Изобретение относится к авиационной технике, в частности к способам и конструкции устройств для многократной воздушной пересцепки буксируемого тела с одного летательного аппарата на другой, например, с самолета на вертолет, с вертолета на вертолет и т. д., и может быть использовано в гражданской авиации для перевозок буксируемых тел и грузов, их подъема и посадки в труднодоступных местах и т. п.
Известен способ аэропересцепки буксируемого тела с одного летательного аппарата на другой, заключающийся в перемещении буксируемого тела на гибкой связи основным летательным аппаратом с его захватным приспособлением и стабилизации положения буксируемого тела с помощью автопилота, синхронном с ним перемещении дополнительного летате льно- го аппарата с его захватным приспособлением, подводе захватного приспособления дополнительного летательного аппарата к буксируемому телу в направлении, перпендикулярном направлению полёта , захвате буксируемого тела захватным приспособлением дополнительного летательного аппарата, отсоединении буксируемого тела от гибкой связи основного летательного аппарата, подтягивании буксируемого тела к дополнительному летательному аппарату, недостатками которого являются низкие эксплуатационные характеристики из-за узкого диапазона скоростей, в котбром может быть осуществлена пересцепка, и низкие безопасность и удобство пользования из-за трудностей, возникающих при подводе захватного приспособления дополнительного летательного a rftfap a ta в направлении, перпендикулярном направлению перемещения буксируемого тела.
Наиболее близким по технической сущности предлагаемому является способ аэропересцепки буксируемого тела с одного летательного аппарата на другой, заключающийся в перемещении буксируемого тела на гибкой связи основным летательным аппаратом с его захватным приспособлением, синхронном с ним перемещении дополнительного летательного аппарата с его захватным приспособлением, подводе захватного приспособления дополнительного летательного аппарата к буксируемому телу, захвате буксируемого тела захватным приспособлением дополнительного лета- тельного аппарата, отсоединении буксируемого тела от гибкой связи основного летательного аппарата.
Данный способ, хотя и позволяет расширить эксплуатационные характеристики за счет увеличения диапазона скоростей, в
котором возможно осуществление пересцепки в воздухе, но также как и аналог, имеет низкие безопасность и удобство пользования, обусловленные тем, что после
пересцепки буксируемого тела с одного летательного аппарата на другой невозможна обратная пересцепка из-за направления перемещения захватного приспособления дополнительного летательного аппарата на0 встречу перемещению буксируемого тела, а также из-за того, что после захвата средства пересцепки захватным приспособлением дополнительного летательного аппарата возможно соприкосновение и поломка за5 хватных приспособлений и, кроме того летательные аппараты будут располагаться друг под другом с возможностью соприкосновения хвостового оперения дополнительного летательного аппарата с гибкой связью ос0 новного летательного аппарата.
Целью изобретения является повышение безопасности и удобства пользования процессом аэропересцепки.
Поставленная цель достигается тем, что
5 в способе аэропересцепки буксируемого тела с одного летательного аппарата на другой, заключающемся в перемещении буксируемого тела на гибкой связи основным летательным аппаратом с его захват0 ным приспособлением, синхронном с ним перемещении дополнительного летательного аппарата с его захватным приспособлением на дополнительной гибкой связи, перемещении захватного приспособления
5 дополнительного летательного аппарата к буксируемому телу, захвате буксируемого тела захватным приспособлением дополнительного летательного аппарата, отсоединении буксируемого тела от гибкой связи
0 основного летательного аппарата, согласно изобретения, перемещение захватного приспособления дополнительного летательного аппарата к буксируемому телу осуществляют в направлении перемещения
5 буксируемого тела.
Известно устройство для пересцепки буксируемого тела с одного летательного аппарата на другой, содержащее захватное приспособление основного летательного
0 аппарата, соединенное с ним гибкой связью, узел пересцепки, связанный с буксируемым телом, выполненным в виде крыла с дополнительными крылышками, и на котором расположена система вооружения
5 и автопилот, захватное приспособление дополнительного летательного аппарата, размещенное на нем, механизм подвода захватного приспособления дополнительного летательного аппарата к узлу пересцепки, механизм подтягивания
буксируемого тела к дополнительному летательному аппарату, недостатками которого являются низкие эксплуатационные характеристики из-за невозможности обеспечения аэропересцепки на вертолетных скоростях (от 180 км/ч и выше) вследствие незначительной подъемной силы у буксируемого тела и при выполнении его не в виде крыла, а также низкие безопасность и удобство пользования, обусловленные трудностями при повторной пересцепки с одного летательного аппарата на другой.
