4ik
СО ел
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления передвижным конвейером для загрузки вагонов сыпучим грузом | 1983 |
|
SU1134511A1 |
| Весодозировочное устройство для роторных экскаваторов | 1991 |
|
SU1816969A1 |
| Устройство для весового дозирования сыпучих материалов | 1982 |
|
SU1076766A1 |
| Устройство автоматического управления установкой для загрузки вагонов дозированными порциями сыпучего груза | 1980 |
|
SU889580A1 |
| Устройство для послойной загрузки сыпучих материалов в емкость | 1979 |
|
SU870315A1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1987 |
|
SU1422017A1 |
| Электромагнитный вибропривод транспортирующего устройства | 1983 |
|
SU1148821A1 |
| Устройство автоматического управленияуСТАНОВКОй для зАгРузКи ВАгОНОВдОзиРОВАННыМи пОРцияМи СыпучЕгОгРузА | 1979 |
|
SU814835A1 |
| Система автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1491579A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |

Изобретение относится к погрузочным устройствам для автоматичесг кого управления передвижным конвей ером при загрузке транспортных средств сьтучим грузом и позволяет повысить эффективность путем улучшения использования объема вагона. Устройство включает датчик 1 массы, подключенный к функциональному преобразователю 2.скорости, которьй соединен с блоком 3 коррекции и блоком 4 задержки. Задатчик 5 типа вагона и конвейера соединен с блоком 3 коррекции и функциональным преобразователем 2 скорости. Датчик 6 плотности, установленный на конвейере, соединен с блоком 3 коррекции. Блок 8 сравнения соединен с блоком задержки, а также с блоком управления и датчиком скорости, которьй соединен с приводом передвижения конвейера. В устройство введен блок 12 коррекции электромеханической постоянной времени, осуществляющий полное автоматическое управление передвижным конвейером, при котором обеспечивается полное соответствие задаваемой скорости требуемому значению и улучшается использование объема кузова. 2 з.п. ф-лы, 3 ил. (Л
.1
Изобретение относится к погрузочным устройствам для автоматического управления передвижным конвейером при загрузке транспортных средств сыпучим материалом.
Цель изобретения - повышение эффективности путем улучшения исполь- зпвания объема вагона.
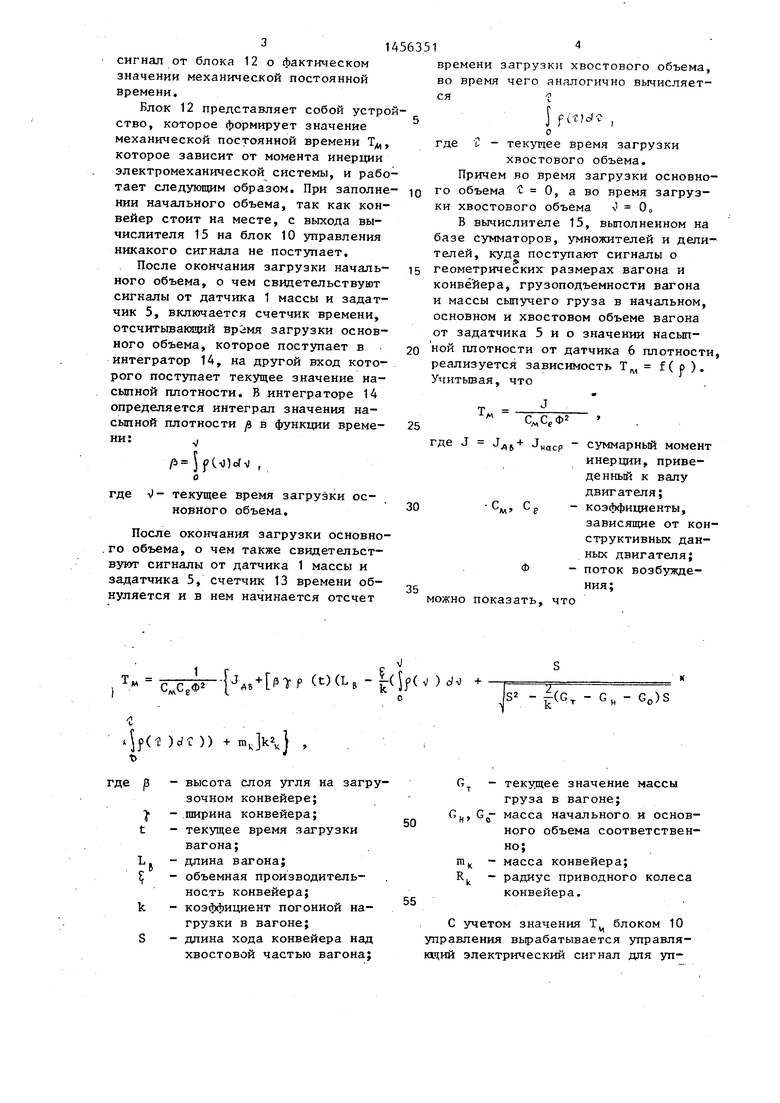
На фиг. 1 изображена функциональ- ная схема устройства; на фиг, 2 - блок коррекции электромеханической постоянной времени на фиг, 3 - блок управления.
Устройство автоматического управ- ления передвижным конвейером содержит датчик 1 массы, выходом подклю- ченньй к первому входу функционального преобразователя 2- скорости, второй вход которого соединен с вы- ходом блока 3 коррекции, а выход - с входом блока 4 задержки. Задатчик с блоками задания типа вагона и конвейера соединен с первым входом блока 3 коррекции и с третьим входом функционального преобразователя 2 скоростио Датчик 6 плотности груза, установленный на конвейере 7, соединен с вторым входом блока 3 коррекции. Первый и второй входы блока 8 сравнения соединены с выходами блока 4 задержки и датчика 9. скорости перемещения конвейера, а выход блока 8 сравнения связан с первым входом блока 10 управления, выход кото рого соединен с приводом 11 передвижения конвейера.
