1
Изобретение относится к станкостроению, а именно к устройствам автоматической загрузки технологических машин штучными деталями, и может быть использовано для многоручьевой подачи в ориентированном положении плоских деталей типа дисков с неявно выраженной фаской или выпуклостью
на одной из поверхностей в роторные и роторно-конвейерные машины и линии.
Целью изобретения является расширение функциональных возможностей роторного автомата питания за счет обеспечения возможности ориентации плоских деталей типа дисков с неявно
1.,
U68710
вр фаженной фаской или выпуклостью на одной из поверхностей.
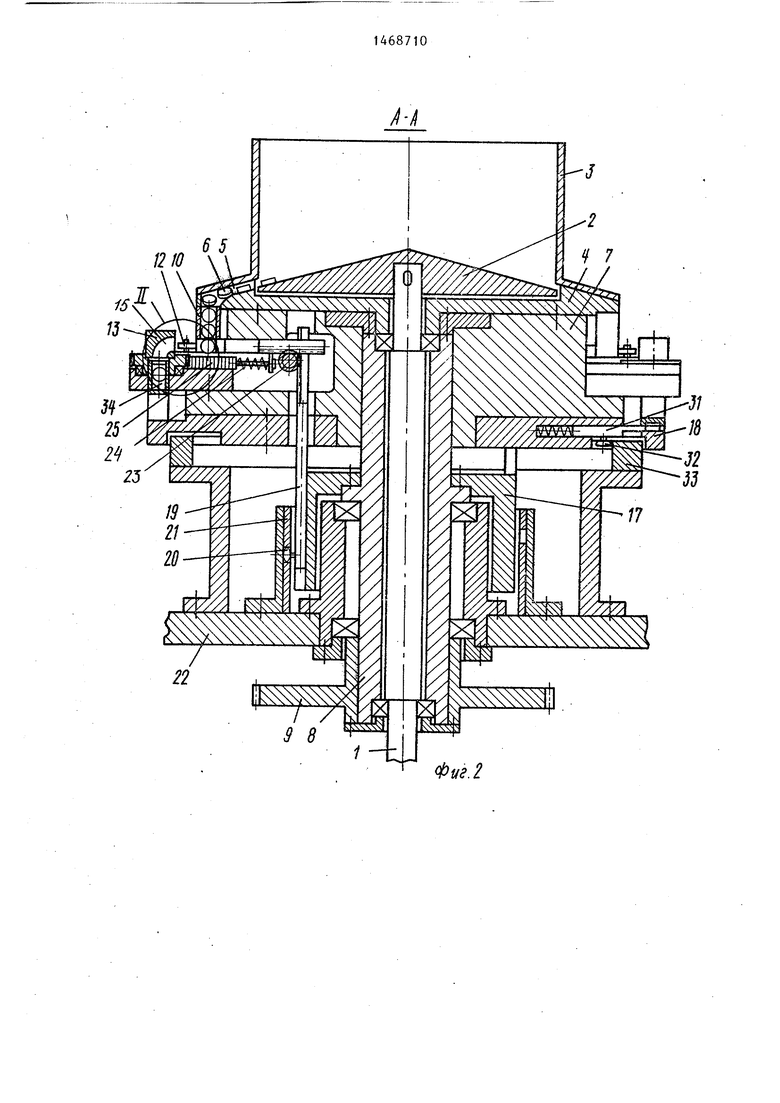
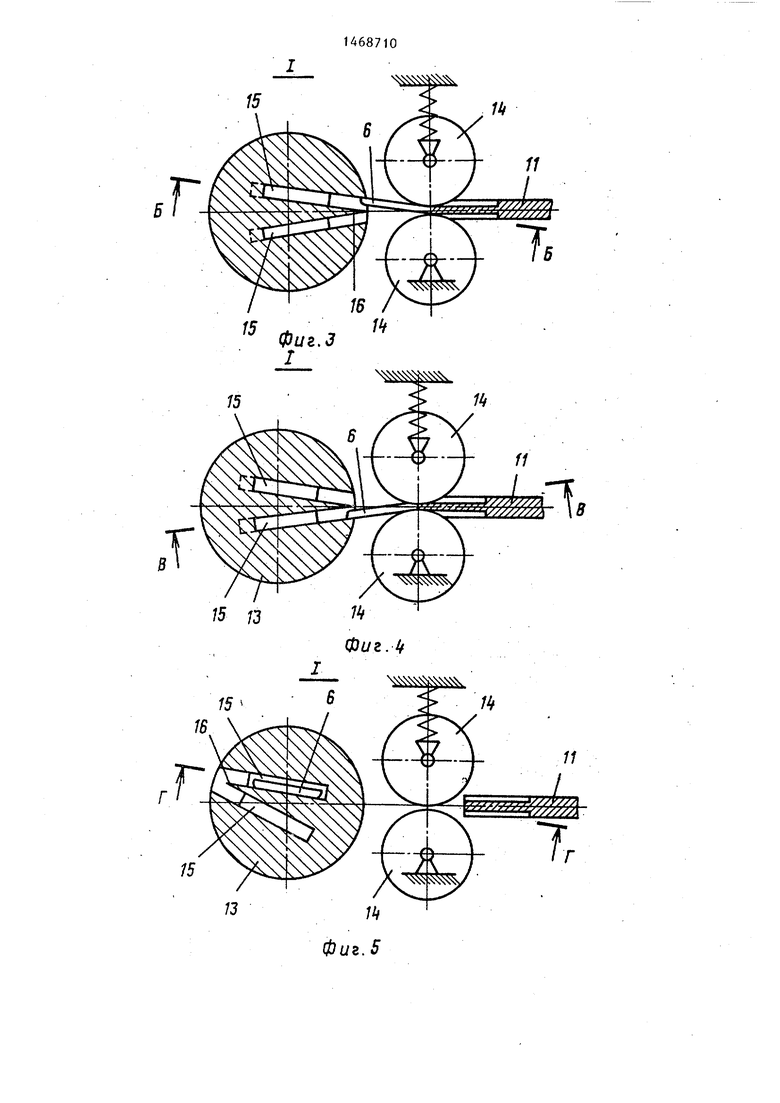
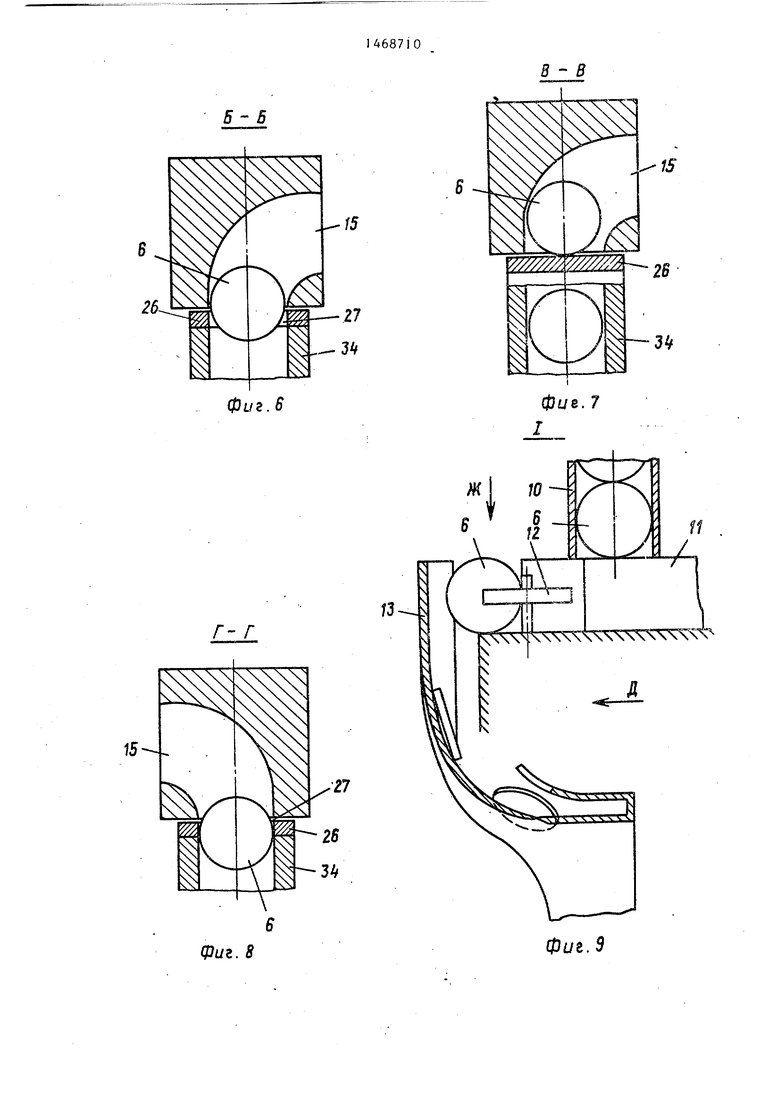
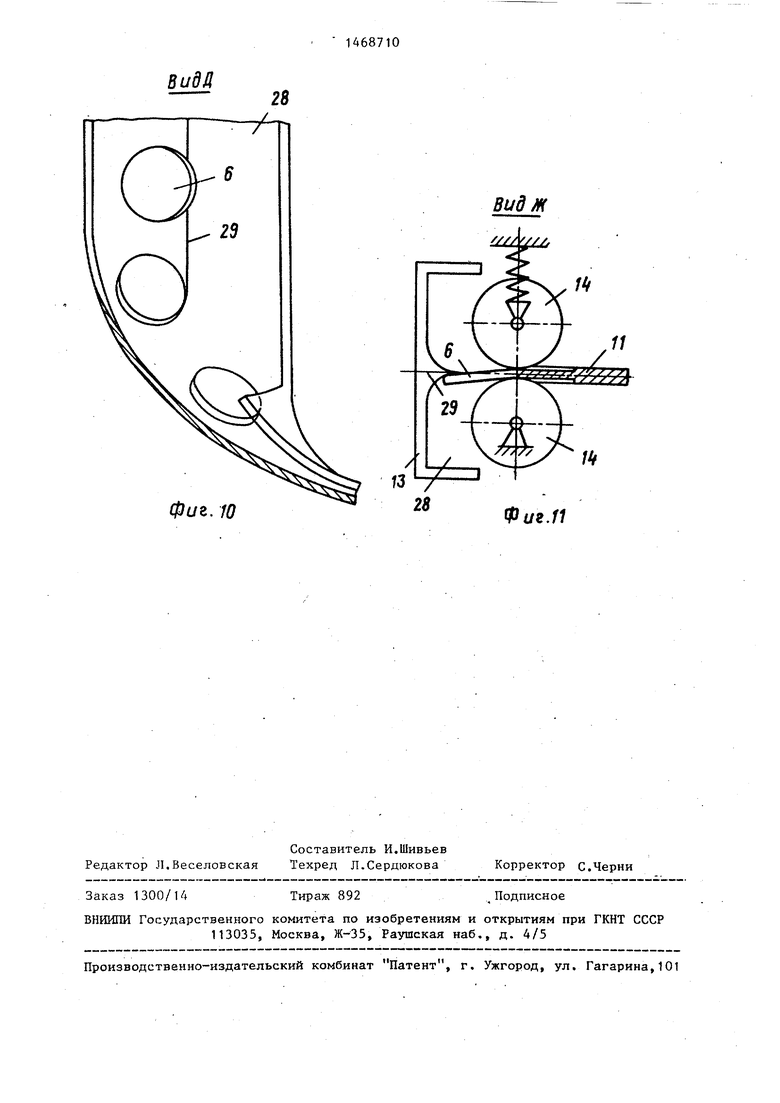