Наиболее близким по технической сущности предлагаемому является устройство для аэропересцепки буксируемого тела с одного летательного аппарата на другой, содержащее захватное приспособление основного летательного аппарата, соединенное с ним гибкой связью, связанный с буксируемым телом узел пересцепки, выполненный в виде кольца с перемычкой и его стабилизатором по направлению потока, захватное приспособление дополнительного летательного аппарата соединенное с ним дополнительной гибкой связью, и связанный с захватным приспособлением механизм подвода захватного приспособления к узлу пересцепки.
Данное устройство, хотя и позволяет расширить эксплуатационные характеристики за счет увеличения диапазона скоростей, в котором возможно осуществление пересцепки в воздухе, но также как и аналог, имеет низкие безопасность и удобство пользования, обусловленные тем, что после одной пересцепки с одного летательного аппарата на другой затруднена повторная пересцепка из-за небезопасного расположения летательных аппаратов друг относительно друга в процессе пересцепки и возможности соприкосновения и поломки захватных приспособлений летательного аппарата и дополнительного летательного аппарата, а также гибкой связи основного летательного аппарата с хвостовым оперением дополнительного летательного аппарата. А это приводит к необходимости сброса буксируемого тела, например, с самолета, и необходимости наличия дополнительных спасательных средств для его сохранения. Значительно ухудшается и удобство пользования за счет сужения области свободного пространства для размещения дополнительного летательного аппарата и свободного перемещения его захватного приспособления.
Целью изобретения являются повышение безопасности и удобства пользования процессом азропересцепки.
Поставленная цель достигается тем, что в устройстве для аэропересцепки буксируемого тела с одного летательного аппарата на другой, содержащем захватное приспо- 5 собление основного летательного аппарата, соединенное с ним гибкой связью, связанный с буксируемым телом узел пересцепки, выполненный в виде кольца с перемычкой и его стабилизатором по направлению лото0 ка, захватное приспособление дополнительного летательного аппарата, соединенное с ним дополнительной гибкой связью, и связанный с захватным приспособлением механизм подвода захватного
5 приспособления к узлу пересцепки, согласно изобретения, механизм подвода захватного приспособления к узлу пересцепки выполнен в виде движителя, установленного на захватном приспособлении дополни0 тельного летательного аппарата.
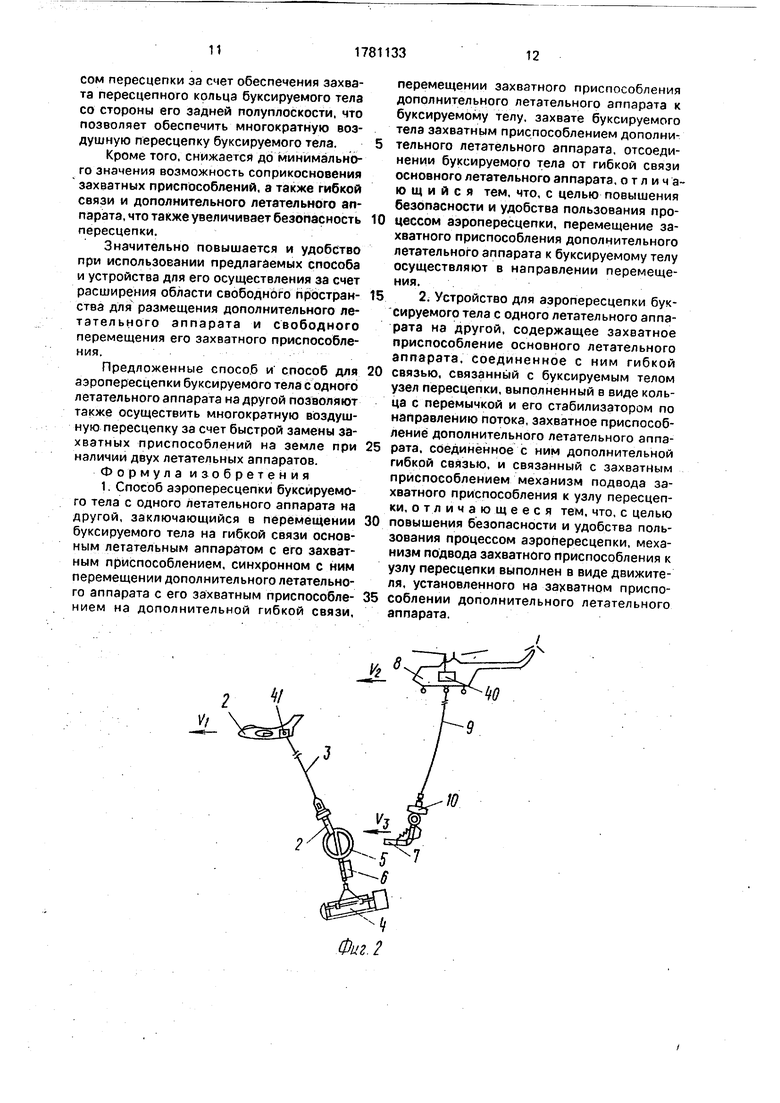
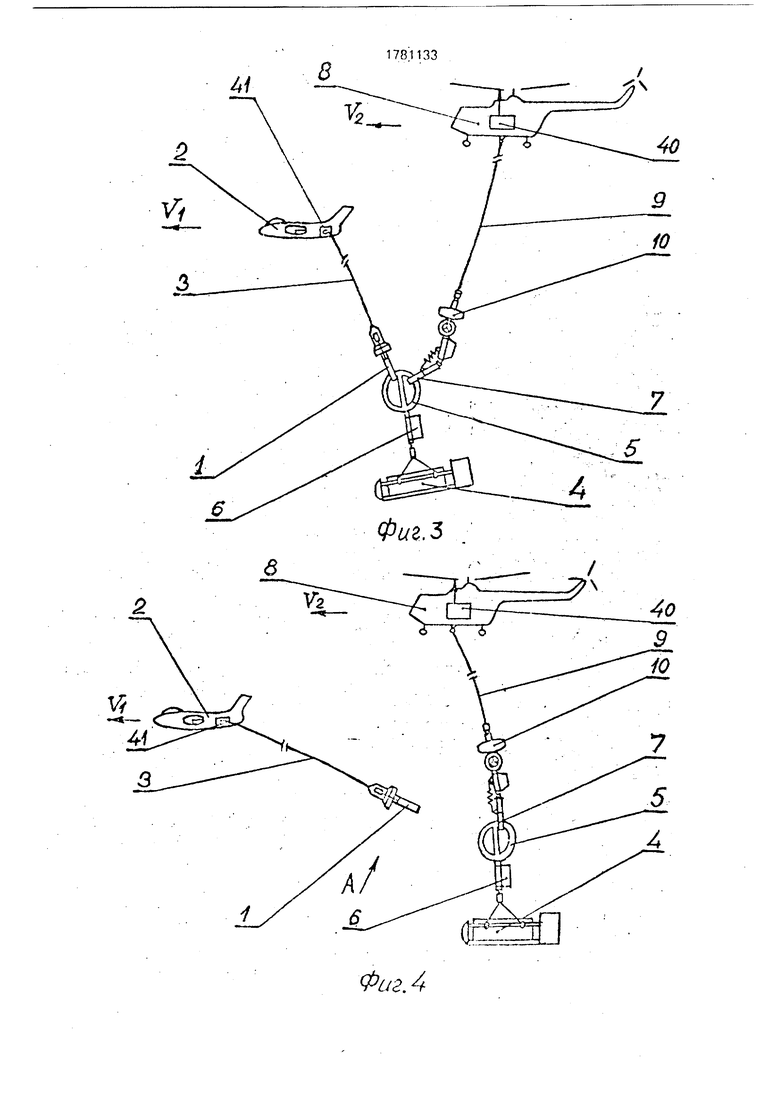
