.-я
Фиг1
ским фиксатором 9 вниз за счет смещения центра тяжести основания 8 относительно оси насадки 7. Вакуумные присоски 17 предназначены для захвата различных типов деталей 33. Тип определяется блоком 18 датчиков наличия детали, каждый из которых образован
парой излучатель - приемник излучения. При работе устройства сначала блок 18 определяет тип детали 33,а затем рука манипулятора поворачивает корпус 1 вокруг оси, пока необходимая вакуумная присоска 17 не установится напротив детали 33 6 ил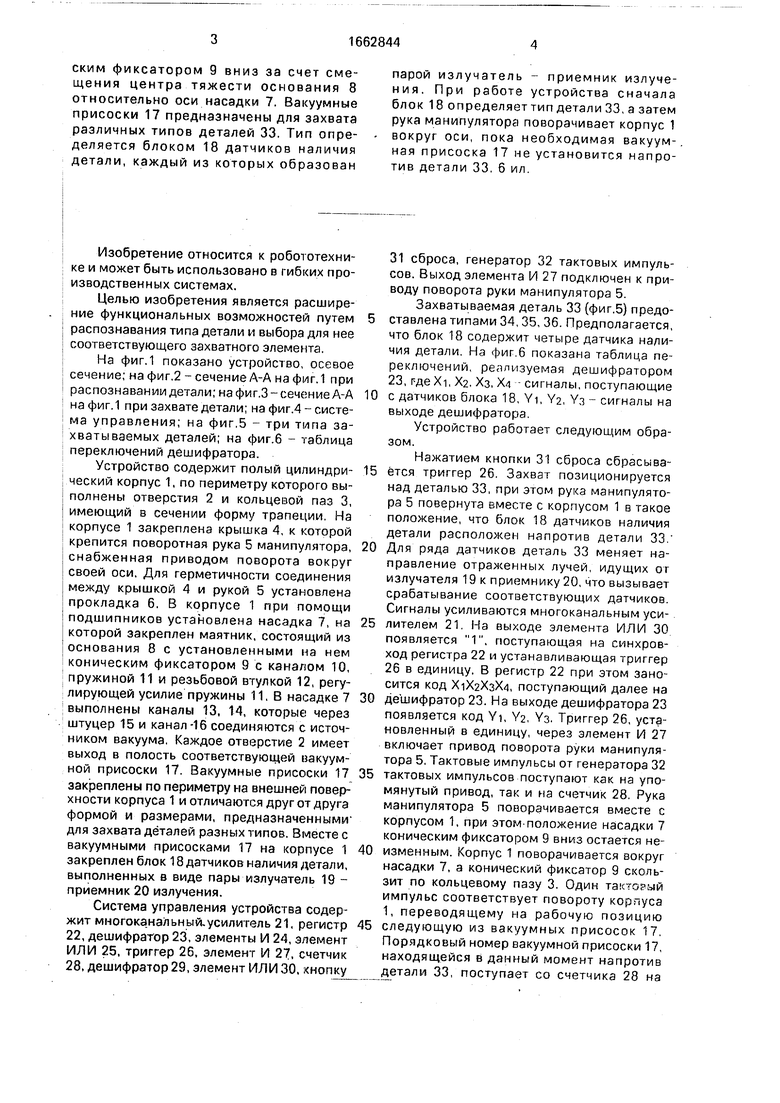
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Магнитно-вакуумный захват | 1991 |
|
SU1811486A3 |
| Автомат для сборки деталей | 1989 |
|
SU1639936A1 |
| Вакуумный захват | 1990 |
|
SU1771959A1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Вакуумный схват | 1986 |
|
SU1491702A1 |


Изобретение относится к робототехнике. Цель изобретения - расширение функциональных возможностей вакуумного захвата. Устройство содержит полый цилиндрический корпус 1 с кольцевым пазом 3 и отверстиями 2, соединяющими полость соответствующей вакуумной присоски 17 с источником вакуума через каналы 13, 14, выполненные в насадке 7, и канал 16, выполненный в поворотной руке 5 манипулятора. При вращении корпуса 1 вокруг его оси насадка 7 сохраняет положение коническим фиксатором 9 вниз за счет смещения центра тяжести основания 8 относительно оси насадки 7. Вакуумные присоски 17 предназначены для захвата различных типов деталей 33. Тип определяется блоком 18 датчиков наличия детали, каждый из которых образован парой излучатель - приемник излучения. При работе устройства сначала блок 18 определяет тип детали 33, а затем рука манипулятора поворачивает корпус 1 вокруг оси, пока необходимая вакуумная присоска 17 не установится напротив детали 33. 6 ил.
Изобретение относится к робототехнике и может быть использовано в гибких производственных системах.
Целью изобретения является расширение функциональных возможностей путем распознавания типа детали и выбора для нее соответствующего захватного элемента.
На фиг.1 показано устройство, осевое сечение; на фиг.2 - сечение А-А на фиг. 1 при распознавании детали; на фиг.З - сечение А-А на фиг.1 при захвате детали; на фиг.4-система управления; на фиг.5 - три типа захватываемых деталей; на фиг.6 - таблица переключений дешифратора.
