Изобретение относится к машиностроению, а именно к кривошипно-ползун- ным преобразователям вращательного движения в возвратно-поступательное с регулируемым ходом ведомого звена, и может быть использовано в станкостроении я приводах строгальных станков.
Цель изобретения - расширение диапазона регулирования хода ведомого звена и повьшение точности регулирования.
На чертеже показана конструктивная схема предлагаемого механизма.
Механизм содержит основание 1с выполненными в нем основной прямолинейной направлякнцей 2 и вспомогательной прямолинейной направляющей 3,установленный на основании t кривошип 4 в виде, например, диска, в радиапь- ном пазу .5 которого установлен с возможностью перемещения и фиксации кривошипный палец 6, установленный в направляквцей 2 рабочий ползун 7 (являющийся выходным звеном механизма), установленный в направлякяцей 3 с возможностью перемещения и фиксации в требуемом положении регулировочный ползун 8, шарнщ но связанный одним концом с кривошипным пальцем 6 пер- вый шатун, второй щатун 10, шарнирно связанный одним концом с другим концом первого шатуна 9, а другим концом - с рабочим ползуном 7, и коромысло 11, шарнирно связанное одним концом с регулировочным ползуном 8, а другим концом - с общим шарниром шату нов 9 и 10. Для перемещения и фиксаци ползуна 8 механизм снабжен, например, винтовым механизмом 12.
Механизм работает следующим образом.
Вращение кривошипа 4 через шатуны 9 и 10 преобразуется в возвратно-посг
тупательное перемещение ползуна 7, при этом коромысло 11 совершает колебательное движение. Для изменения и i смещения амплитуды хода ползуна 7 изменяют длину кривошипа 4 за счет перемещения и закрепления пальца 6 в пазу 5 или перемещают в новое положение с помощью винтового механизма 12 ползун 8 в направляющей 3, или производят одновременные перемещения кривошипного пальца 6 и ползуна 8.
Формула изобретения
1.Кривошипнр-ползунньй механизм с регулируемым ходом ползуна, содержащий основание с выполненными в нем двумя прямолинейными направляющими, установленный на основании кривошип, установленные в соответствующих направляющих рабочий и регулировочный ползуны, шарнирно связанный од ним концом с кривошипом осевой .шатун и