На фиг. 1 изображен роторный автомат питания, вид сверху; на фиг, 2- разрез на фиг, 1 на фиг, 3 - узел I на фиг. 1 (в момент подачи детали фаской влево); на фиг, 4 - то же, в момент подачи детали фаской вправо; на фиг. 5 - то же, в момент Q кантования детали; на фиг, 6 - разрез Б-Б на фиг. 3; на фиг. 7 -разрез В-Внафиг, 4, на фиг. 8 - разрез Г-Г на фиг. 5; на фиг. 9 - узел II на фиг, 2, вариант исполне- ния кантопаник-, на фиг. 10 - видт, Д на фиг, 9,- на фиг, 11 - вид Ж на фиг. 9,
Роторный автомат питания содер- 20 лсит лсестко закрепленный на валу 1 диск 2 и смонтированный соосно над ним бункер 3, к нижней части которого прикреплено кольцо 4 с равномерно расположенными по окружности ка- 25 налами 5 для захвата деталей 6. Кольцо 4 неподвижно закреплено на барабане 7,. установленном на полом валу В, приводимом во вращение от закрепленной на нем приводной шестерни 9. Q Каналы 5 связаны вертикальными лотками 10 с механизмами 11 поштучной, подачи, на пути которых установлены .механизмы 12 распознавания положения детали, за которыми установлены кантователи 13..35
Механизм 12 распознавания положения детали выполнен в виде двух роликов 14, подпружиненных друг к другу и установленных с возможностью
и диск 18. В барабане 17 расположе равномерно по окружности ползуны 1 выполненные в виде реек, которые взаимодействуют своими роликами 20 неподвижным цилиндрическим пазовым кулачком 21, закрепленным на основ нии 22 автомата, и приводятся в во вратно-поступательное движение и кинематически связаны через шестер ни 23 с соответствующим механизмом 11 поштучной подачи. Механизм 11 поштучной подачи через пружину 24 перемещает рейку 25, которая повор чивает вокруг вертикальной оси бар бан до упора (не показан), Под каж дым кантователем 13 смонтирована планка 26 с профильным окном 27 п одним из его пазов 15.
