ел
00 СП
Изобретение относится к электротехнике и может быть использовано для привода транспортных средств в горнодобьшающей промышленности.
Цель изобретения - расширение эксплуатационных возможностей путем регулирования и стабилизации скорости якоря.
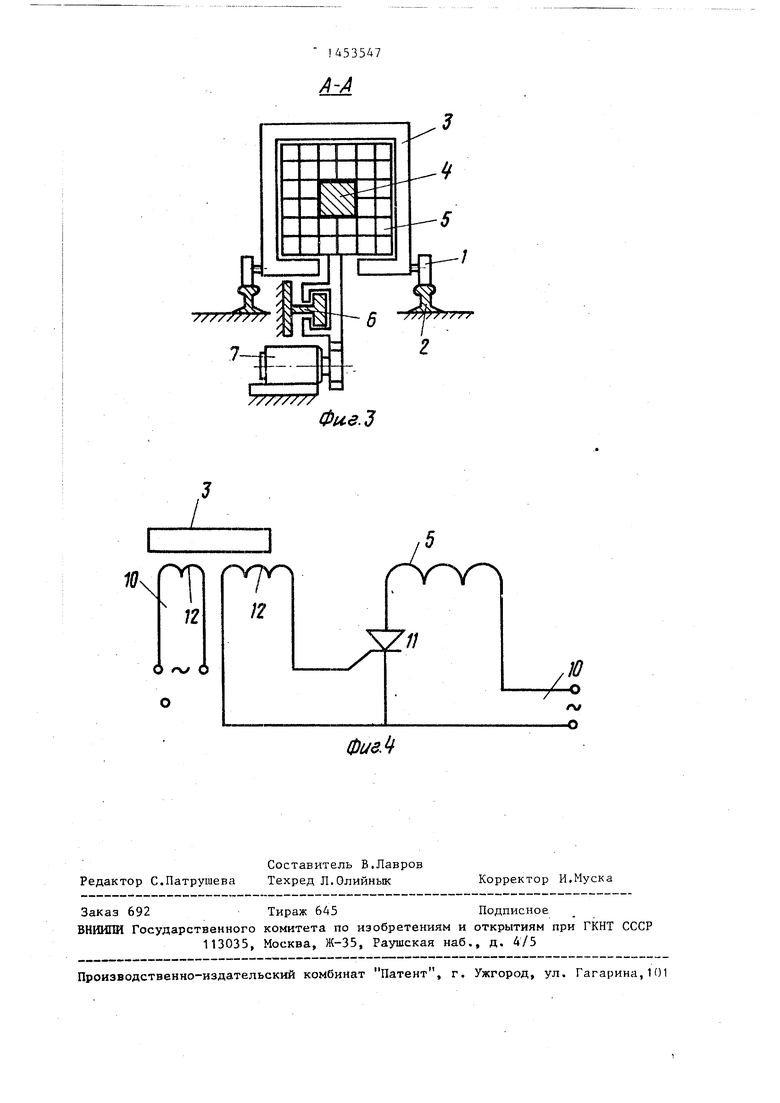
На фиг. 1 изображено устройство с сомкнутыми секциями индуктора, про дольный разрез; на фиг. 2 - то же„ с разомкнутыми секциями индуктора} на фиг о 3 - разрез А-А на фиг. 2; на фиг. 4 - схема коммутации индуктора.
Устройство имеет перемещающийся при помощи катков 1 по направляющим 2 якорь 3, внутри которого размещен индуктор, выполненный из секций 4 с обмотками 5. Секции 4 индуктора уста- новлены на монорельсе 6 с возможностью перемещения одна относительно другой При помощи исполнительного электродвигателя 7, на валу которого установлено зубчатое колесо 8, входя щее в зацепление с зубчатой рейкой 9 Система управления содержит источник 10 переменного тока, тиристор 11, датчик 12 положения якоря, датчик 13 скорости и компаратор 14„ Одна из секций 4 жестко соединена с зубчатой рейкой 9. Обмотки 5 соединены последовательно и через тиристор 11 подключены к источнику 10 переменного тока. Выход датчика 12 подключен к управляющему электроду тиристора 1, а выход датчика 13 скорости подключен к входу компаратора 4, к выходу которого-подключены обмотки управления исполнительного электродвигате- ля 7.