На фиг. 1 представлен общий вид устройства при синхронном перемещении летательных аппаратов; на фиг. 2 - общий вид устройства в процессе сближения захватно5 го приспособления дополнительного летательного аппарата и узла пересцепки буксируемого тела; на фиг. 3 - общий вид устройства после захвата кольца узла пересцепки захватным приспособлением допол0 нительного летательного аппарата; на фиг. 4 - общий вид устройства после отсоединения захватного приспособления основного летательного аппарата от кольца узла пересцепки; на фиг. 5 - общий вид устройства в
5 процессе сближения захватного приспособления дополнительного летательного аппарата и кольца узла пересцепки в изометрии; на фиг. 6 - конструкция узла пересцепки; на фиг. 7 - конструкция крепления кольца узла
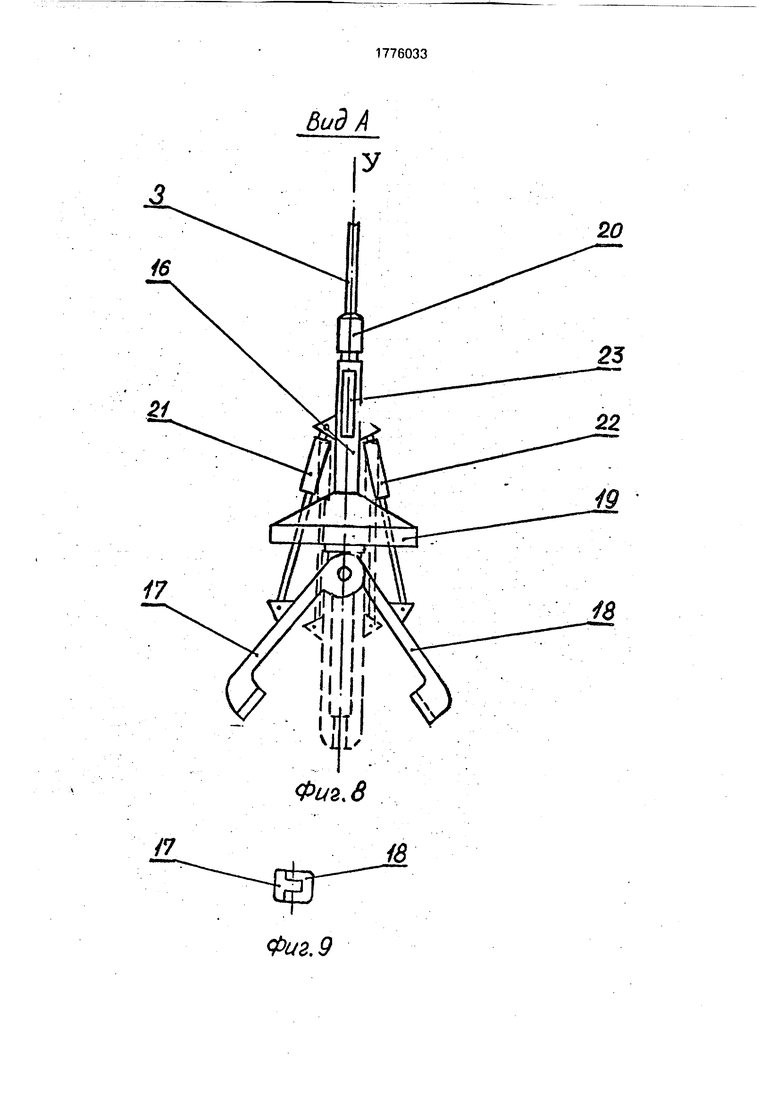
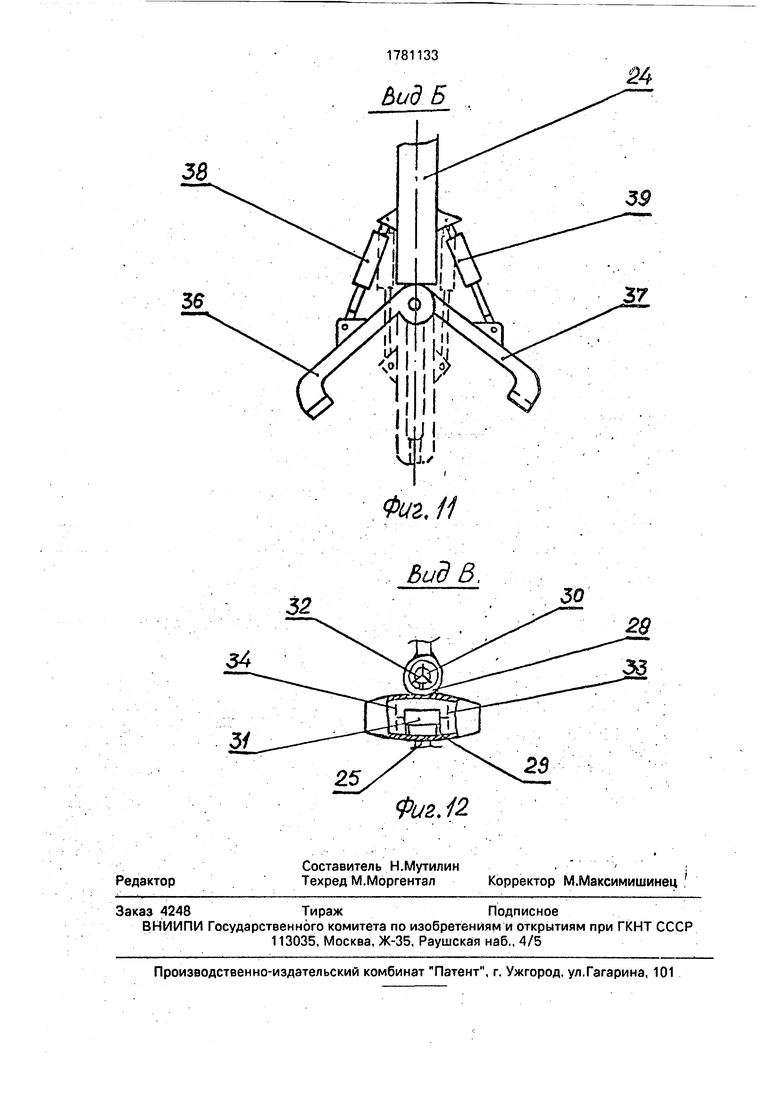
0 пересцепки к его стабилизатору в изометрии; на фиг. 8 - конструкция захватного приспособлениядополнительноголетательного аппарата, вид А; на фиг. 9 - вид с торца на раздвижные губки в замкну5 том положении; на фиг. 10 - конструкция захватного приспособления дополнительного летательного аппарата со средством его перемещения к узлу пересцепки; на фиг. 11 - конструкция захватного приспособле0 ния дополнительного летательного аппарата, вид Б; на фиг. 12 - конструкция захватного приспособления дополнительного летательного аппарата, вид В.
