ff/ff/Z6
AQ fj
f8
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085804A1 |
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ ПРОМЫШЛЕННОГО РОБОТА | 2022 |
|
RU2785421C1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Установка для изготовления кера-МичЕСКиХ фОРМ пО ВыплАВляЕМыММОдЕляМ | 1979 |
|
SU839655A1 |
| Оправка для закрепления крупногабаритных изделий | 1977 |
|
SU654489A1 |
| УСТАНОВКА ДЛЯ ГРАДУИРОВКИ И КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2008 |
|
RU2364718C1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
Изобретение относится к области машиностроения, в частности к промышленным роботам для автоматизации технологических операций. Цель изобретения - з меньшение энергозатрат за счет разгрузки привода качания плеча от статического момента, создаваемого массой руки при переменном ее вылете. При включении привода 14 начинается вращение червяка 6 и его обкатка вокруг червячного колеса 3, закрепленного на поворотной платформе 2 основания I. При нарушении статической балансировки механической руки относительно оси 4 плечо 5 смещается вдоль оси червяка, при этом фланец 10 взаимодействует с чувствительным элементом одного из датчиков 11 или 12, после чего включается привод 15, перемещающий уравновещиваю- щую массу вдоль -плеча 5 механической § руки. 3 ил,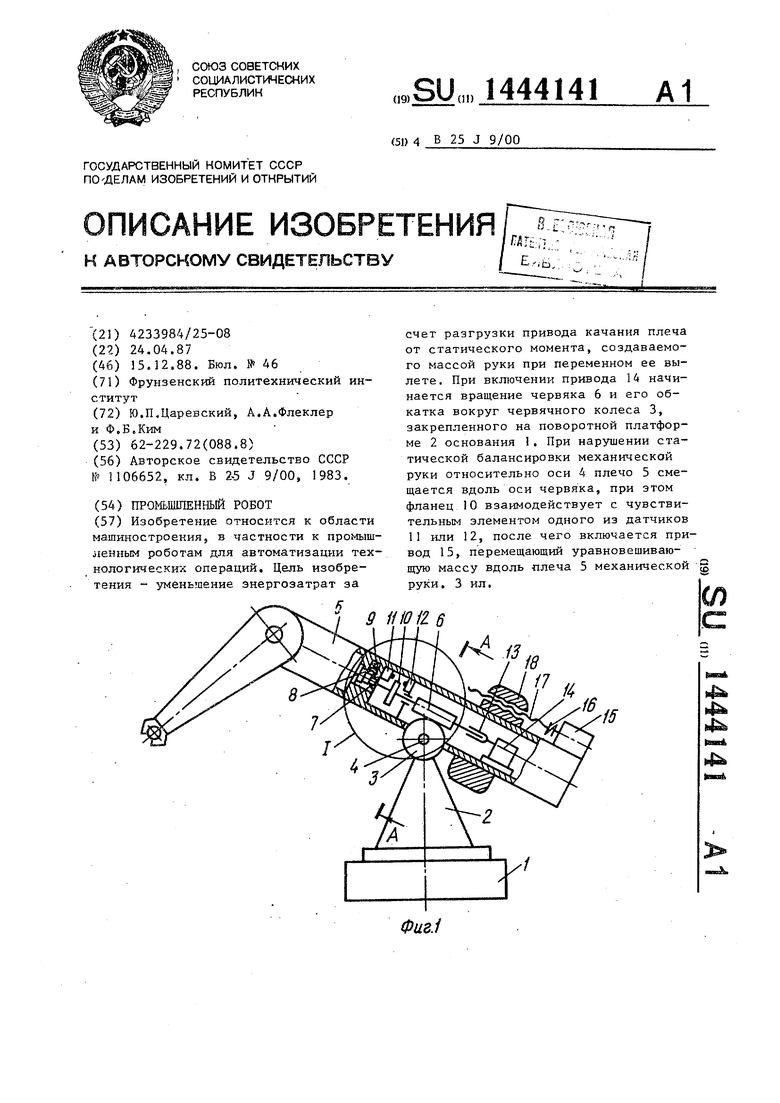
Фиг.1
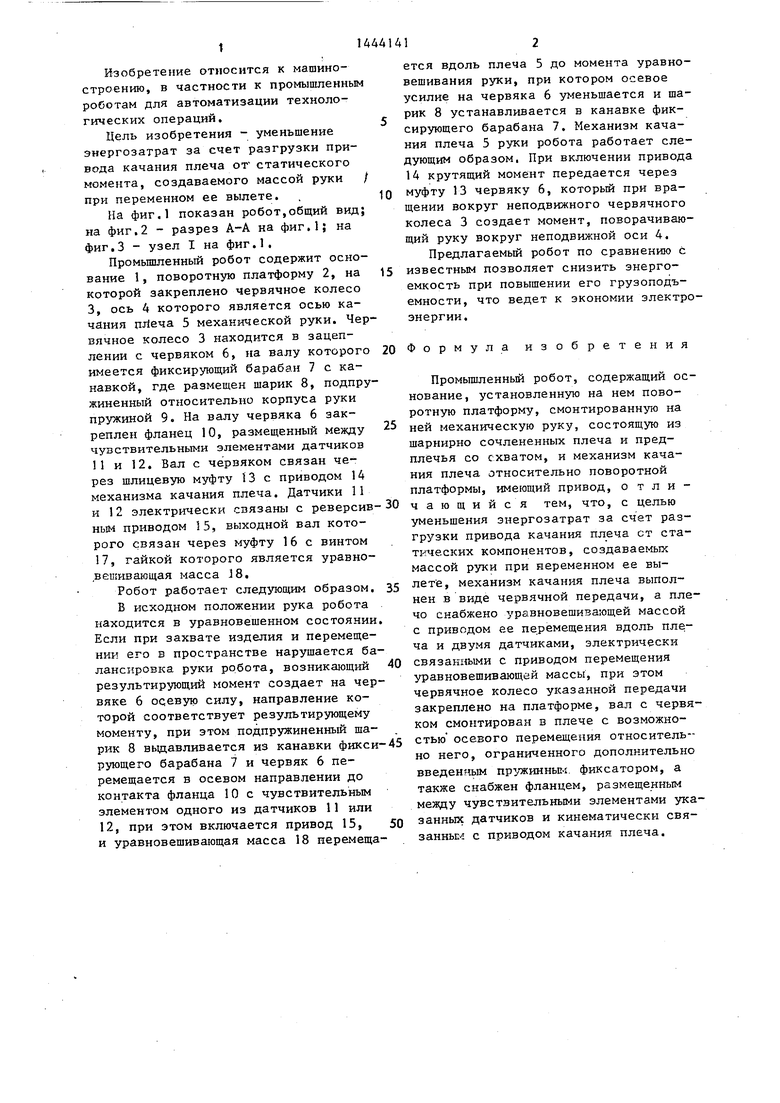
Изобретение относится к машиностроению, в частности к промышленным роботам для автоматизации технологических операций.
Цель изобретения - уменьшение энергозатрат за счет разгрузки привода качания плеча or статического момента, создаваемого массой руки / при переменном ее вылете. .
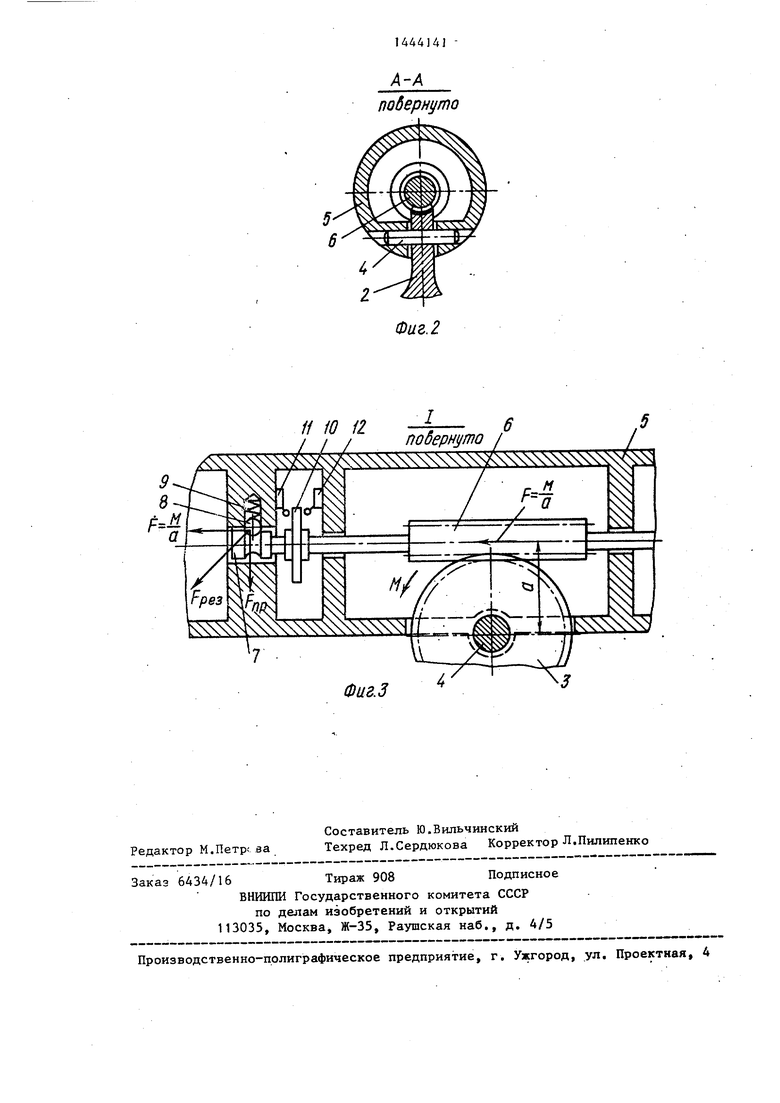
На фиг.1 показан робот,общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - узел I на фиг.1.