Линейный злектропривод работает следующим образом.
Якорь 3 перемещается по направляющим 2 с заданной скоростью U и пересекает датчик 12 положения. На выходе датчика I2 появляется напряжение, достаточное для отпирания тиристора 11. Через тиристор 11 в обмотки 5 индуктора поступает ток и вокруг индуктора создается магнитное поле. Зона злектромагнитного воздействия на якорь 3, образованная при этом, и тяговое усилие достаточны для совершения работы по приданию якорю 3 заданной скорости U, . Значения скорости дв1-1жения якоря U и Ugj,, соответствуют скорости входа его в зону электромагнитного воздействия индуктора и выхода из него. В своем дальнейшем движении якорь 3 уходит от датчика 12 положения, тиристор 11 запирается и якорь 3, пОг лучив запас кинетической энергии, движется дальше по направляющим 2.
В случае, когда на якорь 3, перемещающийся по Ка правляющим 2, оказана дополнительная сила сопротивления его движению, например увеличивается сила трения катков 1 о направляющую 2, якорь 3 имеет скорость Ug, , отличную от заданной. Значение этой скорости определяет датчик 13 скорости при прохождении мимо него якоря 3. Сигнал от датчика 13 скорости поступает в кампаратор 14, где происходит сравнение скорости. Так как скорость меньше заданной, следовательно, скорость выхода якоря из зоны электромагнитного воздействия меньше заданной Ug, , то компаратор 14 выдает команду на управление исполнительным электродвигателем 7,. Исполнительный электродвигатель раздвигает секции 4 индуктора одну относительно другой на расстояние, соответствующее отношению ,/tpUg j т.е. увеличивает длину индуктора так, чтобы время работы индуктора tp увеличилось во столько раз, во сколько надо увеличить скорость якоря Ugx до заданной скорости U . В дальнейшем своем движении по направляющим 2 якорь 3 пересекает датчик 12 положения., На тиристор 11 подается сигнал .на отпирание и в обмотки 5 поступает ток. Вокруг индуктора с обмотками 5 образуется магнитное поле. Зона электромагнитного воздействия у индуктора с раздвинутыми секциями 4 определяется длиной.1„„ (фиг. 2) и больше, чем при сомкнутых секциях 4 индуктора. Следовательно, на якорь за время движения вдоль разомкнутых секций 4 действует больший импульс силы, который придает якорю дополнительную скорость, и при выходе из зоны электромагнитного воздействия лндуктора скорость якоря равняется заданной . Якорь 3, получив запас кинетической энергии, уходит от датчика 12 положения. Тиристор 11 запирается и якорь 3 по инерции продолжает свое движение по направляющим 2. Поскольку якорь имеет теперь заданную скорость Ugbix, то это приводит к ста- - билизации скорости. При этом для увеличения скорости движения якоря в обмотках 5 индуктора не повьппается напряжение и значение тока в обмотках не меняется и, следовательно, обмотки 5 индуктора не подвергаются температурному перенапряжению.
Кроме этого, раздвижение секций А индуктора приводит к тому, что увеличивается площадь теплообмена и улучшается температурный режим обмоток .