Способ реализуется устройством для
5 аэропересцепки буксируемого тела с одного летательного аппарата на другой; которое содержит захватное приспособление 1 основного летательного аппарата 2, например, самолета, соединенное с ним гибкой
связью 3, связанный с буксируемым телом А
узел пересцепки, выполненный в виде кольца 5 с перемычкой и его стабилизатором 6 по направлению потока, захватное приспособление 7 дополнительного летательного аппарата 8, соединенное с ним дополни- тельной гибкой связью 9, и связанный с захватным приспособлением 7 механизм 10 подвода захватного приспособления 7 к узлу пересцепки 5.
В устройстве механизм 10 подвода за- хватного приспособления 7 к узлу пересцепки 5 выполнен в виде движителя, установленного на захватном приспособлении 7 дополнительного летательного аппарата 8.
Кольцо 5 оканчивается ухом 11, установленным в вилке 12 стабилизатора б узла пересцепки по направлению потока с возможностью вращения вокруг стержня 13, выполненного, например, в виде болта.
Стабилизатор 6 узла пересцепки по направлению потока соединен с буксируемым телом 4, например, посредством вертлюга 14 и двухпарной подвесной системы 15.
Захватное приспособление 1 основного летательного аппарата 2 выполнено в виде корпуса 16 с двумя раздвижными губками 17,18 на конце и стабилизатора 19 положения губок в пространстве, закрепленного на корпусе 16, связанного с гибкой связью 3. Между корпусом 16 и гибкой связью 3 может быть установлен вертлюг 20 для снятия момента от гибкой связи 3. На корпусе 16 установлены механизмы 21 и 22, например, электромеханизмы типа МП-100М, связан- ные с раздвижными губками 17 и 18. Для исключения вращения захватного приспособления 1 вокруг продольной оси У и повышения устойчивости в боковой плоскости (по крену) центр масс захватного приспо- собления расположен ниже оси его вращения за счет прилива 23. В стабилизаторе 19 расположения губок в пространстве выполнены прорези для обеспечения связи штоков электромеханизмов 21 и 22 с раздвижными губками 17 и 18.
На одной из раздвижных губок 18 выполнен паз, а на другой 17 - выступ, который входит в паз при захвате кольца 5.
На захватном приспособлении 1 стаби- лизатор 19 расположения губок в пространстве выполнен в виде тормозного конуса с расширяющейся по направлению потока частью и обеспечивающим увеличение силы лобового сопротивления захватного при- способления, что позволяет уменьшить до требуемого значения угол наклона гибкой связи от линии горизонта.
Кольцо5(см. фиг. 6,7) имеет перемычку, делящую его пополам и обеспечивающую
требуемое расстояние между захватными приспособлениями 1 и 7,
Захватное приспособление 7 дополнительного летательного аппарата 8 выполнено в виде корпуса 24 и стабилизатора 25 положения губок в пространстве, связанных между собой пружиной 26 и выполненных с возможностью вращения друг относительно друга вокруг болтового соединения 27. Пружина 26 обеспечивает расположение под заданным углом корпуса 24 относительно стабилизатора 25 для удобства при подходе захватного приспособления 7 к кольцу 5 и его захвате. На стабилизаторе 25 положения губок в пространстве захватного приспособления 7 закреплен движитель 10, выполненный, например, в виде двух обтекателей 28,29, расположенных перпендикулярно друг другу, и двигателей 30 и 31 с винтами 32 и 33, 34, закрепленными на их осях и закрепленных в соответствующих обтекателях 28 и 29. Двигатель 30 с винтом 32 обеспечивает создание тяги для захватного приспособления 7 в направлении перемещения дополнительного летательного аппарата 8, а двигатель 31 с винтами 33, 34 обеспечивает создание тяги перпендикулярно направлению перемещения (влево или вправо). Между стабилизатором 25 и гибкой связью 7 может быть установлен вертлюг 35 для снятия момента от закручивания гибкой связи 7.
