Изобретение относится к машиностроению и может быть использовано в качестве захватного органа робота-манипулятора.
Целью изобретения является расширение функциональных возможностей вакуумных захватных устройств путем компенсации погрешностей позиционирования.
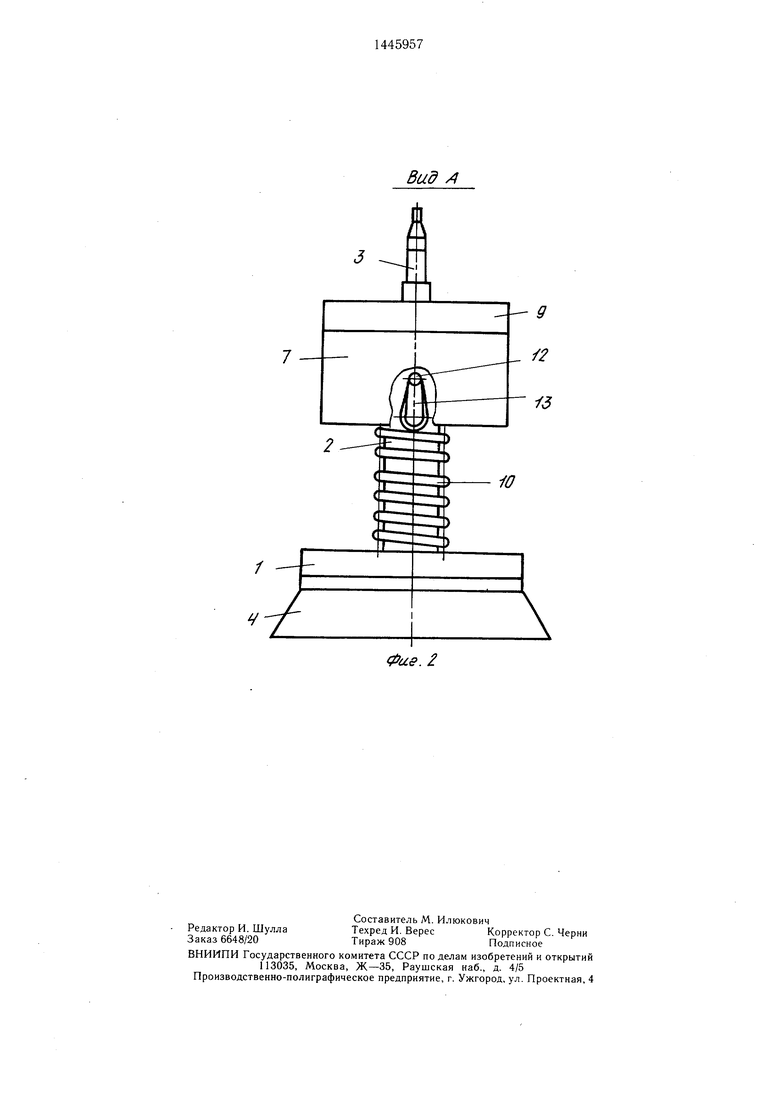
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. 1.
Вакуумное захватное устройство содержит корпус 1, закрепленный на пустотелом стержне 2 со штуцером 3. Кольцевая вакуумная присоска 4, прикрепленная к нижней части корпуса винтами 5, имеет рабочую полость 6, соединенную с источником ва- куумирования. Боковые стенки присоски 4 имеют переменную толщину В основании 7, связанном с рукой промышленного робота, установлена втулка 8 со сферической наружной поверхностью. Втулка 8 фиксируется в основании 7 при помощи втулки 9, имеющей коническую внутреннюю поверхность. Стержень 2 размещен в сквозных отверстиях втулок 8 и 9 и подпружинен пружиной 10, размещенной между корпусом 1 и основанием 7 К основанию 7 с помощью винта 11 крепится цилиндрический палец 12, свободный кон.ец которого имеет форму полусферы. На наружной поверхности стержня 2 параллель- . но его оси выполнен паз 13, расширяющийся в нижней своей части. Палец 12 расположен в боковом конусном отверстии 14 втулки 8.
Устройство работает следующим образом.
При опускании захвата на захватываемое изделие стержень 2 перемещается вдоль втулки 8 и конический хвостовик выходит из конического отверстия втулки 9. За счет перемещения стержня 2 вверх также происходит смещение свободного конца пальца 12 в нижнюю щирокую часть паза 13. Поскольку меньший диаметр бокового отверстия 14 больше, чем диаметр пальца 12 втулка 8 получает возможность вращения относительно основания 7. В результате корпус 1 может поворачиваться вместе со стержнем 2, что и обеспечивает плотное прилегание,присоски 4 к захватываемому изделию. Форма стенок присоски 4 позволяет при этом избежать деформации изделия. Затем через штуцер 3 осуществляется подвод вакуума и изделие захватывается.
