(21)4254349/31-08
(22)23.03.87
(46) 07.12.88. Бюл. № 45
(71)Тульский политехнический институт
(72)В.В.Поляков, И.С.Бляхеров, В.В.Прейс, В.Н. Лебедев, Ю.Н.Липченко и С.Р.Михайлов
(53)62-229.6(088.8)
(56)Авторское свидетельство СССР № 878489,кл. В 23 Q 7/02, 1979.
(54)РОТОРНЬЙ АВТОМАТ ПИТАНИЯ
(57)Изобретение относится к области станкостроения, а именно к устройствам автозагрузки технологических ро- торньк машин штучными заготовками. Целью изобретения является расширение технологических возможностей роторного автомата питания и повьппение его производительности. Внутренняя поверхность каждой воронки 5 вьшолнена
в виде сопрягаемых между собой усеченных конусов 6, 7, 8, 9 с соответ- :. ствеино уменьшающимися углами при вершине. Оси усеченных конусов 7, В, 9 установлены наклонно к оси воро1жи 5, кроме оси усеченного конуса 6, прилегающего к выходному окну 10. Точки пересечения осей О,. AjB,B,r соответственно усеченных конусов 6, 1, 8, 9с плоскостью, перпендикулярной оси воронки, расположенной вьшге усеченного конуса 9, лежат на спиральной линии. Роторный автомат питания работает f следующим образом . Детали 2 загружают в бункер 1. При вращении вала ротора и воронок 5 за счет ворошения высту- а пающим концом воронки 5 детали 2 попадают с конического дна 3 йа поверхность усеченного конуса 9 воронки 5. Вращаясь, воронка 5 захватьтвает и за счет сил трения раскрут1ивает ее вдоль
сл
с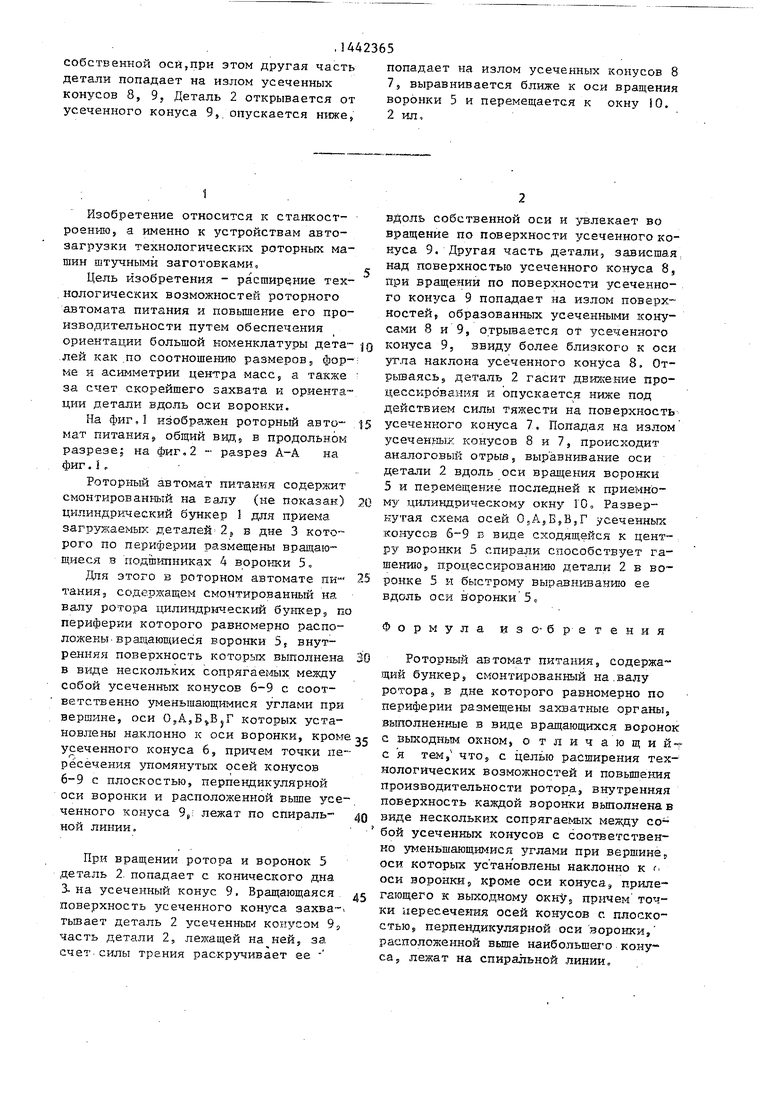
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1981 |
|
SU1013194A2 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Роторный автомат питания | 1987 |
|
SU1754409A1 |
| Загрузочный ротор | 1989 |
|
SU1602677A1 |
| Роторный автомат питания | 1987 |
|
SU1430228A1 |
| Роторный автомат питания | 1979 |
|
SU878489A2 |
| Роторный автомат питания | 1987 |
|
SU1468710A1 |
| Загрузочное устройство | 1980 |
|
SU931367A1 |
| Роторный автомат питания | 1988 |
|
SU1537455A1 |
| Роторный автомат питания | 1977 |
|
SU666039A1 |


ю
00 О) CFI
,1442365
собственной ОСИ,при этом другая часть попадает на излом усеченных конусов 8 детали попадает на излом усеченных 1 выравнивается ближе к оси вращения конусов 8, 9j Деталь 2 открывается от воронки 5 и перемещается к окну 10. усеченного конуса 9,. опускается ниже, 2 ил.