Промьшшенный робот содержит основание 1, поворотную платформу 2, на которой закреплено червячное колесо 3, ось 4 которого является осью качания 5 механической руки. Червячное колесо 3 находится в зацеплении с червяком 6, на валу которого имеется фиксирующий барабан 7 с канавкой, где размещен шарик 8, подпружиненный относительно корпуса руки пружиной 9. На валу червяка 6 закреплен фланец 10, размещенный между чувствительными элементами датчиков 11 и 12. Вал с червяком связан через шлицевую муфту 13 с приводом 14 механизма качания плеча. Датчики 11 и 12 электрически связаны с реверсив ным приводом 15, выходной вал которого связан через муфту 16 с винтом 17, гайкой которого является уравновешивающая масса 18,
Робот работает следующим образом.
В исходном положении рука робота находится в уравновешенном состоянии Если при захвате изделия и перемещении его в пространстве нарушается балансировка руки робота, возникающий результирующий момент создает на червяке 6 осевую силу, направление которой соответствует результирующему моменту, при зтом подпружиненный шарик 8 выдавливается из канавки фшсси рующего барабана 7 и червяк 6 перемещается в осевом направлении до контакта фланца 10 с чувствительным элементом одного из датчиков 11 или 12, при этом включается привод 15, и уравновешивающая масса 18 перемещается вдоль плеча 5 до момента уравновешивания руки, при котором осевое усилие на червяка 6 уменьшается и шарик 8 устанавливается в канавке фиксирующего барабана 7. Механизм качания плеча 5 руки робота работает следующим образом, При включении привода 14 крутящий момент передается через муфту 13 червяку 6, который при вращении вокруг неподвижного червячного колеса 3 создает момент, поворачивающий руку вокруг неподвижной оси 4.
Предлагаемый робот по сравнению с известным позволяет снизить энергоемкость при повышении его грузоподъемности, что ведет к экономии электроэнергии.
Формула изобретения
Промьш1ленный робот, содержащий основание, установленную на нем поворотную платформу, смонтированную на ней механическую руку, состоящую из шарнирно сочлененных плеча и предплечья со охватом, и механизм качания плеча относительно поворотной платформы, имеющий привод, отличающийся тем, что, с целью уменьшения энергозатрат за счет разгрузки привода качания плеча ст статических компонентов, создавае1-1ых массой руки при неременном ее вы- лет е, механизм качания плеча выполнен в виде червячной передачи, а плечо снабжено уравновешивающей массой с приводом ее перемещения вдоль плеча и двумя датчиками, электрически связанными с приводом перемещения уравновешивающей массы, при этом червячное колесо указанной передачи закреплено на платформе, вал с червяком смонтирован в плече с возможностью осевого перемещения относительно него, ограниченного дополнительно введен г ь1М пружинньЕ-s. фиксатором, а также снабжен фланцем, размещенным между чувствительными элементами указанных датчиков и кинематически свя- saHHbEvi с приводом качания плеча.
а W 12 -4 i
/ / /nooepHijmo /
7
Фиг.З
А-А побернуто
Фиг. 2
| Манипулятор | 1983 |
|
SU1106652A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
