14474
Изобретение относится к процессу обогащения, в .частности для автоматизации флотационным процессом,
Цель изобретения - повышение точности управления.
На чертеже представлена блок-схема системы управления процессом получения флотационного концентрата,
Система содержит датчики 1-3 соот- Q вётственно расхода, гранулометричес- кого состава) плотности, блок 4 первой производной гранулометрического состава по времени, блок 5 первой прозводной плотности во времени, первый 15 второй квадраторы 6 и 7, первый сумматор 8, блок 9 извлечения квадратного корня, второй сумматор 10, задат- чик 1 1, регулятор 12, задатчик 13 регулятора, блок 14 управления расходом 20 реагента вспенивателем, блок 15 управения расходом реагента ;собирателя 5 озаторы 16 и 17 реагента вспенивате- я и собирателя, фпотомашина }8,
Датчики 2 и 3 гранулометрического 25 состава и плотности подключены ко вхоам блоков 4 первой производной гранулометрического состава по времеьш и 5 первой производной плотности по времени J к выходам которых подключены зо первый 6 и второй 7 квадраторы, выхоы которого подключены к первому и второму входу первого сумматора 8, выходом подключенного ко входу блока 9 звлечения квадратного корня, который , подключен к первому входу второго сумматора 10, второй вход которого подключен к задатчику 11 временных интервалов, а выход соединен с первым входом регулятора 12, второй вход ко- д торого связан с задатчиком 13, выход регулятора связан со вxoдa и блоков 14 и 15 управления соответственно расходом вспенивателя и собирателя, выхо- ды которых.подключены к дозаторам 16 д и 17 реагента соответственно вспенивателя и собирателя, которые дозируют вспениватель и собиратель во фпотома- шину 18, Датчик J расхода подключен к третьему входу .сумматора 8,rg
Система работает следугадим образом, Основное функциональное назначение систеьы - сформировать сигнал
д.7 и Таи7)
О-Ь-лК г-/ 8
dt
dt
55
где dU,.- сигнал, пропорционапьный
гранулометрическому составу,
Q 1520 25зо ,ддrg
5
132
dU - сигнал, пропорциональный
плотности.
Величина сигнала db элементарного отрезка выбирается за временной интервал квантователя и она равна сумме элементарных приращений, формируемых в сумматоре Ю, В этом случае сигналы, пропорциональные гранулометрическому составу и плотности, поступают на входы блока 4 получения первой производной гранулометрического состава по времени и блока 5 получения первой производной плотности по времени, откуда сигналы, пропорциональ- первым производным гранулометрического состава и плотности, поступают на входы квадратора 6, возводяще-) го в квадрат электрический сигнал, пропорциональньш первой производной гранулометрического сост.ава по времени, и квадратора 7, формирующего сигнал, пропорциональный квадрату первой производной плотности по времени, В первом сумматоре 8 формируется электрический сигнал, пропорциональный . сумме сигналов, пропорциональных квадратам первой производной гранулометрического состава и плотности по времени и датчика расхода, сигнал с выхода этого сумматора 8 поступает на вход блока 9 извлечения квадратного корня, откуда поступает на сумматор 10, где накапливается за заданный задатчиком 11 временной интервал, после чего сравнивается в регуляторе 12 с заданной задатчиком 13 величиной dL, откуда сигналы поступают в блоки 14 и 15 управления расходом вспенивателя и собирателя,в зависимости от количества импульсов дозаторы 16 и 17 подают определенное количество вспенивателя и собирателя во флотомашину 18,
Формула изобретения