Изобретение относится к станкост- оению, а именно к устройствам автозагрузки технологических роторных маин штут1нымй заготовками,„
Цель изобретения - расширение тех- нологических возможностей роторного автомата питания и повышение его производительности путем обеспечения ориентации большой номенклатуры дета- JQ ей как ,по соотношению размеров, фор-: Мб и асимметрии центра MacCj а также за счет скорейшего захвата и ориентации детали вдоль оси воронки.
На фиг,1 изображен роторный авто- ,15 мат питанияJ общий вид в продольном разрезе; на фиг,2 - разрез А-А на фиг.i „
Роторный автомат питания содержит смонтированный на валу (не показан) 20 цилиндрический бункер I для приема загружаемых деталей 2. в дне 3 которого по периферии размещены вращающиеся в подшипниках 4 ворокки 5 о
Для этого в роторном автомате пи 25 танияэ содержащем смонтированный на валу ротора цилиндрический буз-шерэ по периферии которого равномерно расположены вращающиеся воронки 5j внутренняя поверхность которых выполнена 30 в виде нескольких сопрягаег ых между собой усеченных конусов 6-9 с соот- ветственно уменьшающимися углами при вершине, оси OjAjB BjT которых установлены наклонно к оси воронки, кроме с усеченного конуса 6, причем точки пересечения упомянутых осей конусов 6-9 с плоскостью, перпендикулярной оси воронки и расположенной вьщ1е усеченного конуса лежат по спираль- 40 ной линии.
При вращении ротора и воронок 5 деталь 2. попадает с конического дна 3. на усеченный конус 9, Вращающаяся, поверхность усеченного конуса захва 1 тывает деталь 2 усеченньш конусом 9, часть детали 2, лежащей на ней, за счет, силы трения раскручивает ее
доль собственной оси и увлекает во ращение по поверхности усеченного конуса 9. Другая часть детали, зависшая, ад поверхностью усеченного конуса 8, ри вращении по поверхности усеченноо конуса 9 попадает на излом поверхностей, образованных усеченными конусами 8 и 9, отрьшается от усеченного конуса 9, ввиду более близкого к оси угла наклона усеченного конуса 8. 0т- рьюаясь, деталь 2 гасит двихгение про- цесскрования и опускается ниже под ействием силы тяжести на поверхность усеченного конуса 7. Попадая на излом усечен 1ьщ конусов 8 и 7, происходит аналоговый отрьш, выравнивание оси детали 2 вдоль оси вращения воронки 5 и перемещение последней к приемно- тл-у цилиндрическому окну ГО о Развернутая схема осей OsAjBsBjF усеченных KOfiyccB 6-9 Г5 виде сходящейся к центру воронки 5 спирали способствует га- шешпо, п.роцессированию детали 2 в во ронке 5 и быстрому выравниванию ее вдоль оси в оронки 5
Формула изо-бретения
РоторньП 1 автомат питания, содержа™ щий бункер, смонтированный на.валу ротора, в дне которого равномерно по периферии размещены захватные органы, выполненные в ви,це вращающихся воронок с выходным окном, о тличающий-f с я тем, что, с целью расширения технологических возмож.ностей и повьшения производительности ротора, внутренняя поверхность каждой воронки вьшолнена в виде нескольких сопрягаемых меж,ду со бой усеченных конусов с соответственно уменьшающимися углами при вершине,, оси которых установлены наклонно к f. оси воронки, кроме оси , прилегающего к выходному ОКНУ; причем точки иересечения осей конусов с плоскостью, перпендикулярной оси зоронки, расположенной вьше наибольшег о конуса, лежат на спиральной линии.
Редактор А.Ворович
Составитель И.Щивьев Техред Л.Сердюкова
Заказ 6343/14
Тираж 922
ВНИИПИ -Государственного комитета СССР
по делам- изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фаз. 2
Корректор В.Бутяга
Подписное