При поднятии захвата пружина 10 возвращает корпус 1 в исходное положение, а палец 12 смещается в узкую часть паза 13, фиксируя стержень 2 от проворота вокруг соей оси. После переноса изделие сбрасывается, для чего отключается источник вакуу- мирования.
Формула изобретения
1.Вакуумное захватное устройство, содержащее основание и установленный на нем захватный элемент, на корпусе которого установлена кольцевая вакуумная присоска, рабочая полость которой соединена с источ5 НИКОМ вакуумирования посредством соответствующих каналов, а также устройство компенсации погрешности позиционирования, состояшее из подпружиненного стержня, имеющего средство стопорения от ароворота
Q вокруг собственной оси и конический хвостовик, размещенный в ответном посадочном отверстии основания, причем пружина расположена между основанием и корпусом захватного элемента, отличающееся тем, что, с целью расщирения функциональных воз5 можностей, оно дополнительно снабжено втулкой со сферической наружной поверхностью, размещенной в основании, в отверстии которой расположен подпружиненный стержень, а боковые стенки кольцевой ва„ куумной присоски имеют переменную толщину.
2.Устройство по п. 1, отличающееся тем, что подпружиненный стержень выполнен пустотелым и содержит в верхней части дополнительно введенный штуцер, соединен5 ный с источником вакуумирования, а в нижней части полость этого стержня соединена каналами с рабочей полостью присоски.
3.Устройство по пп. 1 и 2, отличающееся тем, что средство стопорения подпружиненного стержня от проворота содержит цилиндрический палец, жестко закрепленный на основании и размещенный перпендикулярно оси стержня в дополнительно выполненном боковом конусном отверстии втулки, а на подпружиненном стержне дополнительно вы5 полнен продольный паз, расширяющийся в нижней своей части, причем свободный конец пальца имеет форму полусферы, а меньший диаметр бокового конусного отверстия втулки больше, чем диаметр пальца.
