(5) ЦИКЛОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Цикловая система программного управления промышленным роботом | 1983 |
|
SU1151927A2 |
| Цикловая система программногоупРАВлЕНия пРОМышлЕННыМ РОбОТОМ | 1978 |
|
SU807212A1 |
| Цикловая система программного управления манипулятором | 1976 |
|
SU621569A1 |
| Система контурного программного управления манипулятором | 1977 |
|
SU620368A1 |
| Позиционная система программного управления промышленным роботом | 1977 |
|
SU732819A1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
| Устройство для циклового управления промышленным роботом | 1982 |
|
SU1037211A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |
| Устройство для программного управления манипулятором | 1985 |
|
SU1315291A1 |
| Система программного управленияпРОМышлЕННыМ РОбОТОМ | 1978 |
|
SU807213A1 |
I
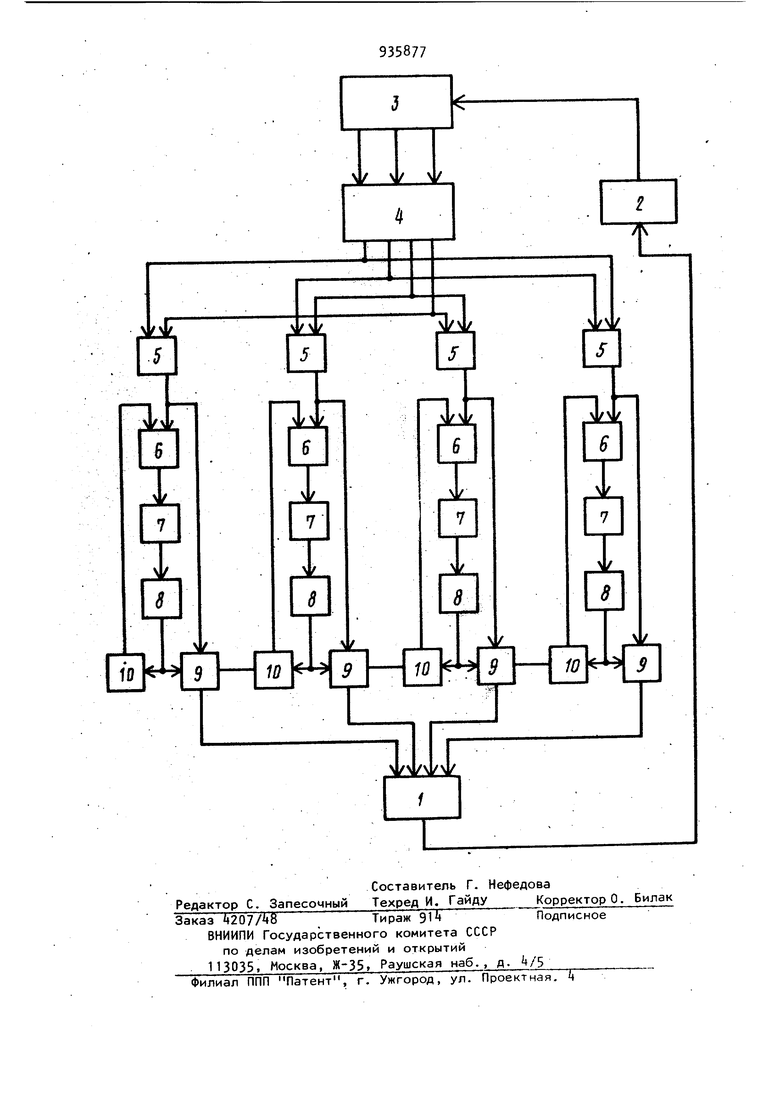
Изобретение относится к робототехнике и может быть использовано при создании цикловых систем управления промышленным роботом.
Известна цикловая система программного управления .промышленным роботом по авт. св. Н 807212, содержащая последовательно соединенные первый элемент И, коммут атор кадров и программоноситель и по каждой регулируемой координате последовательно соединенные привод, датчик положения и второй элемент И, выход каждого из которых подключен ко входам первого элемента И, а также дешифратор и по количеству регулируемых координат элемент ИЛИ, выход которого соединен со входёми привода и второго элемента И, а входы - с соответствующими выходами дешифратора, вход которого подключен к выходу программоносителя.
3 этой системе считывание двоичнокодированного номера п6ло)((ения схвата, записанного в кадре программного блока, происходит после установки этого кадра коммутатором по сигналу, сформированному в первом элементе И. Код считанного номера положения схвата поступает на входы дешифратора, с соответствующего выхода которого сигнал попадает через элементы ИЛИ на приводы, устанавливающие схват робота в требуемое положение,
10 а также на входы соответствующих вторых элементов И. Сигнал управления продолжает поступать с дешифратора на привод даже в том случае, если отработка данной координаты уже не требуется, поскольку сигнал с датчика положения извещает об окончании отработки приводом движения по координате. Управляющий сигнал будет снят с привода только при пере20ходе к следующему кадру программы, т.е. после окончания отработки приводом координаты, требующей наибольшего времени на исполнение движения. Это является недостатком системы, так как к увеличению потребле ния энергопитания приводов и соответственно к снижению ресурса их ра ты и надежности системы в целом. Цель изобретения - повышение надежности и снижение энергопотребления системы. Сущность изобретения заключается в том , что система содержит по каждой регулируемой координате инвертор и третий элемент И, через который выход элемента И подключен ко входу привода, а выход датчика положения через инвертор соединен со вторым входом третьего элемента И. На чертеже представлена функциональная схема системы. Система содержит первый элемент И 1, коммутатор 2 кадров, программо носитель 3, дешифратор k, элементы ИЛИ 5 третьи элементы И 6, привод ды 7) датчики 8 положений, вторые элементы И 9 инверторы 10. Система работает следующим образом. Считывание двоично-кодированного номера положения схвата робота, записанного в кадре программоносителя 3, происходит после устано ки этого кадра коммутатором 2 по сигналу, сформированному в первом элементе И 1. Код считанного номера положения схпата робота.поступает на входы дешифратора , с соответствующего выхода которого сигнал попадает через элементы ИЛИ 5 на входы соответствующих вторых элементов И 9 и через третьи элементы И 6 .на приводы 7| устанавливающие охват робота в требуемое положение 74 По приходе схвата робота в тре- ; буемое положение по каждой из регулируемых координат разрешающие уровни с датчиков 8 положения поступают через инвертор 10 на вход третьего элемента И 6, закрывая доступ сигналу с элемента ИЛИ 5 на привод 7 и на второй элемент И 9 и с его выхода далее на первый элемент И 1, на выходе которого после прихода разрешающих уровней с датчиков 8 положения всех регулируемых координат вырабатывается сигнал перехода к отработке следующего кадра программы. Применение изобретения позволяет уменьшить потребление энергопитания приводов и тем самым повысить ресурс их работы и увеличить надеж-, ность системы в целом. Формула изобретения Цикловая система программного управления промышленным роботом по авт. св. If 807212, о т л и чающаяся , что, с целью повышения надежности и снижения энергопотребления системы, содержит ПО каждой регулируемой координате инвертор и третий элемент И, через который выход элемента ИЛИ подключен к входу привода, а выход датчика положения через инвертор соединен с вторым входом третьего элемента И. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР V 807212, кл. G 05 В 19/00, В 25 J 9/00, 1978 (прототип)