Система автоматического управления процессом получения флотационного концентрата, содержащая датчик гранулометрического состава расхода и плот- .„ности исходного питания, регулятор с задатчиком соответственно подключенный к входам блоков управления расходом реагентов собирателя и вспенивателя, подключенных к дозаторам реагентов собирателя и вспенивателя, отличаю щаясятем, что, с целью повьшения точности управления, она снабжена двумя блоками производ 1447413
ной гранулометрического состава исоответственно к пepвo y и второму
плотности, двумя квадраторами, первым входам первого сумматора, а к третье- и вторым сумматорами, блоком извлече- му его входу подключен датчик расхо- ния квадратного корня и вторым задат- да исходного питания, причем выход чнком, соединенным с первым входомпервого сумматора через блок извлечевторого сумматора, при этом блоки про- ния квадратного корня соединен с вто- изводной гранулометрического составарым входом второго сумматора, выход
и плотности соединены с входами квад- которого подключен к второму входу раторов, выходы которых подключены ю регулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления процессом получения флотационного концентрата во флотомашине | 1987 |
|
SU1447411A1 |
| Устройство для автоматического управления процессом флотации | 1989 |
|
SU1740074A1 |
| Способ автоматического управления процессом флотации | 1982 |
|
SU1066654A1 |
| Система управления пресс-гранулятором | 1985 |
|
SU1301726A1 |
| Система автоматической стабилизации плотности пульпы в слив классификатора при мокром процессе измельчения | 1982 |
|
SU1065021A1 |
| Устройство для стабилизации электричес-КОгО РЕжиМА дугОВОй элЕКТРОпЕчи ВАХМиНшлАК | 1979 |
|
SU849561A1 |
| Устройство автоматического управления пространственным положением быстровращающегося ротора | 1990 |
|
SU1739100A1 |
| Система автоматического регулирования загрузки барабанной мельницы | 1987 |
|
SU1435296A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| Способ управления процессом флотации | 1985 |
|
SU1266563A1 |
Изобретение относится к автоматизации процессов обогащения и может быть использовано для управления процессом флотации. Цель изобретения - повышение точности управления. Система содержит датчики 1,2,3 соответственно расхода, гранулометрического состава (ГС), плотности, блок 4 первой производной ГС по времени, блок 5 первой производной плотности во времени, первый 6 и второй 7 квадраторы, первый сумматор 8, блок 9 извлечения квадратного корня, второй сумматор 10, регулятор 12, блоки 14 и 15 управления расходом реагентов вспенивателя и собирателя, дозаторы 16 и 17 указанных реагентов. Сигналы, пропорциональные ГС и плотности, поступают на вход блоков 4 и 5, откуда сигналы, пропорциональные первым производным ГС и плотности, поступают на вход квадраторов 6, 7. Квадраты указанных сигналов поступают в сумматор 8, где суммируются с сигналом датчика расхода 1 и через блок 9 поступают на второй сумматор 10, где накапливаются за заданный задатчиком 11 временной интервал. Суммарный сигнал сравнивается в регуляторе 12 с заданной задатчиком 13 величиной. Регулятор 12 формирует управляющие сигналы, поступающие в блоки 14 и 15 управления расходом вспенивателя и собирателя и дозаторы 16 и 17. 1 ил. Sfi (Л с 4 Ч 4; оо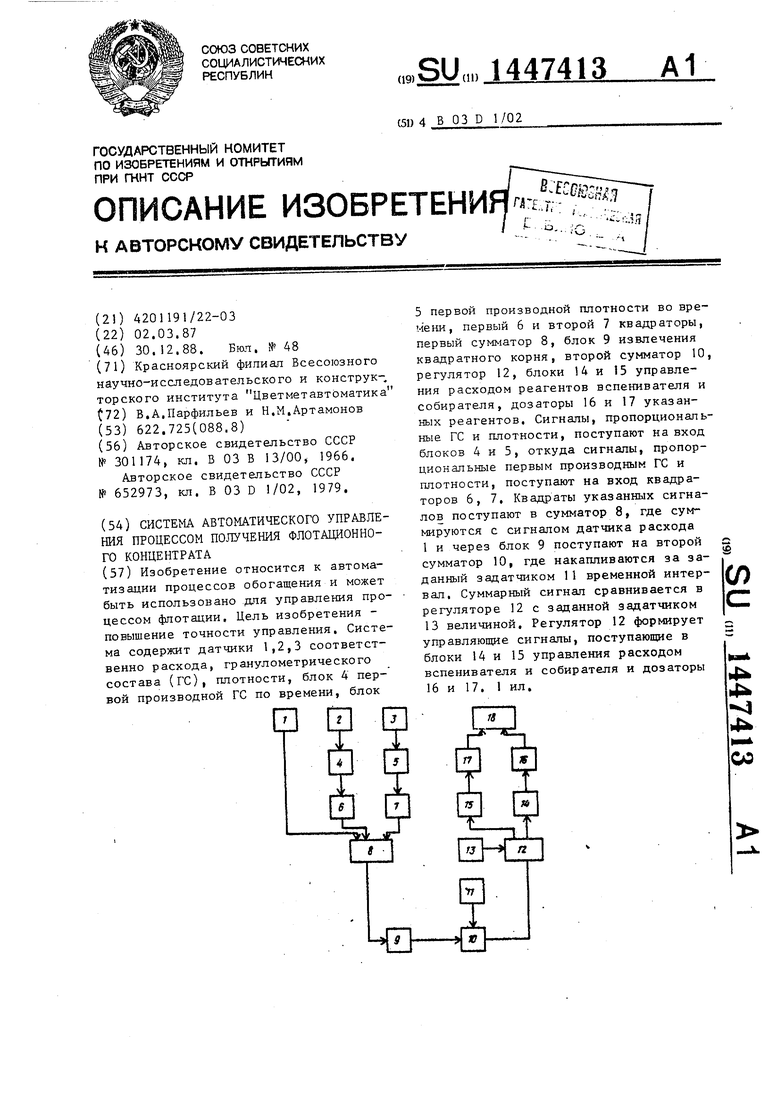
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ЦЕНТРИФУГ | 0 |
|
SU301174A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Авторское свидетельство СССР № 652973, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