На корпусе 24 закреплены две раздвижные губки 36 и 37 и механизмы 38 и 39, например, электромеханизмы типа МП- 100М, связанные между собой. На одной из раздвижных губок 37 выполнен паз, а на другой 36 - выступ, который входит в паз при захвате кольца 5.
Для управления положением захватного приспособления 7 по высоте относительно кольца 5 на дополнительном летательном аппарате 8 установлено средство 40 управления дополнительным летательным аппаратом 8 в вертикальной плоскости.
Для изменения расстояния между телом 4 и основным летательным аппаратом 2 на последнем может быть установлена лебедка 41. Она также может использоваться для управления положением захватного приспособления 1 и кольца 5.
Стабилизатор 6 узла пересцепки по направлению потока и стабилизатор 25 положения губок в пространстве могут быть выполнены идентично в виде удобообтекае- мых профилей эллиптической формы, обеспечивающих заданное расположение раздвижных губок 36 и 37 относительно пересцепного кольца 5. Для наблюдения за процессом пересцепки на дополнительном летательном аппарате 8, основном летательном аппарате 2 установлены телекамеры. Телекамера 42 также может быть установлена на захватном приспособлении 7.
Тело А может быть самой различной формы и размеров, например, прямоугольной, квадратной и т. п., например, спасательным средством для экипажей кораблей и т. д.
Для обеспечения тела при буксировке с большой скоростью оно может быть установлено на платформе со стабилизирующим оперением как показано на фиг. 1-5.
Гибкие связи 3,9 могут быть выполнены в виде металлического, диэлектрического каната и т. п.
Управление электромеханизмами 21, 22,38,39, а также двигателями 30,31, может осуществляться, например, по кабель-тросу с борта летательного аппарата 2 и дополни- летательного аппарата 8.
В качестве вертолета 8 может быть использован вертолет типа Ми-24, Ми-26, а в качестве самолета - Су-27, Як-40 и другие.
Средство 40 управления дополнительным летательным аппаратом 8 (вертолетом) в вертикальной плоскости может быть выполнено в виде ручки Шаг-газ вертолета, изменяющего число оборотов винта и подъемную силу летательного аппарата, обеспечивая его перемещение в вертикальной плоскости.
Для определения усилий на гибких связях от буксируемого тела в месте их крепления к захватным приспособлениям могут быть установлены датчики натяжения, на- ,пример, тензодатчики, а на летательных аппаратах - установлены индикаторы натяжения.
Устройство, реализующее способ, работает следующим образом.
Дополнительный летательный аппарат 8, например, вертолет, располагают сзади основного летательного аппарата 2, буксирующего посредством гибкой связи 3, захватного приспособления 1, пересцепного кольца 5 со стабилизатором 6 тело 4, на разной высоте для уменьшения влияния спутного следа основного летательного аппарата 2 на дополнительный летательный аппарат 8 и добиваются их синхронного перемещения (Vi Va). С борта дополнительного летательного аппарата 8 по кабель-тросу 9 подают управляющий сигнал на включение двигателей 30, 3 i движителя 10 захватного приспособления 7.
Двигатель 30 с винтом 32 задает скорость Уз перемещения захватному приспособлению
7,превышающую скорость V2 перемещения дополнительного летательного аппарата 8 и
скорость Vi перемещения основного летательного аппарата 2. При этом, захватное приспособление 7 начинает сближаться с пересцепным кольцом 5, Процесс сближения наблюдается телекамерами на бортах
летательного и дополнительного летательного аппаратов 2 и 8, а также телекамерой 42, установленной на захватом приспособлении 7. В случае необходимости обеспечивают корректировку перемещения
захватного приспособления 7 по направлению, изменяя боковую силу с помощью двигателя 31 с винтами 33 и 34, а с помощью средства 40 управления дополнительным летательным аппаратом 8 обеспечивают
корректировку положения захватного приспособления 7 по высоте, изменяя подъемную силу дополнительного летательного аппарата 8. При достижении положения, указанного на фиг. 3 подают напряжение на
электромеханизмы 38 и 39 захватного приспособления 7. Электромеханизмы 38 и 39 перемещают раздвижные губки 36 и 37 до полного входа выступа губки 36 в паз губки 37. Для фиксации момента полного складывания губок на них могут быть установлены концевой выключатель и упор, которые взаи - модействуя выдают сигнал на летательные аппараты 2 и 8. Пд телекамере 42 удостоверяются в захвате приспособлением 7 пересцепного кольца 5. После этого выключают движитель 10 и подают напряжение на электромеханизмы 21 и 22 захватного приспособления 1. Электромеханизмы 21 и 22 перемещают раздвижные губки 17 и 18 из
исходного замкнутого положения (см. фиг.