Вид /I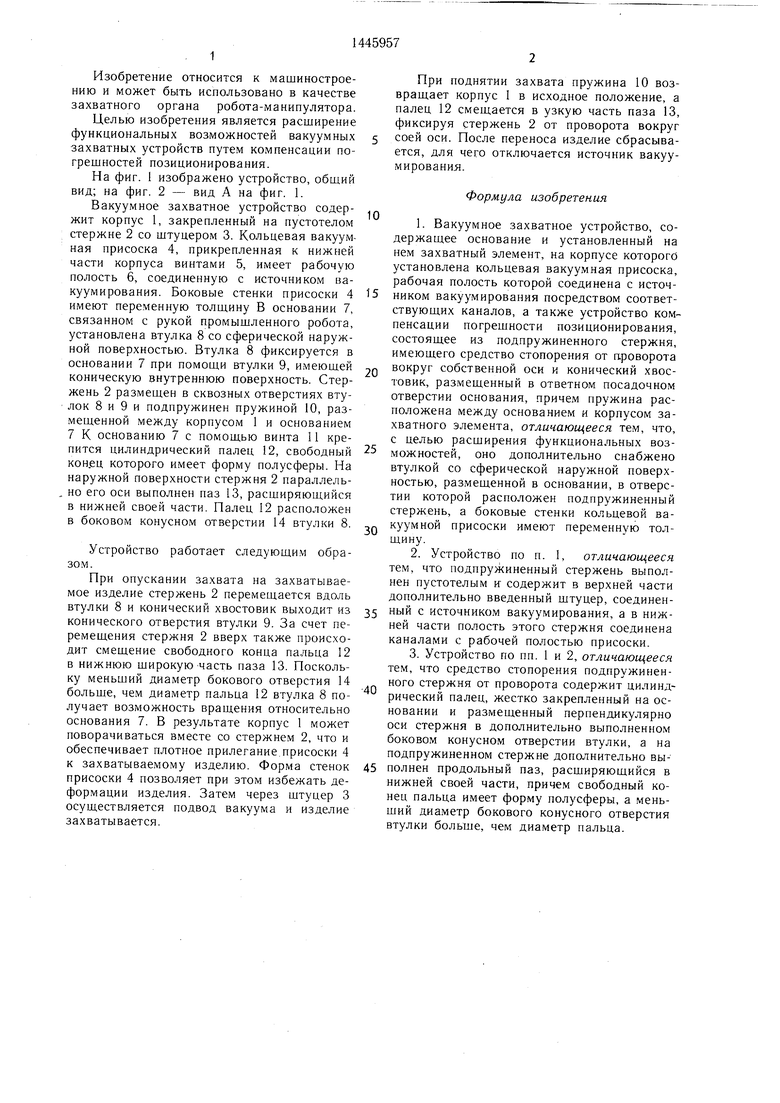
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный орган | 1980 |
|
SU946743A1 |
| Вакуумное захватное устройство | 1984 |
|
SU1187985A1 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| ГРУППОВОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1999 |
|
RU2170698C1 |
| Многопозиционный вакуумный захват | 1988 |
|
SU1662844A1 |
| Завинчивающий патрон стационарного устройства для сборки резьбовых соединений | 1982 |
|
SU1039682A1 |
| Вакуумный захватный орган | 1977 |
|
SU644579A1 |
| Вакуумное захватное устройство | 1989 |
|
SU1673436A1 |
| Захватное устройство | 1989 |
|
SU1699766A1 |
Изобретение относится к машиностроению и может быть использовано в качестве захватного органа робота манипулятора. Цель изобретения - расширение функциональных возможностей вакуумных захватных устройст в путем компенсации погрешностей позиционирования. Для этого в устФигЛ ройство, содержащее корпус 1, подпружиненный пустотелый стержень 2 и основание 7, введены кольцевая вакуумная присоска 4 с переменной толщиной стенок, втулка 8 со сферической наружной поверхностью, втулка 9 с конической внутренней поверхностью, а стержень 2 выполнен с хвостовиком и соединен со штуцером 3. Цилиндрический палец 12 размещен в боковом конусном отверстии 14 втулки 8. На стержне 2 выполнен продольный паз 13, расширяющийся внизу. При опускании на захватываемое изделие конический хвостовик стержня 2 выходит из конического отверстия втулки 9, за счет чего появляется возможность поворота корпуса 1 вместе со стержнем 2. Дополнительный эф- фект дает выполнение присоски 4 с пере.мен- ной толщиной стенок. 2 з.п. ф-лы, 2 ил & (Л сд со О1 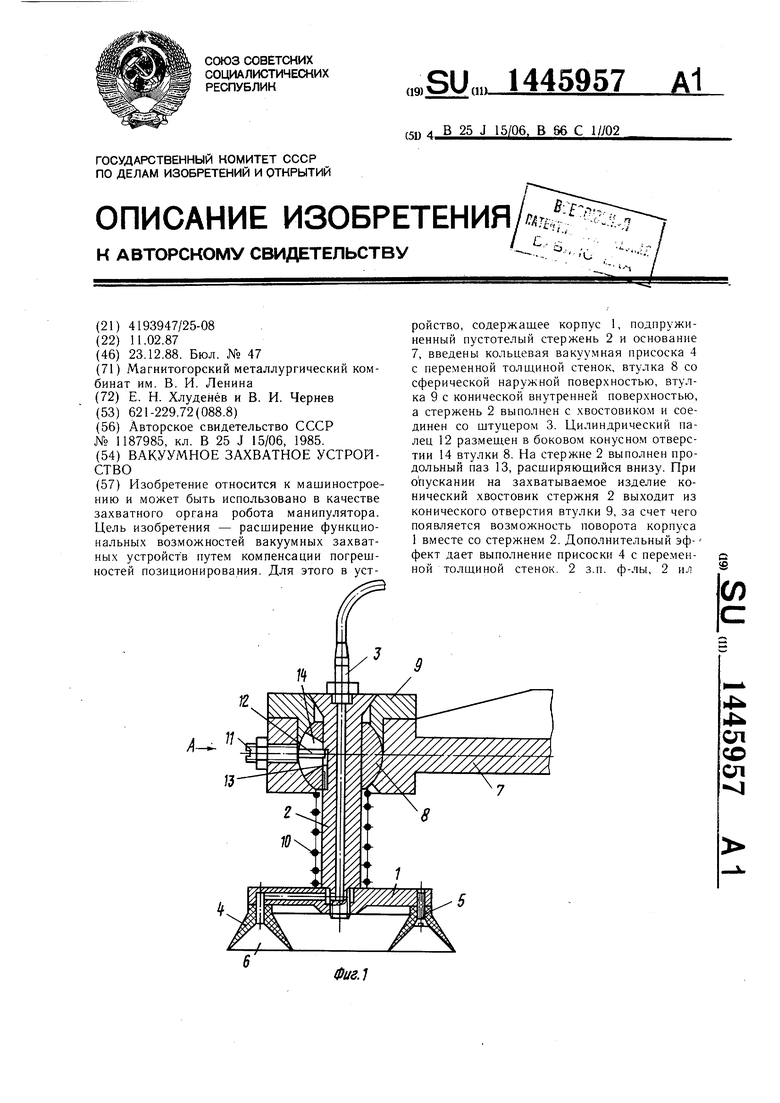
Фие.2
| Вакуумное захватное устройство | 1984 |
|
SU1187985A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
