31
Изобретение относится к машиностроению и может быть использовано, например, в робототехнике.
Цель изобретения - повышение надежности за счет упрощения системы управления.
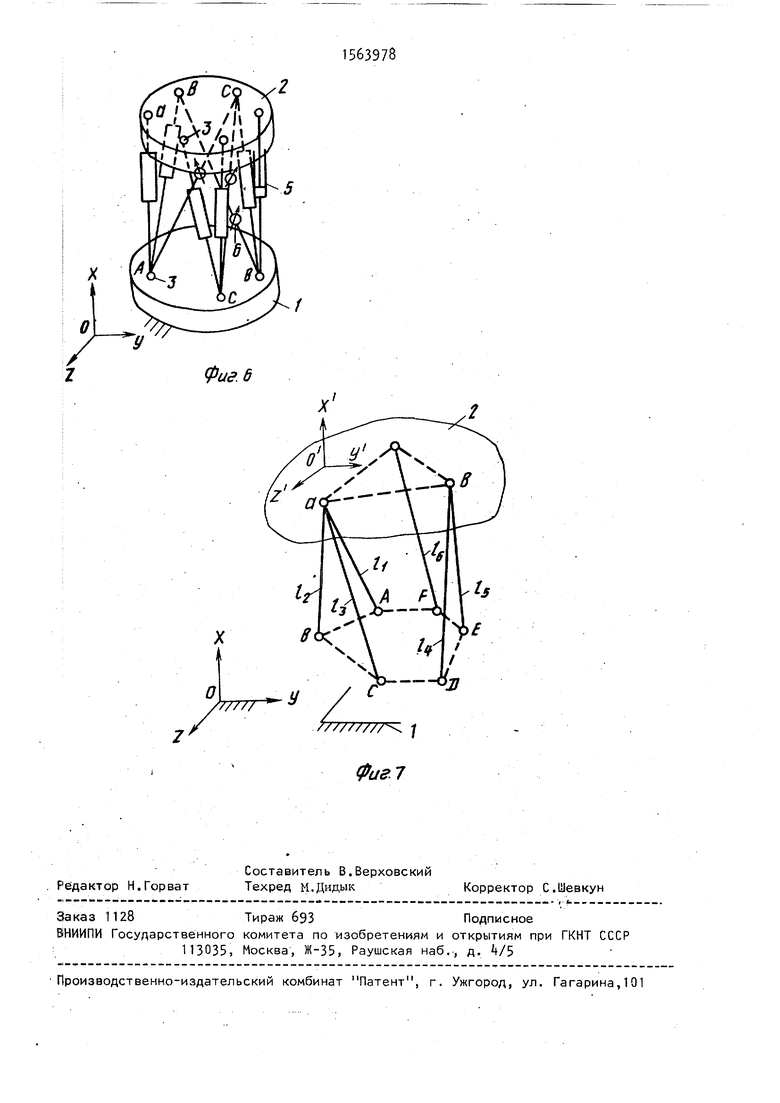
На фиг.1 представлена схема L-коо динатного пространственного механизм с шестью сферическими шарнирами на основании; на фиг.2 - то же, с пятью сферическими шарнирами; на фиг.З то же, с четырьмя сферическими шарнирами; на фиг.А - то же, с креплением двух измерителей расстояний в шарнир С; на фиг.5 - схема L-координатного пространственного механизма с тремя сферическими шарнирами на основании; на фиг.6 - то же, с установкой в каждом из сферических шарниров основани по одному измерителю расстояний; на фиг.7 - расчетная схема для определения положения подвижного звена.
L-координатный пространственный механизм содержит основание 1, под- вижное звено 2, которые соединяются с помощью сферических шарниров 3 шестью приводами А линейного перемещения с регуляторами длины 5 а такж измерителями 6 расстояния между шарн рами :3 основания 1 и шарнирами 3 подвижного звена 2.
Механизмы, представленные на фиг., отличаются количеством точе основания 1, в которых размещаются шарниры 3. Количество точек на основании 1 в этих механизмах изменяется от 3 до 6. Эти механизмы реализуют свою отличную от других структуру L-координат.
При управлении движением L-коор- динатных пространственных механизмов необходимо решать прямую и обратную задачу о положениях.
L-координатный механизм работает следующим образом.
Для перемещения подвижного звена 2 в новое положение в систему управления приводами (не показана) вводит
0
Q
5 0
5
0
45
ся информация о расстояниях между сферическими шарнирами основания и подвижного .звена, получаемая от трех измерителей 6 расстояний. Системой управления приводами производится вычисление координат трех шарниров подвижного звена и выработка управляющих воздействий на приводы. Приводы k линейного перемещения отрабатывают управляющие воздействия, что приводит к перемещению подвижного звена в требуемое положение.
Как показано на фиг.1-6, продольные оси приводов 4 линейного перемещения и продольные оси измерителей 6 расстояний расположены так, что через центры, трех сферических шарниров подвижного звена проходит соответственно одна, две и три указанных оси. Это позволяет определять координаты сферических шарниров в явном виде, что существенно сокращает время вычислений.
формула изобретения
1.L-координатный механизм, содержащий основание, подвижное звено, шесть приводов линейного перемещения, каждый из которых соединен с основанием и с подвижным звеном сферическими шарнирами, а также систему управления приводами, отличающийся тем, что, с целью повышения надежности за счет упрощения системы управления приводами, он снабжен тремя измерителями расстояний, каждый из которых также соединен с основанием и с подвижным звеном дополнительно введенными сферическими шарнира ми, при этом измерители расстояний подключены к системе управления приводами.