Формула изобретения
Линейный электропривод, содержащий линейный асинхронный двигатель с индуктором, имеющим однофазную обмотку, охватывающий индуктор якорь С-образной формы, установленный на направляющих с возможностью продольного перемещения, и систему управления, содержащую источник переменного тока, о т л и - чающийся тем, что, с целью расширения эксплуатационных возможностей путем регулирования и стабилизации скорости якоря, электропривод снабжен исполнительным электродвигателем с установленным на его валу зубчатым колесом, входящим в зацепление с зубчатой рейкой, параллельной -направляющим, а система уп- 0 равления снабжена тиристором, датчиком скорости якоря, датчиком положения якоря и компаратором, индуктор выполнен из отдельных секций, установленных с возможностью перемещения 5 секций одна относительно другой, одна из секций жестко соединена с зубчатой рейкой, обмотки секций соединены последовательно и через тиристор подключены к источнику перемен- 0 ного тока, выход датчика положения якоря подключен к управляющему электроду тиристора, а выход датчика скорости якоря подключен ко входу компаратора, к выходу которого под- 5 ключены обмотки управления исполнительного электродвигателя.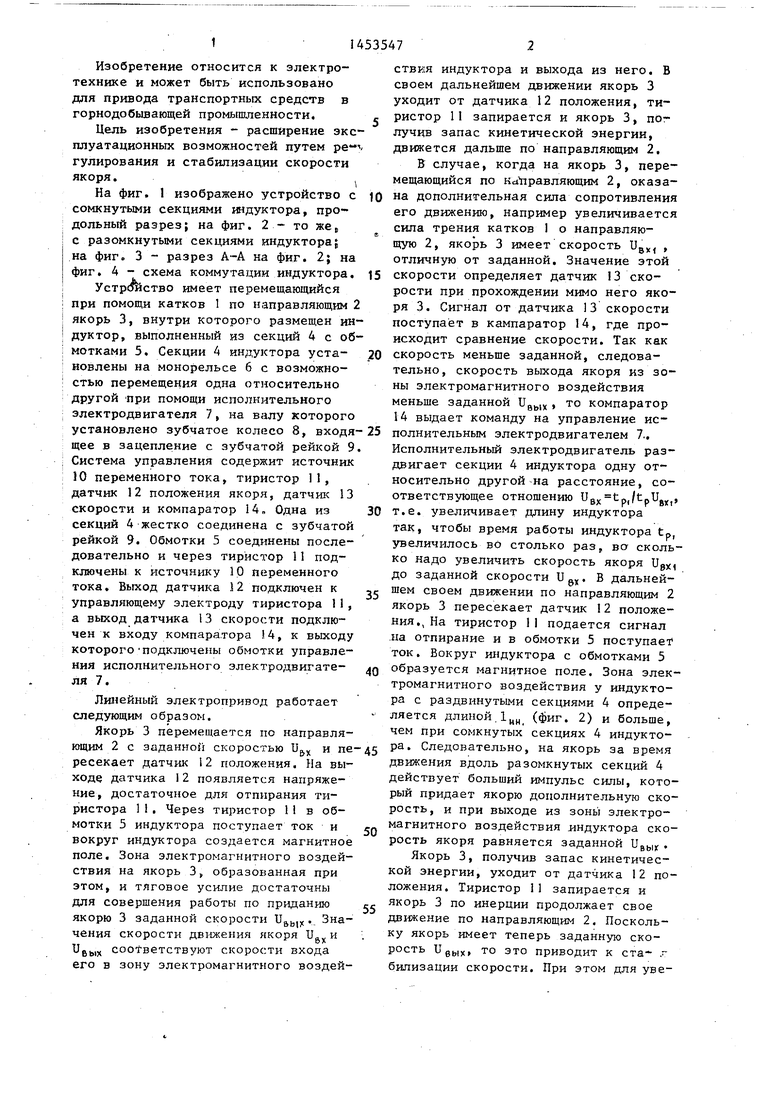

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| СТЕНД ДЛЯ ПРИРАБОТКИ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2027982C1 |
| Следящая система | 1987 |
|
SU1631513A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006145C1 |
| Вентильный электродвигатель | 1977 |