Кантователь 13 может быть выпол йен в виде лотка 28, разделенного клином 29 на две части. Острие кл на 29 обращено к механизму доштуч выдачи,
Детали но лотку 28 подаются к зиции выдачи, гдей крайняя деталь удерживается подпрулсиненной губко 30 и подпружиненным толкателем 31 взаимодействующ -1М при вращении ди ка 18 своим роликом 32 с неподвиж ным копиром 33,
Под ка;вдым кантователем 13 смо тировама планка 26 с профильным о ном 27 под одним из пазов 15 кант вателя 13, Под каждой планкой 26 смонтирован лоток 34.
Роторный автомат питания работ следующим образом-.
Приводной механизм (не показан приводит во вращение вал 1 и закр
свободного вращен я в плоскости, пер- ленный на нем фрикционный диск 2,
пендикулярной плоскости детали 6, подаваемой exaнизмoм 11 поштучной подачи.
Кантователь 13 выполнен в виде возвратно-поворотного барабана с двумя пазами 15, располонсенными сим- |метрично относительно вертикальной плоскости, проходящей через ось механизма 11 поштучной подачи, под острым углом друг к другу. Перегород- 50 ка мел-еду пазами 15 выполнена в виде рассекателя 16, острие которого обращено навстречу детали, подаваемой механизмом 11 поштучной подачи. Образующие пазов 15 выполнены в виде 55 радиусных кривых, крайние точки которых расположены соответственно на торце и образующей барабана. На валу 8 смонтированы также барабан 17
Детали 6 загружаются навалом в бу кер Зо От привода роторно-конвейе ной машины (не показан) через шес терню 9 приводится во вращение по вал 8, а вместе с HiiM барабаны 17 и 7, диск 18, кольцо 4 в бункер 3 Под действием центробежной силы д ли 6 перемещаются к периферии дис 2 и попадают в каналы 5 кольца 4, которые переводят их из горинонта пого положения в вертикальное. За тем детали 6 по вертикальным лотк 10 поступают к механизмам 11 пошт ной подачи. Ползун J9 через шесте ню 23 перемещает механизм 11 пошт ной подачи. Последний через пружи 24 перемещает рейку 25, которая п рачивает вокруг вертикальной оси рабан до упора (не показан), т.е.
и диск 18. В барабане 17 расположены равномерно по окружности ползуны 19, выполненные в виде реек, которые взаимодействуют своими роликами 20 с неподвижным цилиндрическим пазовым кулачком 21, закрепленным на основании 22 автомата, и приводятся в возвратно-поступательное движение и кинематически связаны через шестерни 23 с соответствующим механизмом 11 поштучной подачи. Механизм 11 поштучной подачи через пружину 24 перемещает рейку 25, которая поворачивает вокруг вертикальной оси барабан до упора (не показан), Под каждым кантователем 13 смонтирована планка 26 с профильным окном 27 под одним из его пазов 15.
Кантователь 13 может быть выпол йен в виде лотка 28, разделенного клином 29 на две части. Острие клина 29 обращено к механизму доштучной выдачи,
Детали но лотку 28 подаются к позиции выдачи, гдей крайняя деталь удерживается подпрулсиненной губкой 30 и подпружиненным толкателем 31, взаимодействующ -1М при вращении диска 18 своим роликом 32 с неподвижным копиром 33,
Под ка;вдым кантователем 13 смон- тировама планка 26 с профильным окном 27 под одним из пазов 15 кантователя 13, Под каждой планкой 26 смонтирован лоток 34.
Роторный автомат питания работае следующим образом-.