Устройство содержит полый цилиндрический корпус 1, по периметру которого выполнены отверстия 2 и кольцевой паз 3, имеющий в сечении форму трапеции На корпусе 1 закреплена крышка 4, к которой крепится поворотная рука 5 манипулятора, снабженная приводом поворота вокруг своей оси. Для герметичности соединения между крышкой 4 и рукой 5 установлена прокладка 6. В корпусе 1 при помощи подшипников установлена насадка 7, на которой закреплен маятник, состоящий из основания 8 с установленными на нем коническим фиксатором 9 с каналом 10, пружиной 11 и резьбовой втулкой 12, регулирующей усилие пружины 11. В насадке 7 выполнены каналы 13, 14, которые через штуцер 15 и канал -16 соединяются с источником вакуума. Каждое отверстие 2 имеет выход в полость соответствующей вакуумной присоски 17. Вакуумные присоски 17 закреплены по периметру на внешней поверхности корпуса 1 и отличаются друг от друга формой и размерами, предназначенными для захвата деталей разных типов. Вместе с вакуумными присосками 17 на корпусе 1 закреплен блок 18 датчиков наличия детали, выполненных в виде пары излучатель 19 - приемник 20 излучения.
Система управления устройства содержит многоканальный,усилитель 21, регистр 22, дешифратор 23, элементы И 24, элемент ИЛИ 25, триггер 26, элемент И 27, счетчик 28, дешифратор 29, элемент ИЛИ 30, кнопку
31 сброса, генератор 32 тактовых импульсов. Выход элемента И 27 подключен к приводу поворота руки манипулятора 5
Захватываемая деталь 33 (фиг.5) предоставлена типами 34, 35, 36. Предполагается, что блок 18 содержит четыре датчика наличия детали На фиг 6 показана таблица переключений реализуемая дешифратором 23, где XL X2, Хз, Хз сигналы, поступающие
0 с датчиков блока 18, Yi, Ya, Уз - сигналы на выходе дешифратора
Устройство работает следующим образом.
Нажатием кнопки 31 сброса сбрасыва5 ётся триггер 26 Захват позиционируется над деталью 33, при этом рука манипулятора 5 повернута вместе с корпусом 1 в такое положение, что блок 18 датчиков наличия детали расположен напротив детали 33
0 Для ряда датчиков деталь 33 меняет направление отраженных лучей, идущих ог излучателя 19 к приемнику 20, что вызывает срабатывание соответствующих датчиков Сигналы усиливаются многоканальным уси5 лителем 21 На выходе элемента ИЛИ 30 появляется 1, поступающая на смнхров- ход регистра 22 и устанавливающая триггер 26 в единицу, В регистр 22 при этом заносится код ХчХ2ХзХ4, поступающий далее на
0 дешифратор 23. На выходе дешифратора 23 появляется код Yi, Y2, Уз. Триггер 26, установленный в единицу, через элемент И 27 включает привод поворота руки манипулятора 5. Тактовые импульсы от генератора 32
5 тактовых импульсов поступают как на упомянутый привод, так и на счетчик 28 Рука манипулятора 5 поворачивается вместе с корпусом 1, при этом положение насадки 7 коническим фиксатором 9 вниз остается не0 изменным. Корпус 1 поворачивается вокруг насадки 7, а конический фиксатор 9 скользит по кольцевому пазу 3. Один импульс соответствует повороту корпуса 1, переводящему на рабочую позицию
5 следующую из вакуумных присосок 17 Порядковый номер вакуумной присоски 17, находящейся в данный момент напротив детали 33, поступает со счетчика 28 на
дешифратор 29, где он преобразуется в код YiYaYs. На элементы И 24 с дешифратора 29 поступают сигналы, соответствующие текущему содержанию кода YiY2Y3, а с дешифратора 23 - сигналы, соответствующие коду Yi YaYs выбранного типа детали 33, т.е. соответствующей вакуумной присоски 17. Поскольку код Yi Y2Ys содержит только одну из Г, элемент ИЛИ 25 выдает 1 только при совпадении текущего и заданного кода. При появлении 1 на выходе элемента ИЛИ 25 триггер 26 обнуляется и на выходе элемента И 27 появляется О, который прекращает вращение руки манипулятора 5. После этого захват опускается на деталь 33, включается источник вакуума и деталь 33 присасывается к вакуумной присоске 17, которая соответствует ее типу. Для открепления детали достаточно отключить источник вакуума. Формула изобретения Многопозиционный вакуумный захват, содержащий полый цилиндрический корпус
с захватными элементами, закрепленный
на поворотной руке манипулятора, отличающийся тем, что, с целью расширения функциональных возможностей, в корпусе соосно с ним с возможностью вращения дополнительно установлена насадка с
маятником, содержащим основание с установленными на нем резьбовой втулкой и подпружиненным коническим фиксатором, имеющим возможность взаимодействия с ответным кольцевым пазом, выполненным на внутренней поверхности корпуса, при этом каждый захватный элемент выполнен в виде вакуумной присоски, полость которой через соответствующее отверстие в корпусе и каналы, выполненные в фиксаторе,.насадке
и руке манипулятора, имеет возможность соединения с источником вакуума, причем на корпусе дополнительно установлен блок датчиков наличия детали, каждый из которых выполнен в виде излучателя и приемника излучения.
ъ
,
ъ
фигА
36
.з
| Электромагнитный захват | 1987 |
|
SU1583288A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