|
SU702467A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И НАСТРОЙКИ ПАРАМЕТРОВ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМИ МАГНИТАМИ | 1992 |
|
RU2013854C1 |
| Линейный электродвигатель | 1977 |
|
SU736286A1 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088041C1 |
| Система управления положением объекта | 1989 |
|
SU1620996A2 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
Изобретение относится к-электротехнике и может быть использовано для привода транспортных средств в горнодобывающей промышленности.. Целью изобретения является расширение эксплуатационных возможностей путем регулирования и стабилизации скорости якоря. Устройство содержит установленный с возможностью линейного перемещения якорь 3 линейного асинхронного двигателя, внутри которого размещены секции 4 индуктора с обмотками 5. Секции 4 установлены с возможностью линейного перемещения одна относительно другой при помощи исполнительного электродвигателя 7. Система управления посредством тиристора, включенного последовательно с обмотками 5, датчика положения якоря 12, датчика скорости 13 и компаратора 14 регулирует и стабилизирует скорость якоря 3 посредством автоматического раздвижения секции 4 индуктора, действуя на исполнительный двигатель.,7 . 4 ил. (П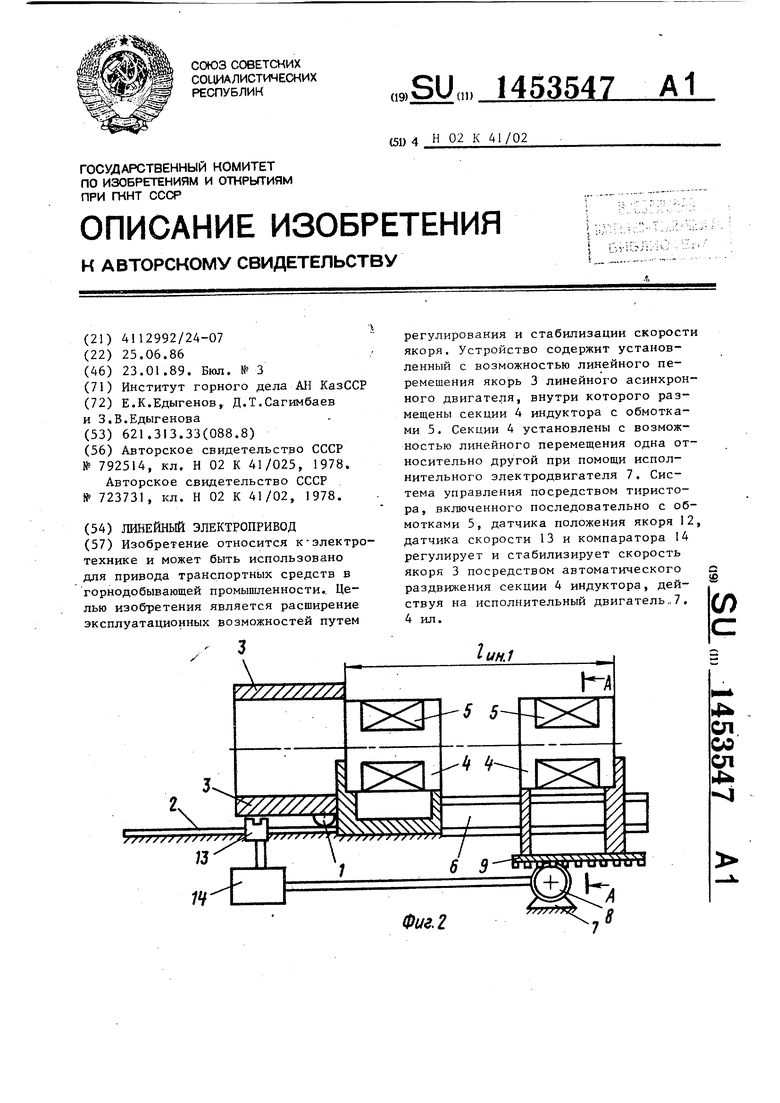
| Асинхронный линейный электродвигатель | 1978 |
|
SU792514A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный электропривод | 1978 |
|
SU723731A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
