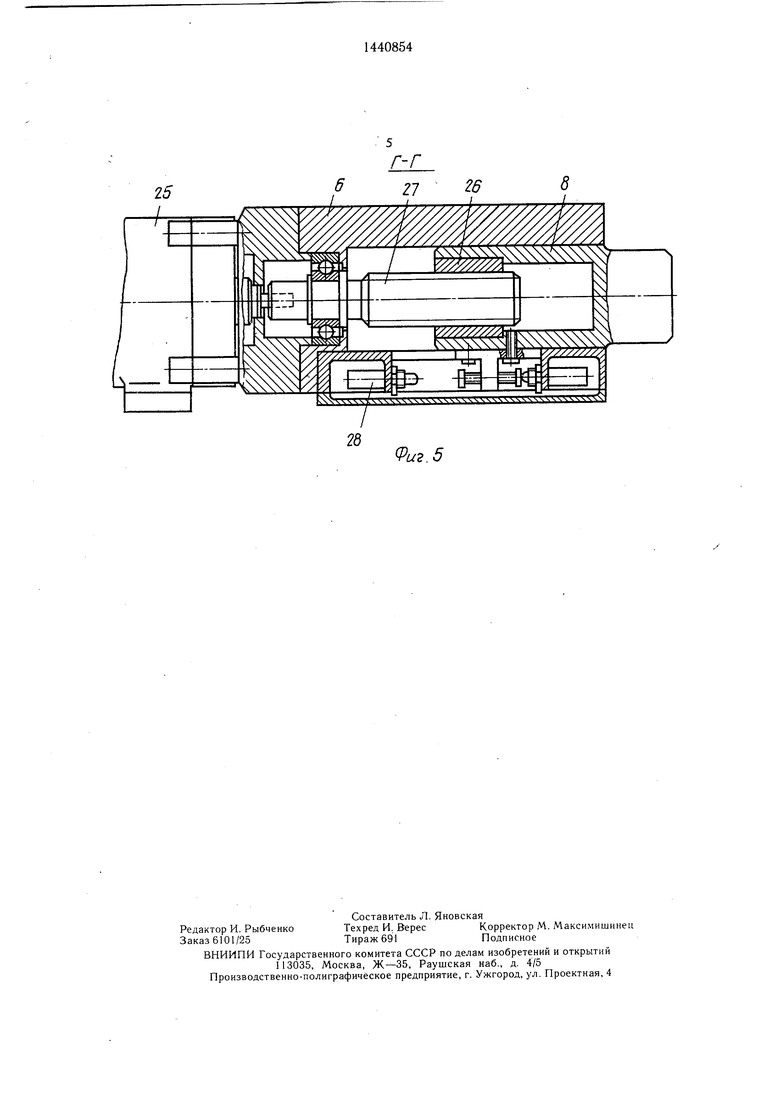
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1.
Устройство содержит электротягач 1, грузовую тележку 2, направляющие стержни 3, траверсу 4 с ограничительными упорами 5 и 6, ориентирующими втулками 7 и грузозахватными органами 8, удерживающими перемещаемый контейнер 9, стойки 10, несущие на себе направляющие стержни 11, не менее чем по две на каждой позиции 12 захвата-разгрузки. Ориентирующие втулки 7 имеют примыкающие друг к другу части 13, тороидальное кольцо 14, контргруз 15. Втулки 7 подвещены к траверсе 4 корпусом 16 на вилке 17 с возможностью качания в двух плоскостях до упоров 18 и 19. Траверса 4 подвешена на тросах 20 тросовых подвесок грузовой тележки 2 посредством кронщтей- нов 21 в виде трапеции с вмонтированными в ее углах блоками 22 и 23. Кронщтейны 21 соединены с траверсой 4 втулками 24 с возможностью качания. Грузозахватные органы 8, взаимодействующие с перемещаемым контейнером 9, установлены в ограничительных упорах 6 и кинематически соединены с электроприводом 25, гайкой 26 и ходовым БИНТОМ 27, крайние положения которых контролируются концевыми выключателями 28.
Электротягач 1 и грузовая тележка 2 установлены на монорельсе 29 на катках 30, 31.
Устройство работает следующим образом.
Для захвата или отстыковки контейнеров 9 траверса 4, подвешенная на тросах 20 посредством кронщтейнов 21 с вмонтированными в них блоками 22 и 23, через втулку 24 выходит из зацепления втулками 7 с направляющими стержнями 3, опускается над позицией 12 захвата-разгрузки и входит в зацепление втулками 7 с направляющими стержнями 11, установленными на стойках 10, а также ограничительными упорами 5 и 6 с перемещаемым контейнером 9 (при захвате контейнера).