8,пунктирные линии, фиг. 9) до полного раскрытия губок (см. фиг. 8, линии видимого контура), освобождая пересцепное кольцо 5. Под действием своего веса тело 4 после
окончания переходного процесса занимает установившееся положение, указанное на фиг. 4. Дальнейшая транспортировка тела 4, а также его посадка, например труднодоступных местах, осуществляется с помощью
дополнительного летательного аппарата 8. Все процессы наблюдаются телекамерами. Из фиг. 4 очевидно, что возможна безопасная обратная пересцепка с вертолета на самолет.
Предложенные способ аэропересцепки буксируемого тела с одного летательного аппарата на другой и устройство для его осуществления позволяют повысить безопасность и удобство пользования процессом пересцепки за счет обеспечения захвата пересцепного кольца буксируемого тела со стороны его задней полуплоскости, что позволяет обеспечить многократную воздушную пересцепку буксируемого тела.
Кроме того, снижается до минимального значения возможность соприкосновения захватных приспособлений, а также гибкой связи и дополнительного летательного аппарата, что также увеличивает безопасность пересцепки.
Значительно повышается и удобство при использовании предлагаемых способа и устройства для его осуществления за счет расширения области свободного простран- ства для размещения дополнительного летательного аппарата и свободного перемещения его захватного приспособления.
Предложенные способ и способ для аэропересцепки буксируемого тела с одного летательного аппарата на другой позволяют также осуществить многократную воздушную пересцепку за счет быстрой замены захватных приспособлений на земле при наличии двух летательных аппаратов.
Формула изобретения
1 Способ аэропересцепки буксируемого тела с одного летательного аппарата на другой, заключающийся в перемещении буксируемого тела на гибкой связи основным летательным аппаратом с его захватным приспособлением, синхронном с ним перемещении дополнительного летательного аппарата с его захватным приспособле- нием на дополнительной гибкой связи,
перемещении захватного приспособления дополнительного летательного аппарата к буксируемому телу, захвате буксируемого тела захватным приспособлением дополнительного летательного аппарата, отсоединении буксируемого тела от гибкой связи основного летательного аппарата, отличающийся тем, что, с целью повышения безопасности и удобства пользования процессом аэропересцепки, перемещение захватного приспособления дополнительного летательного аппарата к буксируемому телу осуществляют в направлении перемещения.
2. Устройство для аэропересцепки буксируемого тела с одного летательного аппарата на другой, содержащее захватное приспособление основного летательного аппарата, соединенное с ним гибкой связью, связанный с буксируемым телом узел пересцепки, выполненный в виде кольца с перемычкой и его стабилизатором по направлению потока, захватное приспособление дополнительного летательного аппарата, соединенное с ним дополнительной гибкой связью, и связанный с захватным приспособлением механизм подвода захватного приспособления к узлу пересцепки, отличающееся тем, что, с целью повышения безопасности и удобства пользования процессом аэропересцепки, механизм подвода захватного приспособления к узлу пересцепки выполнен в виде движителя, установленного на захватном приспособлении дополнительного летательного аппарата.