Приводной механизм (не показан) приводит во вращение вал 1 и закрепленный на нем фрикционный диск 2,
Детали 6 загружаются навалом в бун- кер Зо От привода роторно-конвейер- ной машины (не показан) через шестерню 9 приводится во вращение полый вал 8, а вместе с HiiM барабаны 17 и 7, диск 18, кольцо 4 в бункер 3. Под действием центробежной силы детали 6 перемещаются к периферии диска 2 и попадают в каналы 5 кольца 4, которые переводят их из горинонталь- пого положения в вертикальное. Затем детали 6 по вертикальным лоткам 10 поступают к механизмам 11 поштучной подачи. Ползун J9 через шестер- . ню 23 перемещает механизм 11 поштучной подачи. Последний через пружину 24 перемещает рейку 25, которая поворачивает вокруг вертикальной оси барабан до упора (не показан), т.е. ба514687
рабан занимает исходное положение для приема детали. При дальнейшем рабочем ходе механизм 11 поштучной подачи сжимает пружину 24 и проталкивает нижнюю деталь 6 из лотка 10 между роликами 14, отсекая столб детали, находящихся в ло.тке 10. В момент взаимодействия заднего края детали 6 с роликами 14 передний ее край откло-io няется от оси механизма 11 поштучной подачи в сторону, противоположную фаске (выпуклости), заходя за острие рассекателя 16, и при дальнейшем рабочем ходе механизм 11 поштучной по- 15 дачи заталкивает деталь в соответствующий сквозной паз 15 барабана.
Если деталь 6 находится в положении, при котором фаска (выпуклость) расположена на левой ее стороне, то 20 передний ее край отклоняется вправо от оси механизма 11 поштучной подачи 1 1 и деталь заталкивается в правый паз 15 барабана, под которым в неподвижной планке 26 имеется отве.р- 25 стие прямоугольного сечения, через которое деталь попадает в лоток 34. Если же деталь 6 находится в положении, при котором фаска (выпуклость) расположена на правой ее сто- зо роне, то передний ее край отклоняется влево от оси механизма 11 поштучной подачи и деталь заталкивается в левый паз 15 барабана, в котором она остается, находясь на планке 26, так как под левым пазом в планке 26 нет отверстия, соединяющего его с лотком 34. При холостом ходе (ходе назад) механизма 11 поштучной подачи пружина 24 разжимается, а механизм 11 поштучной подачи за головку стерж- ня отводит назад рейку 25, которая поворачивает барабан до совмещения левого паза 15, в котором находится деталь 6, с отверстием планки 26 (фиг. 5). Таким образом производится переориентация детали, и она в поожении, при котором фаска (выпукость) расположена на левой ее стороне, попадает в лоток .34 через отерстие в планке 26.50
В лотке 34 однозначно ориентиро- анные детали канапливаются, провигаясь по лотку, переводятся из ертикального положения в горизональное, при котором фаска (выпук- 55 ость) расположена на нижней поверх-, ости детали, и поступают на позиию выдачи, где крайняя деталь 6 держивается подпружиненной губкой
35
ю п ж и щ па ти ро
106
30. с позиции выдачи крайняя деталь 6 подается на рабочую позицию ротор- но-конвейерной машины (линии) подпружиненным толкателем 31, взаимодействующим при вращении диска 18 своим роликом 32 с неподвижным кольцевым копиром 33, закрепленным на основании 22 автомата. При выполнении кантователя в виде лотка 28 в момент взаимодействия заднего края детали 6 роликами 14 передний ее край отклоняется от оси механизма 11 поштучной подачи в сторону, противоположную фаске (выпуклости), заходя за острие клина 29, и при дальнейшем ходе механизм 11 поштучной подачи заталкивает деталь в сЬответствующую часть лотка 28, где она принимает вертикальное положение и соскальзывает вниз по спиральной поверхности лотка. Далее детали из двух частей лотка объединяются в один поток однозначно ориентированных деталей, накапливаются в лотке 34, продвигая-сь по нему, принимают горизонтальное положение, при котором фаска (выпуклость) расположена на нижней поверхности детали, и поступают на позицию выдачи.