После полной посадки траверсы 4 на контейнер 9 включаются автономные электроприводы 25, приводящие в движение грузозахватные органы 8 через ходовой винт 27 и вмонтированную в органы 8 гайку 26. Грузозахватные органы выходят из ограничительных упоров 6 и прижимают контейнер 9 к нижней поверхности траверсы 4. Концевые выключатели 28 грузозахватных органов 8 дают команду на привод грузовой
тележки 2 на по.дъем траверсы 4. Втулки 7 траверсы с захваченным контейнером 9 выходят из зацепления с направляющими стержнями 11, установленными на стойках 10 позиции 12, захвата-разгрузки, и траверса 4 с контейнером 9 поднимается на тросах 20. В верхнем положении втулки 7 траверсы 4 входят в зацепление с направляющими стерх нями 3, установленными на грузовой тележке 2, на которой, в свою очередь, установлены концевые выключатели привода
намотки и размотки тросов 20.
Элёктротягач 1 и грузовая тележка 2, установленные на катках 30 и 31, перемещаются по монорельсу 29 на следующую позицию захвата-разгрузки. Далее осуществляется цикл разгрузки.
Формула изобретения
1.Устройство для подъема и перемещения груза между заданными позициями,
содержащее подвижную от привода вдоль монорельса грузовую тележку с направляющими стержнями и тросовыми подвесками, несущими траверсу с грузозахватными органами и ориентирующими втулками с примыкающими друг к другу цилиндрическими
и коническими участками, отличающееся тем, что, с целью повыщения точности позиционирования груза, оно снабжено на заданных позициях стойками с направляющими стержнями, а ориентирующие втулки выполнены из двух частей с противоположно
направленными их конусными участками, снабжены тороидальным кольцом, установленным между цилиндрическими участками указанных частей и контргрузом на наружной поверхности конического участка одной из частей втулки, причем ориентирующие втулки закреплены на траверсе с возможностью качания их в двух взаимно перпендикулярных вертикальных плоскостях.
