сл
Изобретение относится к оборудованию для горячей штамповки, а именно к роботизированным комплексам мтамповки на молотах.
Цель изобретения - повышение надежности за счет снижения нагрузок на руку робота.
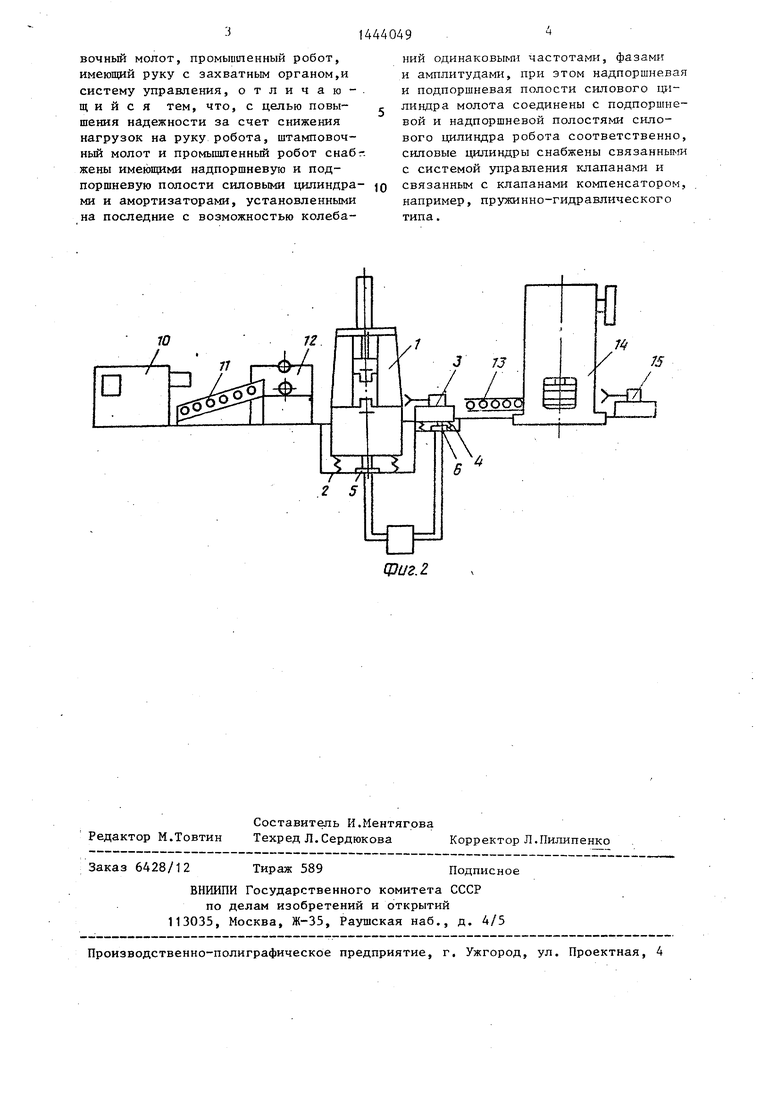
На фиг,1 изображен роботизирован- 1НЫЙ комплекс; на фиг.2 - автоматизи рованная линия горячей штамповки с Встроенным в нее роботизированным комплексом.
Роботизированный комплекс включает в себя штамповочньш молот 1, смонтированный на амортизаторах 2, промышленный робот 3, установленный на амортизаторах 4. Под молотом 1 установлен гидравлический цилиндр 5, а под роботом 3 - гидравлический цилиндр 6, причем разноименные полости цилиндров 5 и 6 соединены трубопроводами через клапаны 7, которые трубопроводами соединены с компенсатором 8, например 5 пружинно-гидрав- лического типа, и электрически связа ны с системой управления 9 комплексом. Комплекс встраивается в автоматизированные штамповочные линии. Автоматизированная штамповочная ли- НИН с роботизированным комплексом () включает в себя нагреватель 10, транспортер 11 и ковочные вальцы 12, роботизированный комплекс (молоты ) 5 робот 3), транспортер 13, обрезной пресс 14 и робот-обрез- чик 15.
Автоматизированная штамповочная линия с роботи зированным комплексом работает следующим образом.
Заготовки от нагревателя 10 (фиг. с помощью транспортера 11 подаются к ковочным вальцам 12 и далее роботом 3 укладываются в заготовительньй ручей штампа.