Кроме того, устройство содержит блок 12 коррекции электромеханичесО при
V
р, при с, GC,;
где V - скорость движения загрузочного конвейера. Поскольку
V - dt
где OJ - угловая скорость вращения
двигателя,
то при изменении J. , про- порциональном изменению Т, скорост
кой постоянной времени, первый вход которого подключен к датчику 1 массы, второй вход - к датчику плотности груза, а третий вход - к задатчи- ку 5, причем выход блока 12 подключе к второму входу блока 10 управления. Блок 12 содержит счетчик 13 времени, интегратор 14 и вычислитель 15, При этом первые, вторые и третьи входы последнего являются соответственно первыми, вторым и третьими входами этого блока, а выход является выходом этого блокао Первый вход интегратора является вторым входом блока, а второй вход связан с выходом счетчика времени, первый и второй входы которого являются соответственно первым и третьим входами этого бло- као
Блок 10 управления содержит соединенные в последовательную цепь про- порционально-ина-егральньм регулятор 16, регулятор 17 и тиристорный преобразователь 18, причем выход последнего является выходом этого блока, а вход пропорционально-интегрального регулятора 16 является первым входом этого блока, вторым входом которого является второй вход регулятора 17.
Устройство работает следующим образом.
От датчика 1 массы, датчика 6 плоности через блок 3 коррекции, задат- чика 5 сигналы поступают на функциональный преобразователь 2., где формируются законы управления передвижным конвейером 7 согласно выражению
при + GO,
50
перемещения конвейера V отличается от заданной.
Заданный сигнал скорости с функционального преобразователя 2 через ее блок 4 задержки поступает в блок 8 сравнения, где сравнивается с действительной скоростью конвейера 7. Сигнал разности поступает на блок lOi управления, куда также поступает
сигнал от блока 12 о фактическом значении механической постоянной времени.
Блок 12 представляет собой устрство, которое формирует значение механической постоянной времени Т которое зависит от момента инерции электромеханической системы, и работает следующим образом. При заполнении начального объема, так как конвейер стоит на месте, с выхода вычислителя 15 на блок 10 управления никакого сигнала не поступает,
После окончания загрузки начального объема, о чем свидетельствуют сигналы от датчика 1 массы и задат- чик 5, включается счетчик времени, отсчитывающий загрузки основного объема, которое постзшает в . интегратор 14, на другой вход которого поступает текущее значение насыпной плотности, В интеграторе 14 определяется интеграл значения насыпной плотности /3 в функции времени:
ifC))o(
где
V- текущее время загрузки основного объема.
После окончания загрузки основного объема, о чем также свидетельствуют сигналы от датчика 1 массы и задатчика 5, счетчик 13 времени обнуляется и в нем начинается отсчет
Т м
СмСе
г- - мЧР1я (t)(L,-i(S|(v)c;)
V
Sf(i; )с/с)) + ,
1- де j3 - высота слоя угля на загрузочном конвейере; ширина конвейера; текущее время загрузки вагона; длина вагона; объемная производительность конвейера; коэффициент погонной нагрузки в вагоне; дпина хода конвейера над хвостовой частью вагона;
t
L
k S
Ь
времени загрузки хвостового объема, во время чего аналогично вычисляется
I , о
где D - текущее время загрузки хвостового объема.
Причем во время загрузки основного объема , а во время загрузки хвостового объема
В вычислителе 15, выполненном на базе сумматоров, умножителей и делителей, куда поступают сигналы о геометрических размерах вагона и конвейера, грузоподъемности вагона и массы сыпучего груза в начальном, основном и хвостовом объеме вагона от задатчика 5 и о значении насыпной плотности от датчика 6 плотности, реализуется зависимость Т, f( Р ). Учитьшая, что
25
Т„
Сл,с,Ф2
суммарный момент
инерции, приве- денньй к валу двигателя; е коэффициенты,
зависящие от конструктивных данных двигателя; Ф - поток возбужде- ния;
ожно показать, что
JS - j(G - G, - GO)S
(т - текущее значение массы
груза в вагоне;
G, G- масса начального и основного объема соответственно;
га - масса конвейера;
R - радиус приводного колеса конвейера.
С учетом значения Т., блоком 10
управления вырабатывается управля- юций электрический сигнал для управления приводом конвейера„
11 передвижения
Формула изобретения
63516
тий-.вход - с задатчиком, который /включает в себя блоки задания типа . вагона и конвейера, при этом выход блока коррекции подключен к второму входу блока управления.
2, Устройство по п. 1, отличающееся тем, что блок кор- рек1Д1и электромеханической постоянной времени содержит счетчик времени, интегратор и вычислитель, при этом первые, вторые и третьей входы последнего являются одноименными входами этого блока, а выход является выходом блока, причем первьй вход интегратора является вторым входом блока, а второй вход связан с выходом счетчика времени, первый и второй входы которого являются соответственно первым и третьим входами этого блока.
равления содержит соединенные в последовательную цепь пропорциональ- но-интегральный регулятор, регулятор и тиристорньй преобразователь, причем выход последнего является
выходом блока управления, а вход пропорционально-интегрального регулятора является первым входом этого блока, вторым входом которого является второй вход регулятора.
Фие. 2
Фие.5
| Устройство автоматического управления передвижным конвейером для загрузки вагонов сыпучим грузом | 1983 |
|
SU1134511A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