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ аэропересцепки буксируемого тела с одного летательного аппарата на другой и устройство для его осуществления | 1989 |
|
SU1684165A1 |
| УСТРОЙСТВО ДЛЯ ВЫПУСКА-УБОРКИ БУКСИРУЕМОГО ОБЪЕКТА | 1995 |
|
RU2094321C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| Устройство для буксировки измерителя магнитного поля | 1990 |
|
SU1770930A1 |
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1837036A1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1992 |
|
RU2015074C1 |
| Буксируемая система | 1991 |
|
SU1810235A1 |
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1791280A1 |
| Устройство для буксировки и выпуска - уборки буксируемого тела | 1991 |
|
SU1749124A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА В ОБЛАКАХ | 1992 |
|
RU2015072C1 |



Изобретение относится к авиационной технике, в частности к способам и конструкциям устройств для многократной воздушной пересцепки буксируемого тела с одного летательного аппарата на другой, например с самолета на вертолет, с вертолета на вертолет и т. д. и может быть использовано в гражданской авиации для перевозки буксируемых тел и грузов, их подъема и посадки в труднодоступных местах и т. п. Цель - повышение безопасности и удобства пользования процессом аэропересцепки. СпоV, ц соб заключается в перемещении бускируе- мого тела на гибкой связи основным летательным аппаратом с его захватным приспособлением, синхронном с ним перемещении дополнительного летательного аппарата с его захватным приспособлением и осуществлении аэропересцепки буксируемого тела с одного захватного приспособле- ния на другое, производя при этом перемещение захватного приспособления дополнительного летательного аппарата к буксируемому телу в направлении его перемещения. Устройство для реализации способа содержит захватное приспособление 1 с пересцепным кольцом 5 и стабилизатором 7 основного летательного аппарата 2, буксирующего на гибкой связи 3 тело 4, а также захватное приспособление 7 дополнительного летательного аппарата 8 с кабелем- тросом 9, на котором подвешено захватное приспособление 7 и по которому передаются команды от средства 40 управления захватным приспособлением 7 и установленным на нем движителем 10. 2 с. п, ф-лы, 12 ил. VS 09 Ы ы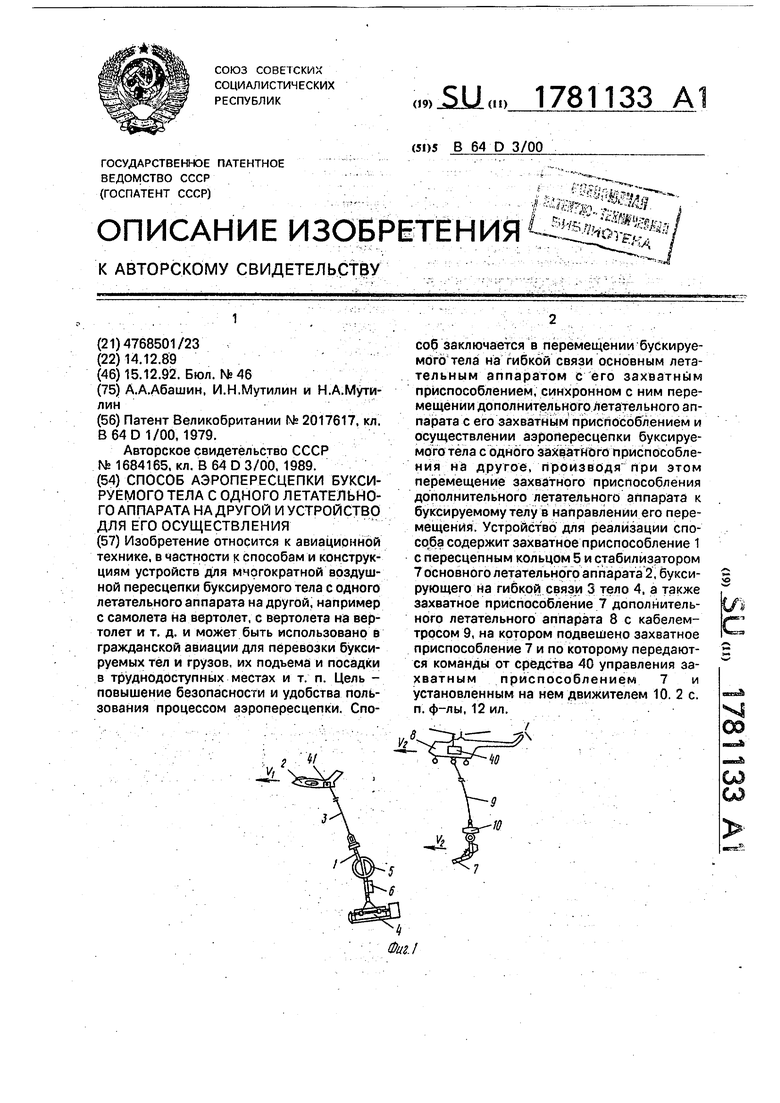
И/
Фиг 2
Фиг. 4
8
фиг. 5
Фи2.7
Фиг. 6
Вид А
Фиъ.8
Фиг. 9
20
29
Фиг. 10
38
Sad В.
| ПРЕСС ДЛЯ ТЕРМООБРАБОТКИ ДЛИННОМЕРНЫХ СТЫКОВ ИЗДЕЛИЙ | 1992 |
|
RU2017617C1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Способ аэропересцепки буксируемого тела с одного летательного аппарата на другой и устройство для его осуществления | 1989 |
|
SU1684165A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