I
Для уменьше1шя времени цикла специальный захват робота 3 вводится в вьтолненное в штампе в зоне за усе ничной канавки поднутрение и после появления облоя захватывает за него поковку. При этом обеспечивается механическая связь молота 1 с роботом 3. При ударе молот 1 смещается на амортизаторах 2 вниз и вверх от полжения равновесия. Взаимодействуя со штоком и поршнем гидроцилиндра 5, молот 1 при перемещении вытесняет рабочую жидкость из подпоршневой ил надпоршневой полостей цилиндра 5,
Избыток рабочей жидкости переходит, соответственно, в надпоршневую или подпоршневую полость цилиндра 6, вызывая движение робота 3 на амортизаторах 4. Робот 3 начинает движение практически одновременно с молотом 1j так как время пробега волны возмущения по трубопроводам, соединяющим цилиндры 5, 6 при длине трубопровода 5 м и скорости волны 1 200 м/с, составляет 4-10 с. Молот 1 за это время успевает сместиться не более чем на 1,6-10 м, двигаясь после удара со скоростью 0,4 м/с. Эта величина находится в пределах допустимого перемещения руки робота 3. Диаметры цилиндров 5 и б подбираются таким образом, чтобы начальная скорость движения робота 3 быпа равна скорости движения молота 1. Так как парциальные частоты колебаний робота 3 на амортизаторах 4 и молота 1 на амортизаторах 2 равны, молот 1 и робот 3 двигаются синхронно, до момента окончания штамповки и освобождения поковки из штампа. Роботом 3 П1тамповка в ориентированном положении подается на транспортер 13, для чего робот 3 останавливают. Для этого от системы управления 9 подается сигнал на клапан 7, которьй прерывает связь с ш-шиндрами 5, 6, замыкая объем жидкости в трубопроводе, связывающем клапан 7 с цилиндром 6 и соединяя полость Цилиндра 5 с компенсатором 8, так как жи дкост
}не сжимается, колебания робота 3 прекращаются, после чего поковка укладывается на транспортирующее устройство 13, а по нему к обрезному прессу 14 и роботу-обрезчику 15. После укладки заготовки на транспортирующее устройство 13 молот 1 может продолжать штамповку следующей заготовки в предварительных ручьях.
Изобретение позволяет снизить вибрации, создаваемые молотом, за счет установки кузнечной машины на амортизаторы, .механизировать и автоматизировать процесс штамповки за счет использования промьшшенных роботов, устанавливаемых на амортизаторы, что синхронизирует послеударные колебания молота и руки робота,уменьшая нагрузки на узел крепления руки робота. Формула изобретения
Роботизированный комплекс горячей штамповки, содержащий штамповочный молот, промьшиенный робот, имеющий руку с захватным органом,и систему управления, отличаю-, щ и и с я тем, что, с целью повышения надежности за счет снижения нагрузок на руку робота, штамповоч- ньй молот и промьшшенный робот снабжены имеющими надпоршневую и под- поршневую полости силовыми цилиндрами и амортизаторами, установленными на последние с возможностью колеба
НИИ одинаковыш частотами, фазами и амплитудами, при этом надпоршневая и подпоршневая полости силового цилиндра молота соединены с подпоршне- вой и надпоршневой полостями силового цилиндра робота соответственно, сиповые цилиндры снабжены связанными с системой управления клапанами и связанным с клапанами компенсатором, например, пружинно-гидравлического типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ГОРЯЧЕЙ ШТАМПОВКИ КРУПНЫХ ПОКОВОК С ВЫТЯНУТОЙ ОСЬЮ | 2003 |
|
RU2262436C2 |
| Автоматическая линия горячей штамповки | 1981 |
|
SU996037A1 |
| Автоматическая линия горячей штамповки | 1982 |
|
SU1060292A1 |
| Автоматическая линия горячей штамповки | 1987 |
|
SU1505660A1 |
| Автоматизированная линия горячей штамповки крупных поковок с вытянутой осью | 1991 |
|
SU1822353A3 |
| Автоматическая линия горячей штамповки | 1977 |
|
SU733843A1 |
| Автоматическая линия горячей штамповки | 1981 |
|
SU1026920A1 |
| Автоматизированная линия горячей штамповки | 1982 |
|
SU1053948A1 |
| Автоматическая линия для горячей штамповки заготовок | 1983 |
|
SU1087241A1 |
| Автоматическая линия горячей штамповки | 1981 |
|
SU990394A1 |
Изобретение относится к оборудованию для горячей штамповки,а именно к роботизированным комплексам штамповки на молотах. Цель изобретения - повышение надежности за счет снижения нагрузок на руку робота. Промьшшенный робот и молот снабжены силовыми цилиндрами и амортиза тора- ми. Циливдры связаны с.клапанами компенсатором. При ударе молот 1 Смещается на амортизаторах 2 вниз и вверх. За счет этого жидкость из си- лового цилиндра 5 вытесняется з по- i лость цилиндра 6, вызывая движение робота 3 на амортизаторах 4. Обеспечивается синхронизация колебаний промышленного робота и молота. 2 ил.
10
г
/ 15 TiZL
Фиг. 2
| Автоматическая линия горячей штамповки | 1980 |
|
SU925511A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
