2 J
4 СД
О
СП
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ КОЛЕЦ ПОДШИПНИКОВ | 1991 |
|
RU2016673C1 |
| Устройство для сборки комплекта деталей | 1987 |
|
SU1504054A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Устройство для сборки корпусных деталей с комплектующими | 1988 |
|
SU1511042A1 |
| УСТРОЙСТВО ДЛЯ СЪЕМА ИЗДЕЛИЙ С КОНВЕЙЕРА И ИХ УКЛАДКИ В ТАРУ | 2014 |
|
RU2549319C1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| Автоматический укладчик валов | 1986 |
|
SU1399066A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Устройство для подготовки радиоэлементов к монтажу | 1988 |
|
SU1704306A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
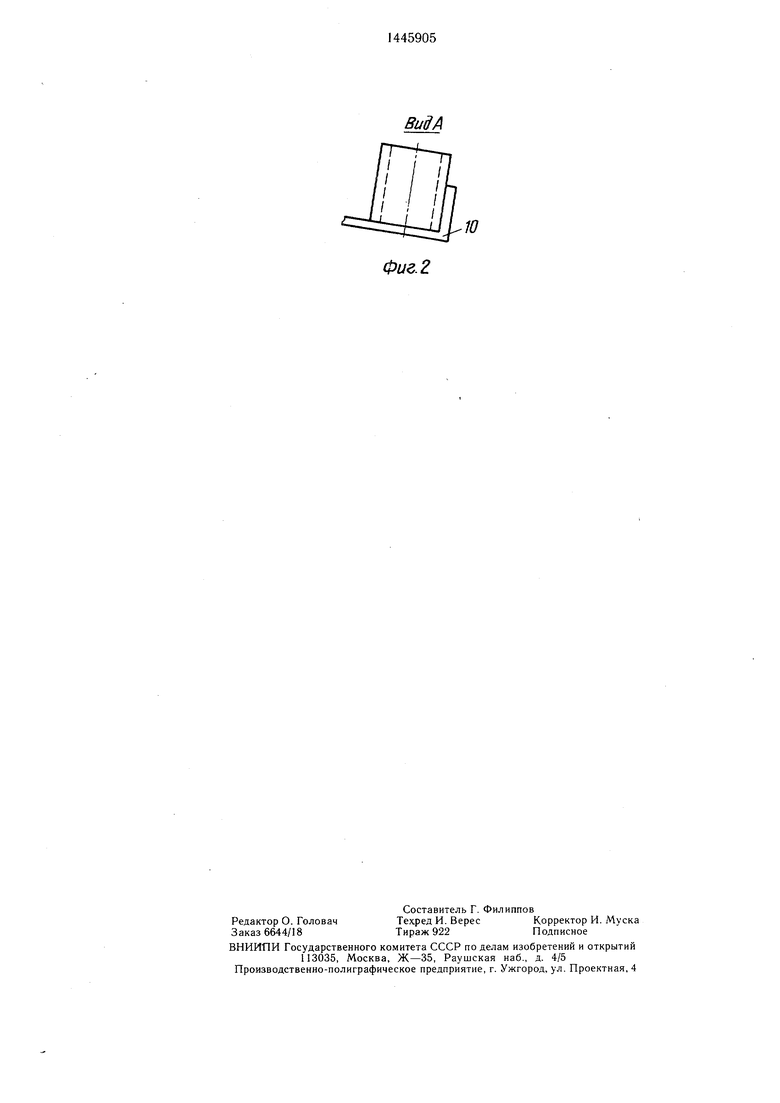
Изобретение относится к робототехнике. и может быть использовано при конструировании манипуляторов, преимущественно синхроманипуляторов, предназначенных для работы с мелкими деталями типа втулок. Целью изобретения является повышение производительности устройства за счет исключения дополнительного перемещения захвата в вертикальной плоскости. Детали типа втулок подаются на лоток 10. Цилиндр 8 ударяет в упругую пластину 11, и втулка 14, занимающая крайнее положение, под действием удара надевается на захват 2, выполненный в виде изогнутого стержня. Рука I перемещается в требуемое положение, и втулка 14 сходит с захвата под действием струи сжатого воздуха, поданной через сопло 4. 2 ил.