2.Механизм поп.1,отличаю- щ и и с я тем, что продольные оси приводов линейного перемещения и продольные оси измерителей расстояний расположены так, что через центры трех сферических шарниров подвижного звена проходят сбответственно одна, две и три указанных оси.
.0
Фиг Л
ФигЗ
| название | год | авторы | номер документа |
|---|---|---|---|
| L-координатный пространственный механизм | 1988 |
|
SU1583726A1 |
| @ -Координатный пространственный механизм (его варианты) | 1984 |
|
SU1222538A1 |
| @ -Координатный пространственный механизм | 1985 |
|
SU1441123A1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758374C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2028927C1 |
| @ -Координатный пространственный механизм | 1985 |
|
SU1303398A1 |
| Способ и устройство для испытания стрелкового оружия и/или стендовых испытаний ракетных двигателей | 2023 |
|
RU2799168C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИНАМИЧЕСКОЙ СИСТЕМОЙ | 1992 |
|
RU2073904C1 |
| Автоматизированный сортировщик-подборщик манипулятора-трипода | 2019 |
|
RU2722960C1 |

Изобретение относится к машиностроению и может быть использовано в робототехнике. Цель изобретения - повышение надежности за счет упрощения системы управления. L - координатный механизм содержит основание 1, подвижное звено 2, шесть приводов 4 линейного перемещения, каждый из которых соединен соответственно с основанием и с подвижным звеном с помощью сферических шарниров 3. Для перемещения подвижного звена 2 в систему управления приводами вводится информация о расстояниях между сферическими шарнирами 3 основания и сферическими шарнирами 3 подвижного звена, получаемая от трех измерителей 6 расстояний, соединенных сферическими шарнирами с основанием и с подвижным звеном. Системой управления приводами производится вычисление координат трех шарниров подвижного звена и выработки управляющих воздействий на приводы. Приводы 4 линейного перемещения отрабатывают управляющие воздействия, что приводит к перемещению подвижного звена в требуемое положение. Продольные оси приводов 4 и измерителей 6 расположены так, что через центры сферических шарниров 3 подвижного звена проходят соответственно одна, две и три таких оси. Это позволяет определять координаты сферических шарниров в явном виде и упростить системы управления приводами. 1 з.п. ф-лы, 7 ил.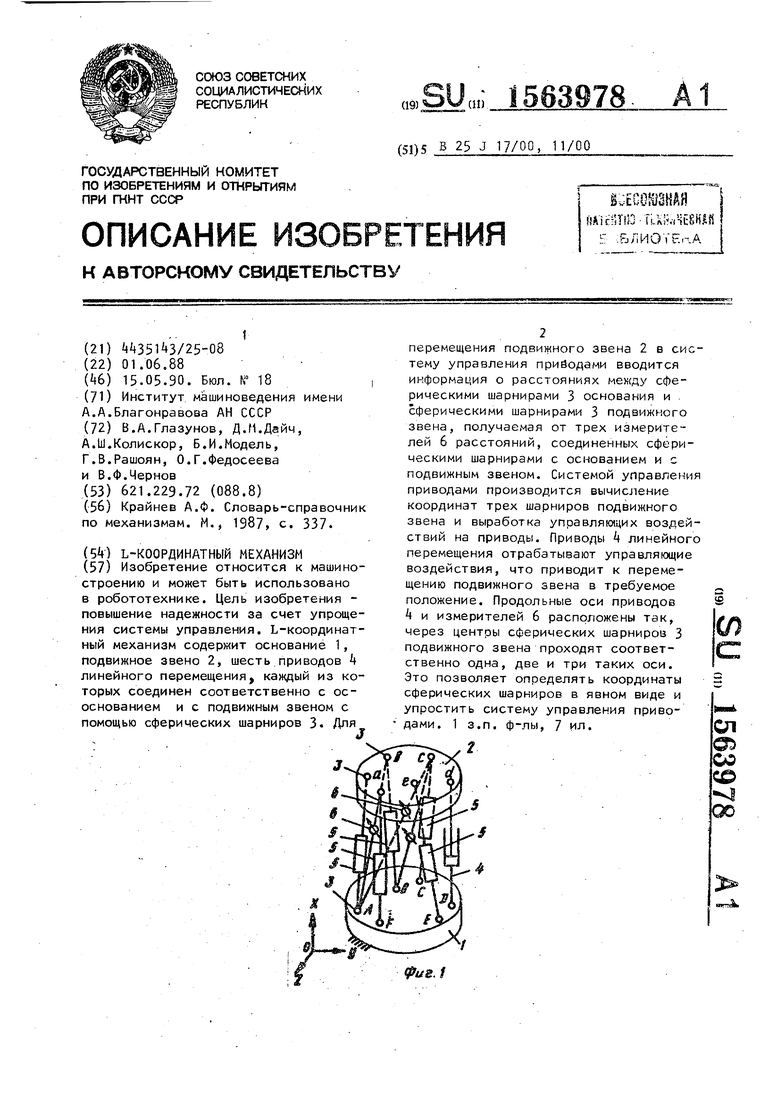
Фиг. 5
Фиа.б
//////// 1
Фиг.7
| Крайнев А.Ф | |||
| Словарь-справочник по механизмам | |||
| М., 1987, с | |||
| Ленточный тормозной башмак | 1922 |
|
SU337A1 |