20 25 зо 0
5
5
Формула изобретения
1, Роторный автомат питания, содержащий вал, смонтированный на основании с возможностью вращения, бункер, закрепленный на валу с .равномерно расположенными по его периферии каналами с механизмами поштучной подачи, фрикционный диск конической формы, установленный концентрично бункеру с возможностью вращения относительно вала ротора, отличающийся тем, что, с целью расширения функциональных возможностей роторного автомата питания, он снабжен механизмами распознавания,, каждый из которых размещен у соответствующего механизма поштучной выдачи, и кантователями, каждый из которых расположен за соответствующим механизмом распознавания,
2, Автомат по п, 1, отличающийся тем, что механизм распознавания положения детали выполнен в виде двух роликов, подпружиненных относительно друг друга и установленных с возможностью вращения, причем оси вращения роликов параллельны, лежат в одной плоскости и параллельны оси вращения вала ротора.
3,- Автомат по п. 1, о т л и - чающийся тем, что кантователь выполнен в виде барабана, установленного с возможностью качания вокруг оси, параллельной оси вала ротора с дополнительно выполненными в нем сквозными пазами, оппозит- но расположенными относительно горизонтальной плоскости, проходящей через ось качания барабана и под острым углом относительно друг друга.
направленным к механизму поштучной подачи.
4. Автомат по п. 1, отличающий с я тем, что кантователь выполнен в виде лотка, расположенного параллельно осям вращения роликов механизма распознавания и разделенного на две части клиновой поверхностью, острие которой обращено к механизму поштучной подачи. ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочный ротор | 1989 |
|
SU1602677A1 |
| Загрузочный ротор | 1989 |
|
SU1712125A1 |
| Роторный автомат питания | 1985 |
|
SU1283030A1 |
| Загрузочный ротор | 1988 |
|
SU1593904A1 |
| Роторный автомат | 1982 |
|
SU1042950A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ КОЛЕЦ С КОНИЧЕСКИМ ОТВЕРСТИЕМ | 1992 |
|
RU2008165C1 |
| Загрузочный ротор | 1990 |
|
SU1780988A1 |
| Автомат для контроля линейных параметров дисков фрикционов | 1975 |
|
SU766670A1 |
| Роторный автомат питания | 1976 |
|
SU564139A1 |
| Загрузочный ротор | 1991 |
|
SU1816642A1 |

изобретение относится к станкостроению, а именно к устройствам автоматической загрузки технологических машин штучными деталями, и может быть использовано для подачи деталей типа дисков в роторно-конвейерные машины. Целью изобретения является расширение функциональных возможностей роторного автомата питания за счет обеспечения ориентации плоских деталей типа дисков с неясно вьфа- женной фаской на одной из ее поверхностей. При вращении роторного автомата деталь 6 по каналам подается к механизму 11 поштучной подачи и последним проталкивается между двумя подпружиненными относительно друг друга вращающимися роликами 14. В момент взаимодействия заднего края детали 6 с роликами 14 передний край детали отклоняется от оси механизма поштучной подачи в сторону, противоположную фаске, выходя за острие рассекателя 16. При дальнейшем ходе механизма поштучной подачи деталь 6 заталк-ивается в соответствующий сквозной паз 15 кантователя 13, а затем проходит в отверстие в планке и в лоток или после поворота кантователя 13 до совмещения паза 15 непосредственно с окном деталь попадает, однозначно ориентируемая, в лоток, лоток. В дальнейшем детали 6 накапливаются в лотке и поступают на позицию выдачи. При выполнении кантователя в виде лотка, разделенного клиновой поверхнос тью на две части, в момент взаимодействия заднего края детали 6 с роликами 14 передний ее край отклоняется от оси механизма поштучной подачи 11 в сторону, заходя за острие клина, и заталкивает деталь 6 в соответствующую часть лотка, где она принимает вертикальное положение и соскальзывает по спиральной поверхности лотка. Далее детали из двух потоков объединяются в один поток и подаются к позиции выдачи. 3 3 о п. ф-лы, 11 ил. с (Л О5 00
Фш.1
22
j; /5
.C:
JJ
Фиг.2
Фиг.З
/5
15
/
Б- В
фиг. В
Г- Г
15
фиг. 8
3
Фив. 7
.3.
V V . . X
N
5
Фиг.В
ВидД
фиг. 10
Редактор Л.Веселовская
Составитель И.Шивьев Техред Л.Сердюкова
Заказ 1300/16
Тираж 892
ВНИШТИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
вид /f(
Iff
11
Iff
Фиг,11
Корректор с.Черни
Подписное
| УСТРОЙСТВО для ЗАГРУЗКИ и ОРИЕНТИРОВАНИЯДЕТАЛЕЙ | 0 |
|
SU334038A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
