4ib 4 N3
ОО СО
ю
11
Изобретение относится к робототехнике и может быть использовано при создании манипуляторов, работающих по заданной программе.
Целью изобретения является упрощение устройства за счет исключения объема памяти, необходимого для осуществления возвратных операций.
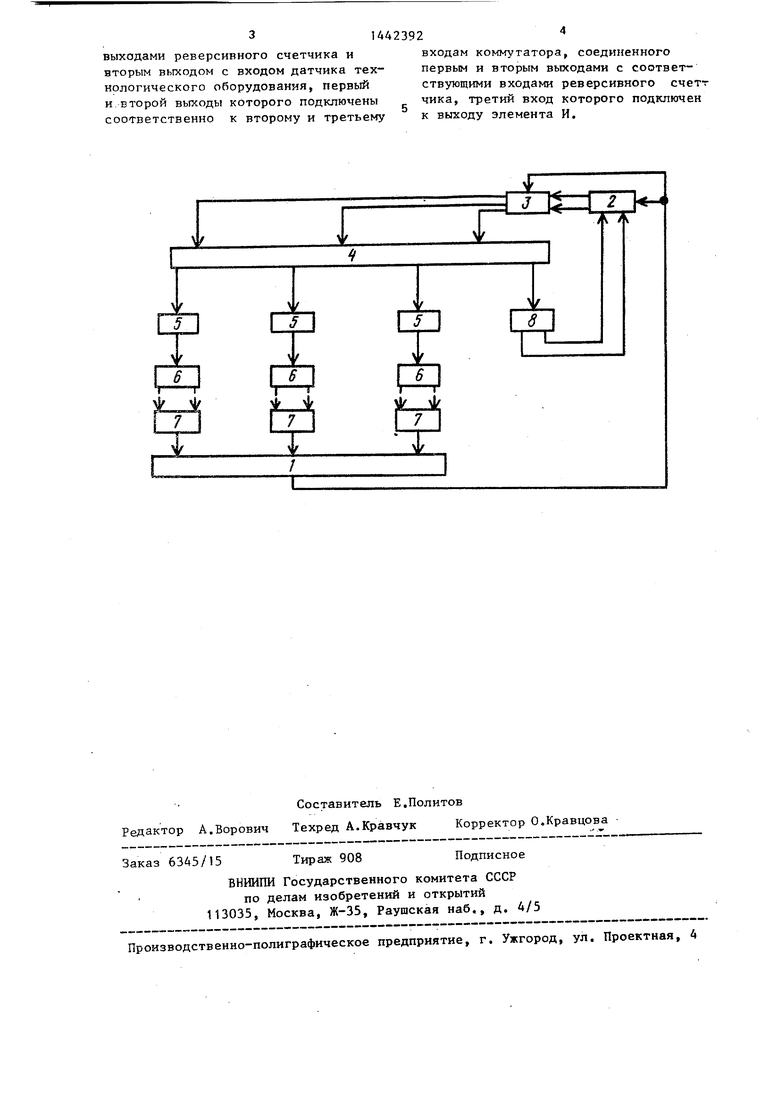
На чертеже представлена функциональная схема устройства.
На схеме показаны элемент И 1, комммутатор 2, реверсивный счетчик 3 блок 4 задания программы, триггер 5 гфивода 6, датчики 7 положения, дат- чик 8 технологического оборудования
Устройство работает следующим образом,
Из блока 4 на триггер 5 (например, Т триггер требуемой регуш-руе- мой координаты выдается уровень логической 1, устанавливая триггер 5 в единичное состояние. Начинается отработка привода 6 требуемой координаты, в результате чего с датчика 7 положения поступает уровень логи
ческого О , Этот уровень через элемент И 1 и коммутатор 2 поступает iia су1 1ьш:рующий вход реверсивного счет шка-З кадров и на его тактирую- 1Ш-1Й вход 5 блокируя выдачу и изменение адреса ячейки памяти блока 4„
На выходе блока А устанавливаются по всем разрядам уровни логического О. По окончании движения заданной координаты с датчика 7 положения поступает уровень логической 1, На время отработки координаты триггер 5 не изменяет своего состояния. Прн- 40 шедший с датчика 7 положения уровень логической i. через элемент И 1 и коммз -татор 2 поступает на суммирующий и тактовый входы реверсивного счет25
напряжение и координата возвращается в исходное состояние.