Фиг.
Изобретение относится к робототехнике и может быть использовано при конструировании манипуляторов, преимущественно микроманипуляторов, предназначенных для работы с мелкими деталями типа втулок.
Целью изобретения является повышение производительности за счет исключения дополнительного перемещения захвата в вертикальной плоскости.
На фиг. 1 представлено загрузочное устройство, общий вид; на фиг. 2 - вид А на фиг. 1.
Загрузочное устройство содержит руку 1 с установленным на ней захватом 2, имею- ,щим вид изогнутого стержня, снабженным упором 3 и соплом 4, соединенным с источником 5 сжатого воздуха. Рука 1 установлена на механизме 6 подъема, связанном с механизмом 7 перемещения. К источнику 5 сжатого воздуха подключен выносной блок поштучного надевания втулок на зах- , ват. Выносной блок поштучного надевания втулок на захват состоит из цилиндра 8, содержащего боек 9, и лотка 10 с закрепленной на конце упругой пластиной 11 и упорами 12 и 13, причем лоток 10 на всем протяжении имеет буртик, удерживающий втулки в крайнем положении за счет наклона лотка (фиг. 1).
Упор 12 служит для фиксации положения втулки на упругой пластине 11. Упор 13 установлен с небольшим зазором над втулками 14 так, что край его находится над второй от упора 12 втулкой. Настройка упоров 12 и 13 не требует большой точности. Упор 12 выставляется так, что конец захвата располагается в пределах отверстия втулки, а настройка упора 13 производится в достаточно щироком диапазоне кик в горизонтальном, так и в вертикальном направлении, что позволяет практически без перестройки упоров 12 и 13 применять загрузочное устройство для работы с широкой номенклатурой втулок.
Цилиндр 8 ударного элемента расположен под упругой пластиной 11 с таким расчетом, что боек 9 имеет возможность ударять в упругую пластину 11.
Загрузочное устройство работ ает следующим образом.
Втулки из устройства первичной ориентации (не показано) подаются на лоток 10,
где перемещаются вдоль буртика до упора 12. Из источника 5 сжатого воздуха подается порция воздуха в цилиндр 8. Боек 9 начинает движение вверх и ударяет в упругую
пластину 11, при этом втулка 14, занимающая крайнее положение, под действием удара надевается на захват 2, где перемещается по инерции до упора 3 и остается на горизонтальной части захвата 2. Боек 9 после прекращения подачи воздуха в цилиндр 8
возвращается в исходное положение.
Рука 1 перемещается в требуемое положение и втулка сходит с захвата под дей-. ствием струи воздуха, поданной через сопло 4 из источника 5 сжатого воздуха. Следующая втулка на лотке 10 под напором потока втулок занимает положение у упора 12, и загрузочное устройство готово к захвату следующей втулки.
Загрузочное устройство может быть эффективно использовано для установки издеЛИЙ типа втулок на технологическое оборудование или на загрузке в тару там, где требуется изделие установить в гнездо или надеть на стержень, причем как захватывание втулок, так и помещение их на требуемое оборудование может производиться без ходов механизма подъема вверх-вниз, что позволяет повысить производительность при использовании манипулятора на данных операциях.
30
Формула изобретения
Загрузочное устройство, содержащее основание, подающий лоток с упором, размещенным на основании, механизм подачи детали, механизм перемещения детали с захватом, установленный на основании с возможностью поворота в горизонтальной плоскости, и сбрасыватель детали, отличающееся тем, что, с целью повышения производительности, механизм подачи детали выполнен в
виде бойка, установленного с возможностью возвратно-поступательного перемещения в вертикальной плоскости и взаимодействия с дополнительно введенной упругой пластиной, размещенной на дне подающего лотка, при
этом захват выполнен в виде изогнутого стержня с регулируемым упором, а сбрасыватель - в виде размещенного на стержне сопла, соединенного с дополнительно введенным источником сжатого воздуха.
Фиг. 2
| Загрузочно-разгрузочное устройство | 1981 |
|
SU1006165A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