второй шатун, шарнирно связанный одним концом с другим концом осевого шатуна, а другим концом - с рабочим ползуном, отличающийся тем, что, с целью расширения диапазона регулирования хода ведомого звена, кривошип выполнен регулируемой длины, регулировочный ползун установлен с возможностью фиксации в заданном положении, а механизм снабжен коромыслом, шарнирно связанным одним концом с регулировочным ползуном, а другим концом - с общим шарниром шатунов.
2.Механизм поп.1, отличающийся тем, что, с целью повышения точности регулирования, средство перемещения и фиксации регулировочного ползуна выполнено в виде винтового механизма.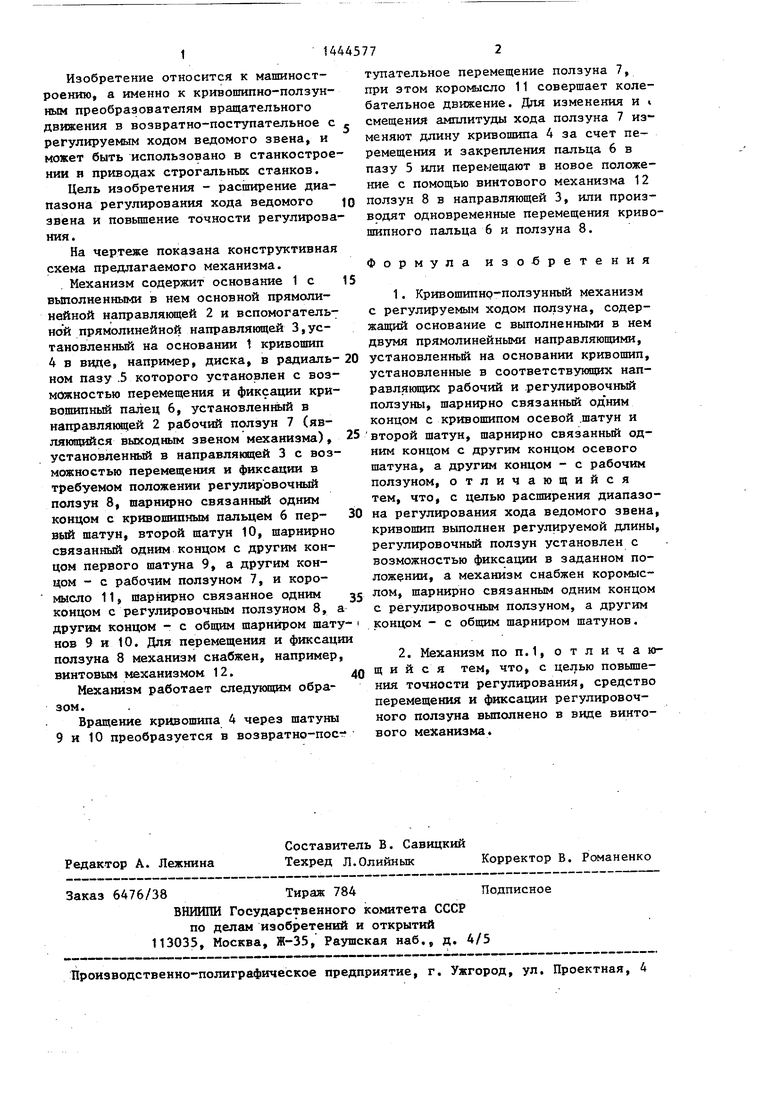
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для продораживания коллекторов электрических машин | 1987 |
|
SU1525788A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1996 |
|
RU2110718C1 |
| Кривошипно-ползунный механизм | 1987 |
|
SU1442762A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1990 |
|
RU2017038C1 |
| Эксцентриковый кривошипно-ползунный механизм с регулируемым ходом ползуна | 1987 |
|
SU1523798A1 |
| Зубчато-рычажный ползунный механизм | 1986 |
|
SU1430643A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Кривошипно-ползунный механизм | 2017 |
|
RU2655124C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2149298C1 |
| Кривошипно-ползунный механизм с регулируемой остановкой | 1988 |
|
SU1594331A1 |
Изобретение относится к криво- шипно-ползунным преобразователям вращательного движения в возвратно-поступательное с регулируемым ходом ведо 8 Г2 мого звена и найдет применение в частности, в приводах строгальных станков. Цель изобретения - расширение диапазона регулирования хода ведомого звена. Вращение кривошипа 4 через шатуны 9 и 10 преобразуется в возвратно-поступательное движение ползуна 7. Изменение и смещение амплитуды его хода производятся перестановкой кривошипного пальца 6 в пазу 5 диска 4 или перемещением в новое положение ползуна 8, с которым одним концом шарнирно связано коромысло 11, или одновременным перемещением пальца 6 и ползуна 8. 1 з.п. ф-лы, 1 ил. о (О (Л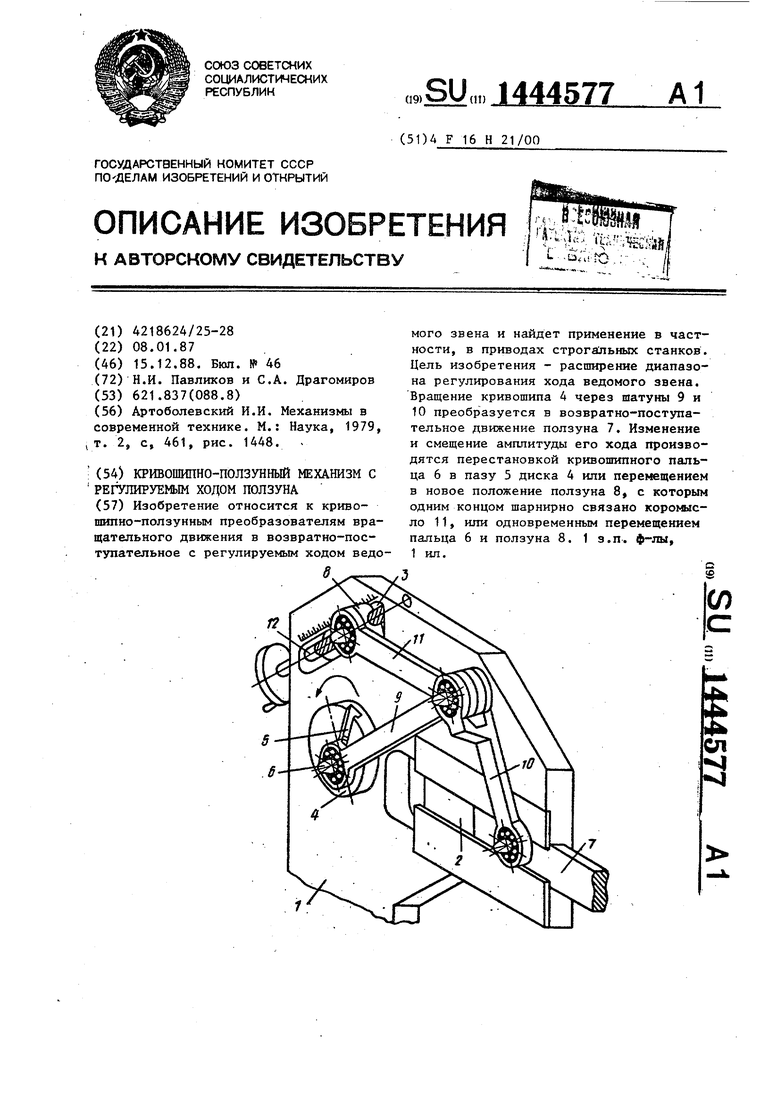
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| М.: Наука, 1979, , т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления препаратов для мытья | 1923 |
|
SU1448A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
