/////////////
Изобретение относится к машиностроению и может быть использовано в захватных органах манипуляторов.
Целью изобретения является повышение надежности в работе устройства за счет обеспечения точности позиционирования захватываемых изделий.
На фиг. 1 показано устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Вакуумное захватное устройство содер- жит корпус 1, на котором посредством гайки 2 закреплена втулка 3. Во втулке 3 соосно ей установлена с возможностью осевого перемещения трубка 4 с присоской. Трубка 4 выполнена с буртиком 5. а втулка 3-е бур- тиком 6.
Для исключения поворота трубки 4 относительно втулки 3, а следовательно, и корпуса 1 втулка 3 снабжена хвостовиком 7, а трубка 4 - хвостовиком 8. Хвостовики 7 и 8 выполнены в виде полуцилиндров, сопряженных друг с другом по плоским поверхностям 9 и 10. При продольном перемещении трубки 4 относительно втулки 3 поверхности 9 и 10 взаимодействуют друг с другом, исключая при этом поворот присоски на всей длине компенсационного хода h.
Трубка 4 подпружинена пружиной 11 относительно корпуса 1, полость которого связана с вакуумной системой посредством штуцера 12.
Устройство работает следующим образом.
При опускании корпуса 1 присоска касается захватываемого изделия 13. После этого включается вакуумная система, происходит захват изделия.Затем корпус 1 поднимается и по мере необходимости может производиться вертикальное перемещение, поворот относительно вертикальной оси и транспортные перемещения по взаимно перпендикулярным осям в горизонтальной плоскости. В процессе этих перемещений благодаря контакту хвостовиков 7 и 8 полностью исключен произвольный поворот присоски с изделием относительно корпуса 1, что исключает разориентацию изделия 13 и обеспечивает более точное его позиционирование в заданной точке координат.
Формула изобретения
Вакуумное захватное устройство, содержащее корпус, на котором соосно с ним закреплена втулка, а во втулке соосно с ней установлена с возможностью осевого пере-1 мещения трубка, подпружиненная относительно корпуса, при этом полость трубки связана с вакуумной системой, отличающееся тем, что, с целью повышения надежности в работе, трубка и втулка снабжены хвостовиками, выполненными в виде полуцилиндров, сопряженных друг с другом по плоским поверхностям.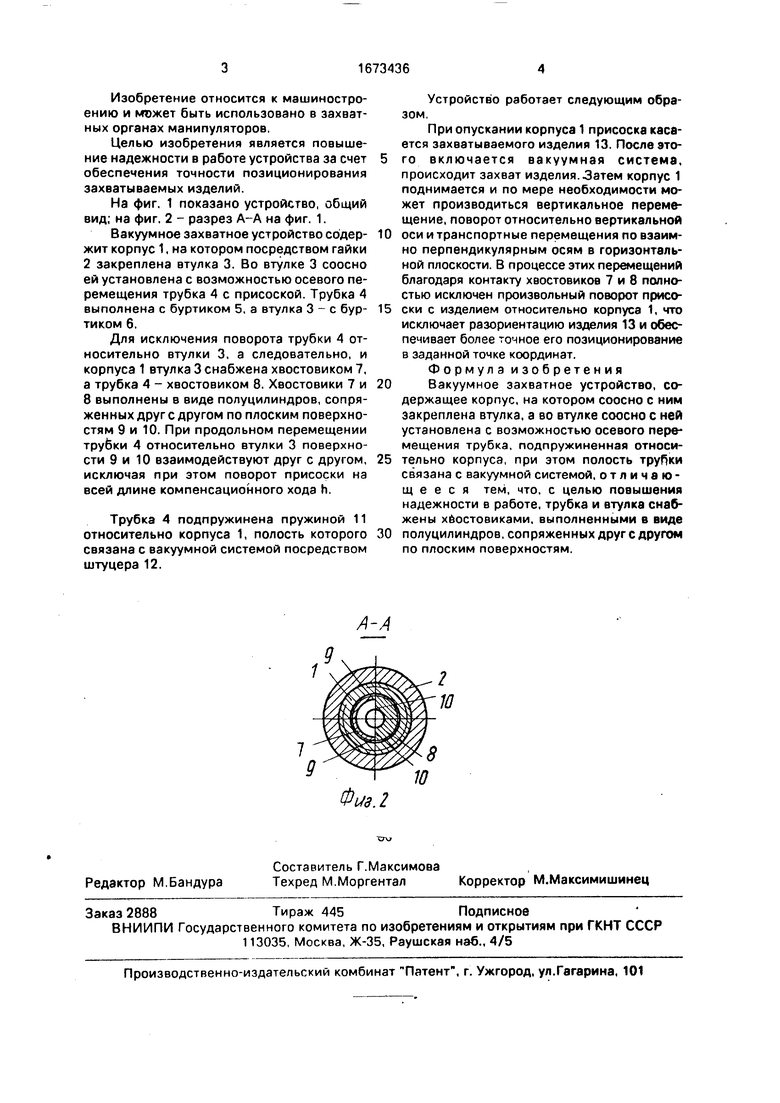
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное захватное устройство | 1987 |
|
SU1445957A1 |
| Магнитно-вакуумный захват | 1991 |
|
SU1811486A3 |
| Устройство для поштучного отделения плоских заготовок от стопы | 1988 |
|
SU1569062A1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| Пневматический захватный орган для плоских деталей | 1981 |
|
SU988423A1 |
| Захватный корректирующий модуль | 2015 |
|
RU2618019C1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| Устройство для переноса изделий на агрегате для изготовления грампластинок | 1978 |
|
SU787179A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2008 |
|
RU2370359C1 |
Изобретение относится к машиностроению и может быть использовано в захватных органах манипуляторов. Цель изобретения - повышение надежности работы устройства за счет обеспечения точности позиционирования захватываемых изделий. На корпусе 1 посредством гайки 2 закреплена втулка 3. Для исключения проворота трубки 4 относительно втулки последняя снабжена хвостовиком 7, а трубка 4 - хвостовиком 8. Хвостовики 7 и 8 выполнены в виде полуцилиндров, сопряженных друг с другом по плоским поверхностям. В процессе работы, после захвата изделия корпус 1 поднимается. По мере необходимости может производиться вертикальное перемещение, поворот относительно вертикальной оси и пр. Благодаря контакту хвостовиков 7 и 8 полностью исключен поворот присоски с изделием относительно корпуса 1, что исключает разориентацию изделия 13 и обеспечивает более точное позиционирование. 2 ил.
| Вакуумный схват | 1982 |
|
SU1038221A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