При отработке кадра программы, в котбром выдается информация о реверсе программы, уровень логической 1
по соответствующему каналу через перекидной контакт датчика 8 технологического оборудования поступает на один из адресных- входов коммутатора 2s изменяя прохождение логических уровней с элемента И 1 таким образом, что теперь они поступают на вычитаю-.и щий вход реверсивного счетчика 3 и программа начинает возвра1цаться .к нулевой ячейке памяти. При этом повторная вьщача уровней логических единиц на входы триггеров 5 вызывает инвертирование движения соответствуютих координат и все они возвращаются в исходное положение, В нулевом кадре программы через датчик 8 техноло- гШ -ескогп оборудования уровень логической единицы из блока 4 поступает
на другой адресный вход коммутатора 2, в результате к выходу элемента И 1 подключается суммирующий вход реверсивного С атчика 3 и программа снова начинает выполняться до момента выдачи из блока 4 команды на реверс программы 1 Реверса программы может и - не быть в том случае5 если не поступит сигнал с блока 4 или не сработает датчик 8 технологического оборудования. Датчик 8 технологи-ческого оборудования необходим для создания реверса отдельных фрагментов программы или создания внутренних циклов в ней„
Формул
и 3 о о р е т е и и я
Устройство для программного управления манипулятором, содержащее блок задания программы, последовательно
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ТРАНСПОРТНО-ПОГРУЗОЧНЫМ МАНИПУЛЯТОРОМ | 1990 |
|
RU2009883C1 |
| Цикловая система программного управления манипулятором | 1990 |
|
SU1812100A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Система позиционного управления положением рабочего органа | 1990 |
|
SU1714573A1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
| Устройство управления многокоординатным механизмом | 1981 |
|
SU1001011A1 |
| Устройство для размерной настройки металлорежущего станка с устройством числового программного управления (чпу) | 1983 |
|
SU1303372A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для программного управления приводами | 1975 |
|
SU694836A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
Изобретение относится к области робототехники и может быть использовано при создании манипуляторов, работающих по заданной программе. Целью изобретения является упрощение устройства за счет исключения объема памяти, необходимого для осущестЕше- ния возвратных операций. Для этого в устройство, содержащее блок задания программы, элемент И, комьгутатор, приводы и датчики наложения, введены триггеры, датчик технологического оборудования, реверсивньп счетчик. Возврат манипулятора в исходное положение осуществляется с использованием уже записанной в памяти траектории движения, по которой совершалась загрузка технологического оборудования . 1 ил .
гшка 3, изменяя состояние его выходов.дд соединенные элемент И и KOMNryTarops В результате вьщается адрес следующей ячейки памяти блока 4, на выходе которого появляется информация следующего кадра программы, и цикл отработки повторяется. Если в следующем кад-а„ элемента И, о т л и ч а ю щ е- е с ре программы требуется вернуть только что отработанную координату в исходное состояние, то по тому же каналу на вход триггера 5 поступает уровень логической 1 и триггер 5 принимает координате триггер, выход которого
а также по каждой регулируемой координате привод5 связанный с датчиком положения, выход каждого из которых подключен к соответств тощег г ; входу
тем,.что, с целью улрощекия устройства, оно содержит датчик-технологического оборудования, реверсивный счетчик и по каждой регул1фуемой
исходное состояние, и следовательно, на его выходе появляется уровень логи ческого 0 % а с электромагнитного распределителя привода 6 снимается
соединенные элемент И и KOMNryTarops элемента И, о т л и ч а ю щ е- е с координате триггер, выход которого
а также по каждой регулируемой координате привод5 связанный с датчиком положения, выход каждого из которых подключен к соответств тощег г ; входу
соединенные элемент И и KOMNryTarops элемента И, о т л и ч а ю щ е- е с координате триггер, выход которого
тем,.что, с целью улрощекия устройства, оно содержит датчик-технологического оборудования, реверсивный счетчик и по каждой регул1фуемой
подключен к входу привода, а вход каждого из которых - к соответствую- щему первом у выходу блока задания программы, соедн1 енного вxoдa rя с
выходами реверсивного счетчика и вторым выходом с входом датчика технологического оборудования, первый и второй выходы которого подключены соответственно к второму и третьему
у
1442392
входам коммутатора, соедияенного первым и вторым выходами с соответствующими входами реверсивного счетт
чика, третий вход которого подключен к выходу элемента И.
| Цикловая система программного управления промышленным роботом | 1980 |
|
SU935877A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