2.Устройство по п. 1, отличающееся тем, что тросовые подвески прикреплены к траверее посредством размещенных между стойками параллельно последним кронштейнов трапециевидной формы с большим основанием, направленным в сторону траверсы, и несущих по углам блоки.
3.Устройство по п. 1, отличающееся тем, что грузозахватные органы снабжены автономными приводами.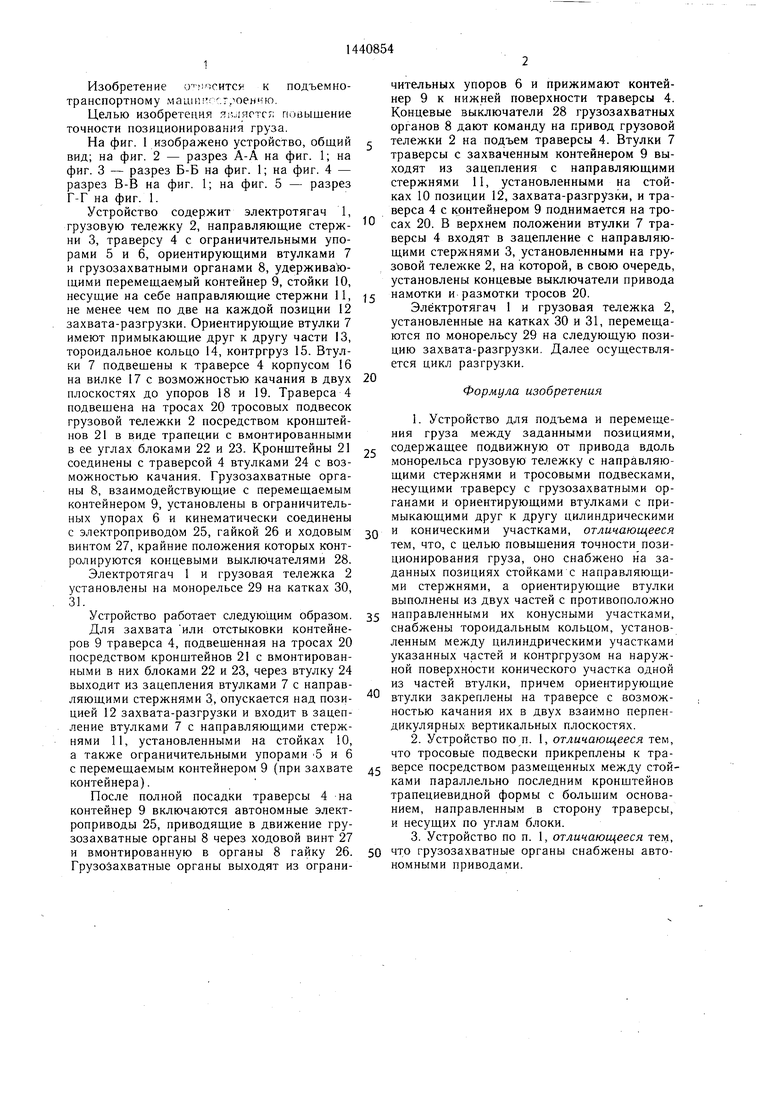
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема и транспортирования грузов | 1990 |
|
SU1759781A1 |
| Устройство для подъема и перемещения груза | 1984 |
|
SU1235820A1 |
| Кран для подъема и подачи грузов в оконный проем здания | 1988 |
|
SU1673500A1 |
| Строительный подъемник | 1978 |
|
SU740677A1 |
| Кран для подъема и подачи грузов в оконный проем здания | 1990 |
|
SU1808809A1 |
| УСТРОЙСТВО для ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ | 1968 |
|
SU220456A1 |
| Устройство для загрузки и разгрузки стеллажей | 1983 |
|
SU1134484A1 |
| Устройство для перемещения вагонных тележек | 1989 |
|
SU1794735A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Устройство для подъема и подачи грузов в проемы здания | 1991 |
|
SU1821442A1 |
Изобретение относится к подъемно- транспортному машиностроению. Цель изобретения - повышение точности позиционирования груза. Устройство для подъема и перемещения груза между заданными позициями содержит грузовую тележку 2, подвижную вдоль монорельса 29 и несущую направляющие стержни 3. К грузовой тележке на тросах 20 подвешена траверса 4 с грузозахватными органами 8 и ориентирующими втулками 7, взаимодействующими с направляющими стержнями 11 стоек 10, установленных на позициях 12. Ориентирующие втулки 8 выполнены из двух частей, между которыми установлено тороидальное кольцо, а на одной из частей - контргруз. 2 з. п. ф-лы, 5 ил.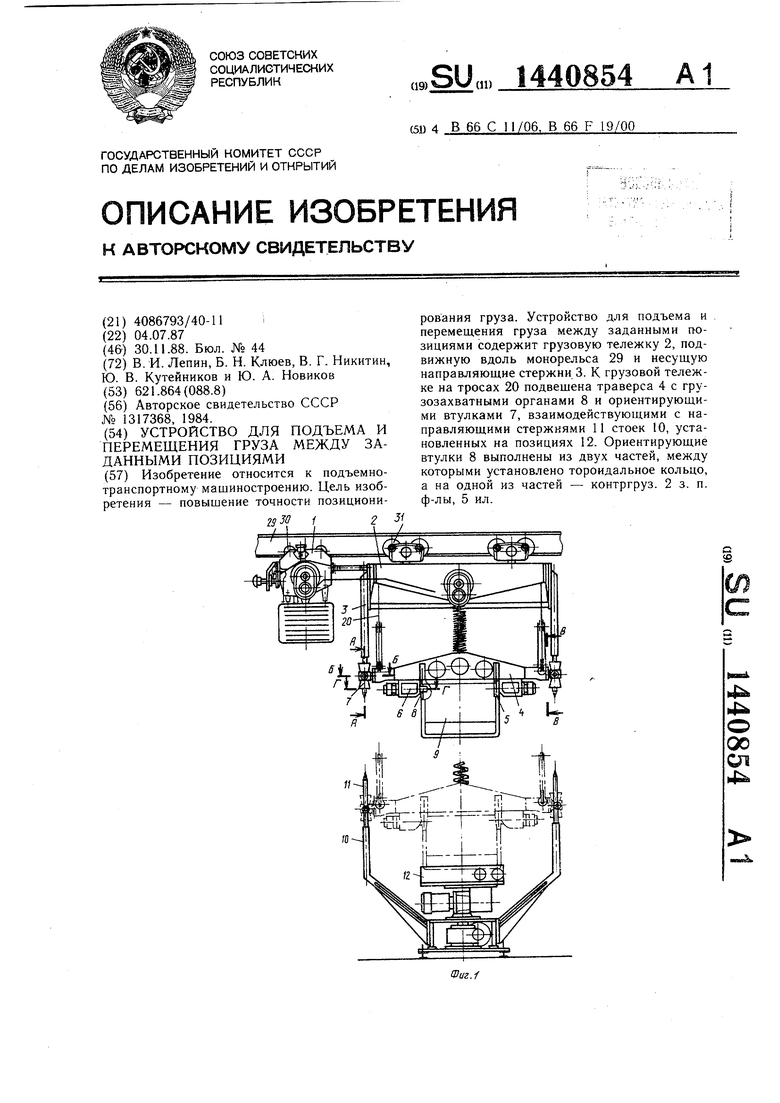
6-5
/5
фиг. 2
6-5
фиг.З
23
Фиг.
(Pu2.5
| Панорамный измеритель комплексных коэффициентов отражения | 1985 |
|
SU1317368A1 |
