Способы преобразования координат известны.
Предлагаемый способ преобразования координат отличается от известных тем, что для повышения точности выработки угловых параметров масштабы входных сигналов непрерывно корректируют в функции от сигналов, пропорциональных дальности.
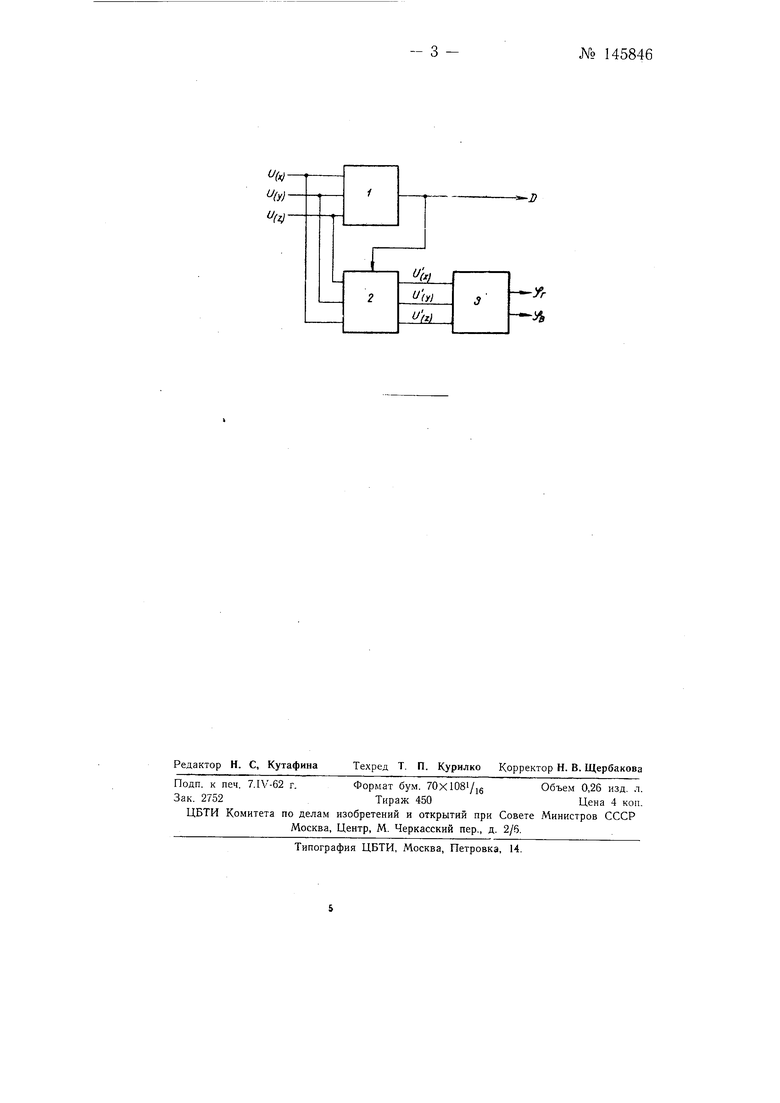
На чертеже показана функциональная схема устройства, преобразующего прямоугольные координаты точки (х, у, z) в сфорические (полярные) координаты (D, , в ) с использованием описываемого способа) .
Входные сигналы U(x)M.x.; U(y)M.y- U(z)M.z, пропорциональные исходным координатам х, у -к z (М - масштаб имитации величин координат) подаются на входы блока 1 вычисления дальности и блока 2 корректировки масштабов в функции дальности.
В блоке J производится вычисление дальности D решением уравнения D yx - y - z . Полученный сигнал, имитирующий величину вычисленной дальности, вводится в блок 2, где используется для корректировки масштабов подаваемых на этот же блок сигналов U(x) и (у) и U(z).
На выходе блока 2 в результате такой корректировки масштабов образуются сигналы U(x); U(y) и U(z) равные U(x) U(x) . f(D)(y) U(y).f(D); U(z) U(z)f(D), где /fDJ - выбранная для корректировки функция дальности.
Прокорректированные входные сигналы подаются в блок 3 вычисления угловых координат, который производит их пересчет в угловые
координаты ф.: f согласно уравнениям ф, агс tg агс sin - В случае преобразования прямоугольных координат в номерные в
№ 145846 ,- 2 -
задачу преобразования входит определение дальности D как одной из выходных координат. Поэтому, вычисленная блоком 7 дальность подается на выход схемы преобразования вместе с угловыми координатами р/. и (рв с выхода блока 3.
Подбором f(D) можно добиться желаемого закона изменения сигналов U(x); Uiy); ij(z) по мере изменения дальности.
Способ преобразования координат с корректировкой масштабов по дальности может использоваться также и при преобразовании координат из одной прямоугольной системы в другую прямоугольную. При этом вычислительные элементы, необходимые для определения дальности, являются дополнительным оборудованием, выполняющим только задачи корректировки масштабов в целях повышения точности преобразования. В случае необходимости получать выходные координаты в фиксированном масштабе на выходе схемы могут устань вливаться блоки, производяш.ие умножение на корректировочную функцию
--с целью возвраш.ения к фиксированному масштабу, от которого
в процессе преобразования координат ранее было допушено отклонение, связанное с умножением на f(D).
Однако имеется ряд задач, в которых производится преобразование координат из одной прямоугольной системы в другую прямоугольную (например, из неподвижной в подвижную), а затем полученные координаты из новой прямоугольной пересчитываются в полярную систему координат. В этом случае необходимая для последнего этапа преобразования координата дальности может быть получена сразу на первом этапе преобразования и использована для корректировки масштабов в схеме, производящей первое преобразование координат.
Таким образом, предлагаемый способ позволяет повысить точность выработки угловых параметров, что обусловливает полезность его применения на практике.
Предмет изобретения
Способ преобразования координат, отличающийся тем, что, с целью повышения точности выработки угловых параметров, масштабы входных сигналов непрерывно корректируют в функции от сигналов, пропорциональных дальности.
D
| название | год | авторы | номер документа |
|---|---|---|---|
| Система имитации движений летательного аппарата | 1960 |
|
SU136632A1 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2013 |
|
RU2537124C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251712C1 |
| Преобразователь координат 4-х мерного пространства | 1973 |
|
SU477427A1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |