Изобретение относится к авиационной технике, в частности к способам и конструкциям устройств для воздушной пересцепки буксируемого тела с одного летательного аппарата на другой, и может быть использовано для увеличения дальности перевозок буксируемых тел, а также при подъеме и посадке тел в условиях ограниченного пространства.
Известен способ аэропересцепки буксируемого тела с одного летательного аппарата на другой, заключающийся в перемещении буксируемого тела (несущей трубы с тормозным устройством и средством вооружения)на гибкой связи основным летательным аппаратом, синхронном с ним перемещении дополнительного летательного аппарата с захватным приспособлением, подводе-захватного приспособления дополнительного летательного аппарата к буксируемому телу, захвате буксируемого тела захватным приспособлением дополнительного летательного аппарата, отсоединении буксируемого тела от гибкой связи, приеме буксируемого тела на борт дополнительного летательного аппарата (патент США № 316727S, кл. 244-137, 1965), недостатками которого являются трудности при захвате буксируемого тела с расположенными на нем средствами из-за его неустойчивости, а также низкая безопасность из-за значительных динамических нагрузок, действующих на дополнительный летательный аппарат от силы веса буксируемого тела после отсоединения гибкой связи.
Наиболее близким по технической сущности к предлагаемому является способ аэропересцепки буксируемого тела с одного летательного аппарата на другой, заключающийся в перемещении буксируемого тела на гибкой связи основным летательным аппаратом с его захватным приспособлением и стабилизации положения буксируемого тела с помощью автопилота, синхронном с ним перемещении дополнительного летательного аппарата с его захватным приспособлением, подводе захватного приспособления дополнительного летательного аппарата к буксируемому телу в направлении, перпендикулярном направлению полета, захвате буксируемого тела захватным приспособлением дополнительного летательного аппарата, отсоединении буксируемого тела от гибкой связи, подтягивании буксируемого тела к дополнительному летательному аппарату (патент Великобритании № 2017617, кл. В 64 D 1/00, 1979).
Данный способ устраняет недостатки аналога, связанные с трудностями при захвате буксируемого тела (несущей трубы) с расположенными на нем средствами (автопилотом, системой вооружения и т.д.) за счет обеспечения устойчивости буксируемого тела автопилотом и наличия у буксируемого тела подъемной силыу,большей силы его веса G (), что обеспечивает требуемое взаимное расположение буксируемого тела и захватного приспособления дополни0 тельного летательного аппарата, но, как и аналог,имеет низкие эксплуатационные характеристики при пересцепке тяжелых тел, у которых сила веса значительно больше подъемной силы из-за невозможности
5 подвода захватного приспособления допол- нительного летательного аппарата в направлении, перпендикулярном направлению полета, а также низкую безопасность из-за значительных динамиче0 ских нагрузок, действующих на дополнительный летательный аппарат от силы веса буксируемого тела после отсоединения гибкой связи. К другим недостаткам данного способа относится невозможность
5 обеспечения аэропересцепки буксируемого тела на вертолетных скоростях (от V 180 км/ч и выше) из-за незначительной подъемной силы Y буксируемого тела, что не позволяет обеспечить заданное расположение
0 буксируемого тела и захватного приспособления дополнительного летательного аппарата, а это, в свою очередь, сужает диапазон скоростей, на которых может быть осуществлена пересцепка.
5Цель изобретения - расширение эксплуатационных характеристик за счет расширения диапазона скоростей, в котором осуществляется пересцепка в воздухе буксируемых тел, и повышение безопасности
0 при пересцепке.
Поставленная цель достигается тем, что в способе аэропересцепки буксируемого тела с одного летательного аппарата на другой, заключающемся в перемещении
5 буксируемого тела на гибкой связи основным летательным аппаратом с его захватным приспособлением, синхронном с ним перемещении дополнительного летательного аппарата с его захватным приспособле0 нием, подводе захватного приспособления дополнительного летательного аппарата к буксируемому телу, захвате буксируемого тела захватным приспособлением дополнительного летательного аппарата, отсоеди5 нении буксируемого тела от гибкий связи согласно изобретению, подвод захватного приспособления дополнительного летательного аппарата к буксируемому телу осу- ществляютвнаправлении,
противоположном направлению перемещения буксируемого тела, а после захвата буксируемого тела захватным приспособлением дополнительного летательного аппарата производят снижение основного летательного аппарата до момента передачи усилия от веса буксируемого тела на дополнительный летательный аппарат.
Известно устройство для аэросцепки буксируемого тела с одного летательного аппарата на другой, содержащее захватное приспособление основного летательного аппарата, соединенное с ним гибкой связью, узел пересцепки, связанный с буксируемым телом, захватное приспособление дополнительного летательного аппарата, механизм подвода захватного приспособления дополнительного летательного аппарата к узлу пересцепки, механизм приема буксируемого тела на борт дополнительного летательного аппарата (патент США № 3167278, кл. 244-137, 1965), недостатком которого является неустойчивость буксируемого тела с расположенной на нем системой вооружения, что приводит к затруднениям при буксировке и операци- ях захвата и приема, выполняемых с летательных аппаратов, а также низкая безопасность при пересцепке в воздухе тяжелых грузов за счет значительных динамических нагрузок, действующих на дополнительный летательный аппарат при отсоединении гибкой связи.
Наиболее близким по технической сущности к предлагаемому является устройство для аэропересцепки буксируемого тела с одного летательного аппарата на другой, содержащее захватное приспособление основного летательного аппарата, соединенное с ним гибкой связью, узел пересцепки, связанный с буксируемым телом, выполнен- ным в виде крыла, на котором расположена система вооружения и автопилот, захватное приспособление дополнительного летательного аппарата, механизм подвода захватного приспособления дополнительного летательного аппарата к узлу пересцепки, механизм подтягивания буксируемого тела к дополнительному летательному аппарату (патент Великобритании N 2017617, кл. В 6401/00,1979).
Данное устройство устраняет недостатки аналога, связанные с необходимостью обеспечения устойчивости буксируемого тела и с затруднениями при буксировке и операциях захвата и приема за счет наличия у буксируемого тела подъемной силы Y, большей силы его веса G (), и наличия автопилота на буксируемом теле, но, как и аналог, имеет низкую безопасность при пересцепке в воздухе тяжелых грузов за счет
значительных динамических нагрузок, действующих на дополнительный летательный аппарат при отсоединении гибкой связи . К другим недостаткам данного устройства относится невозможность обеспечения аэропересцепки буксируемого тела на вертолетных скоростях (от 180 км/ч и выше) из-за незначительной подьемной силы Y, буксируемого тела, что не позволяет обеспечить заданное расположение буксируемого тела и захватного приспособления дополнительного летательного аппарата и сужает диапазон скоростей, на которых может быть осуществлена аэропересцепка.
Цель изобретения - расширение эксплуатационных характеристик за счет расширения диапазона скоростей, в котором осуществляется пересцепка в воздухе буксируемых тел, и повышение безопасности при пересцепке.
Поставленная цель достигается тем, что устройство для аэродинамической пересцепки буксируемого тела с одного летательного аппарата на другой, содержащее захватное приспособление основного летательного аппарата, соединенное с ним гибкой связью, узел пересцепки, связанный с буксируемым телом, захватное приспособление дополнительного летательного аппарата к узлу, механизм подвода захватного приспособления дополнительного летательного аппарата к узлу пересцепки, согласно изобретению, снабжено дополнительной гибкой связью, закрепленными на захватном приспособлении допол- нительного летательного аппарата стабилизатором его положения в пространстве и механизмом передачи усилия от веса буксируемого тела на дополнительный летательный аппарат, выполненным в виде установленного на основном летательном аппарате регулятора его подъемной силы, причем узел пересцепки выполнен в виде кольца с перемычкой и его стабилизатором по направлению потока, механизм подвода захватного приспособления дополнительного летательного аппарата к узлу пересцепки выполнен в виде лебедки, установленной на дополнительном летательном аппарате, а захватное приспособление дополнительного летательного аппарата соединено с механизмом его подвода к узлу пересцепки через дополнительную гибкую связь.
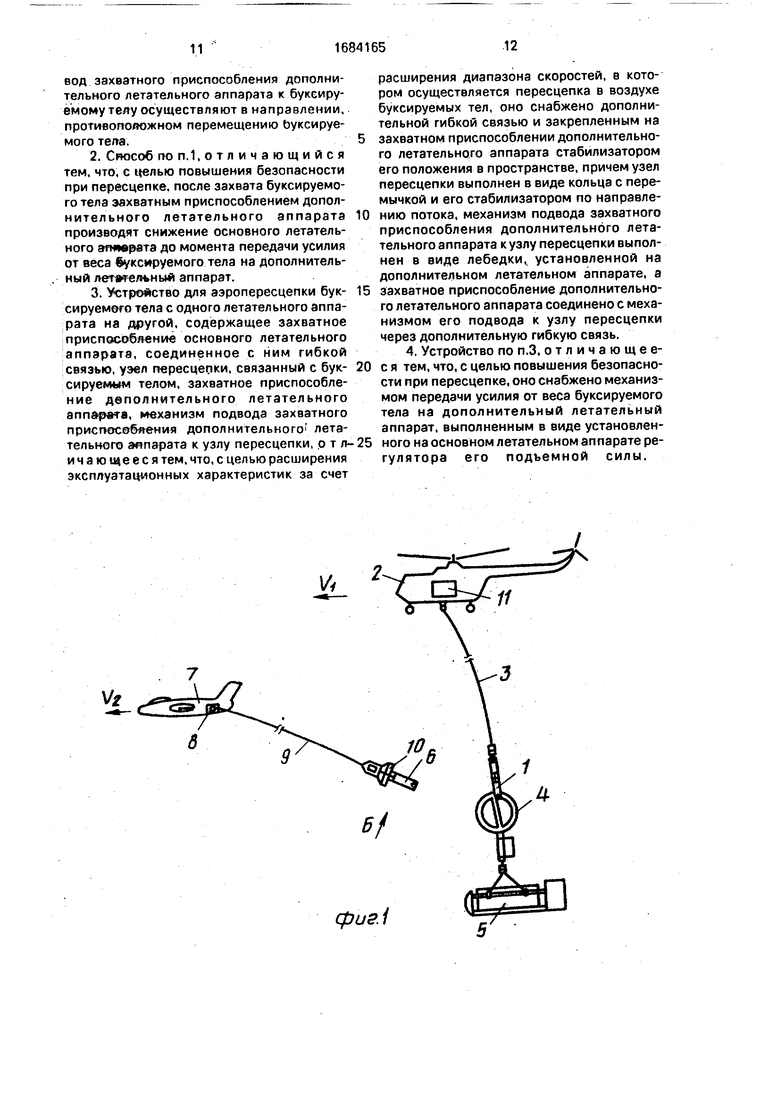
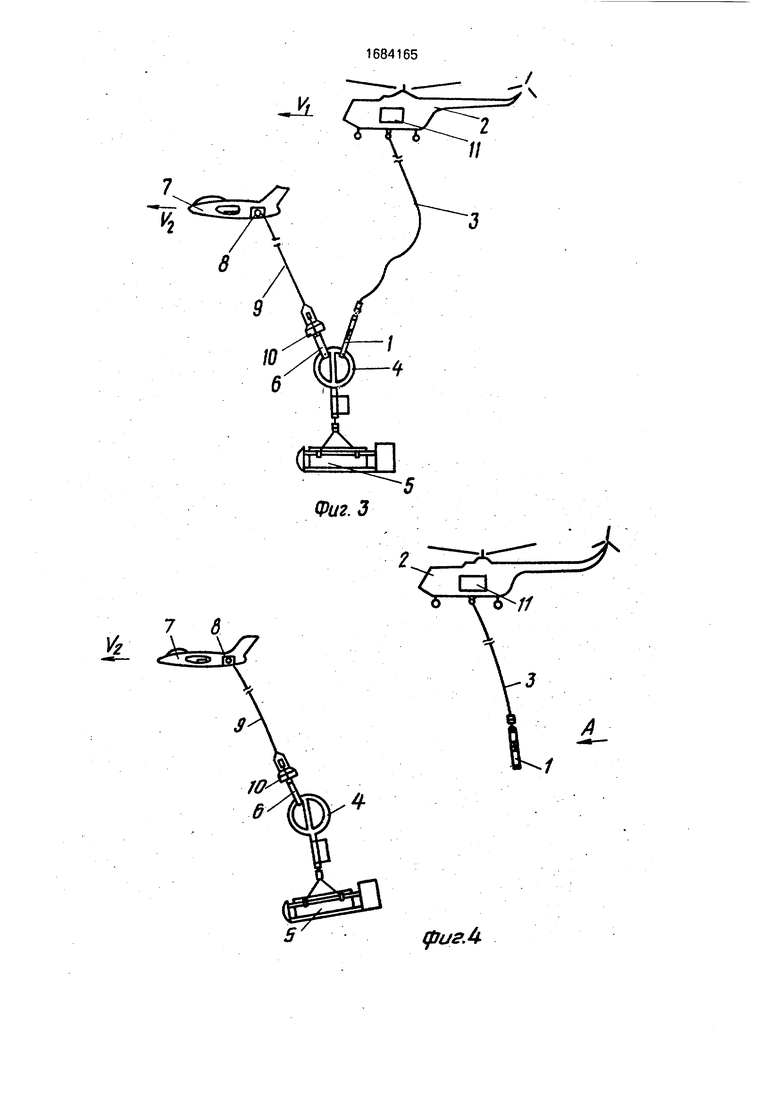
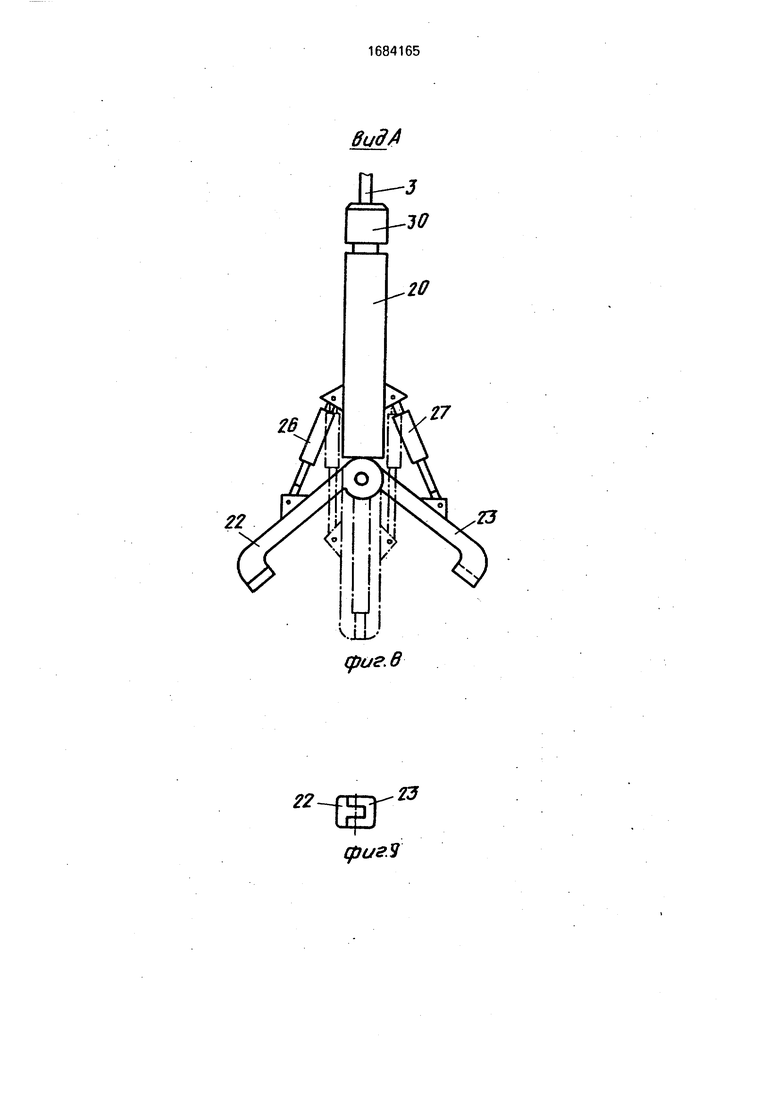
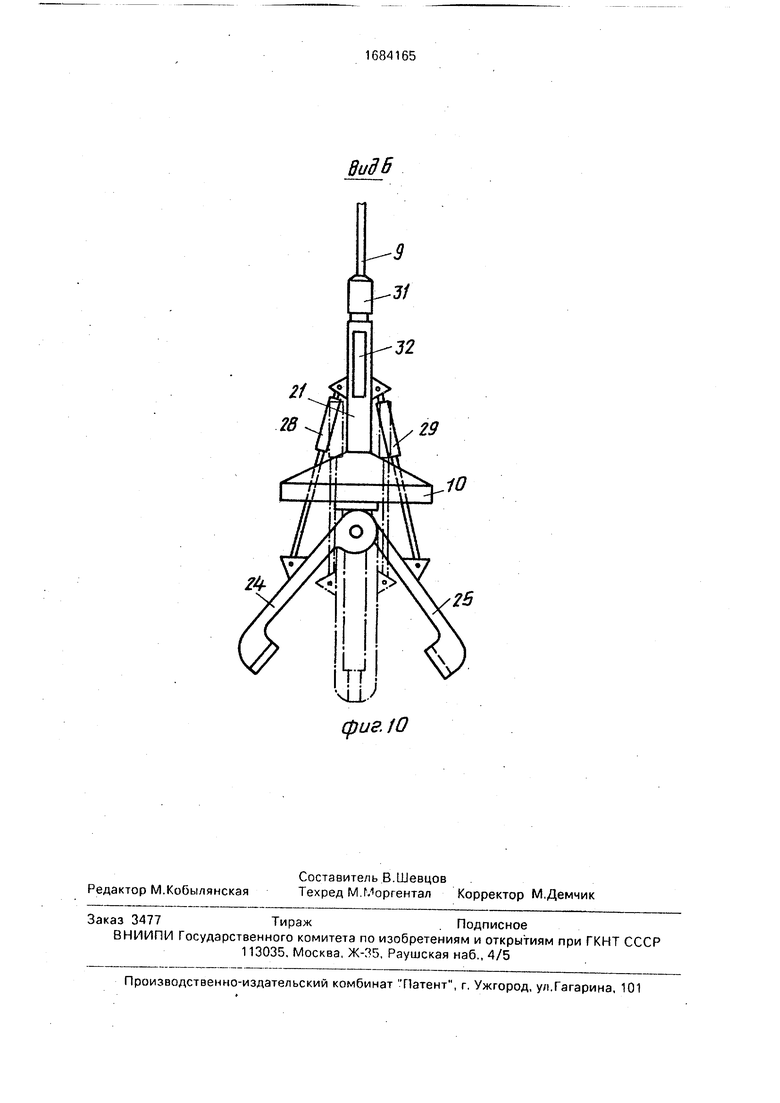
Конструкция устройства, реализующего способ, представлена на фиг.1-10, на фиг.1 изображено устройство в процессе сближения, общий вид; на фиг.2 - устройство после захвата кольца узла пере сцепки захватным приспособлением дополнительного летательного аппарата, общий вид; на фиг.З - устройство после передачи усилия от веса буксируемого тела на дополнительный летательный аппарат, общий вид; на фиг.4 - устройство после отсоединения захватного приспособления основного летательного аппарата от кольца узла пересцепки, общий вид; на фиг.5 - устройство на фиг. 1 в изомет- рии, общий вид; на фиг.б - конструкция узла пересцепки; на фиг.7 - конструкция крепления кольца узла пересцепки к его стабилизатору по направлению потока; на фиг.8 - конструкция захватного приспособления основного летательного аппарата, вид А на фиг.4; на фиг. 9- вид с торца на раздвижные губки захватного приспособления основного летательного аппарата; на фиг. 10 - конструкция захватного приспособления дополнительного летательного аппарата, вид Б на фиг.1.
Способ реализуется устройством для аэропересцепки буксируемого тела с одного летательного аппарата на другой, которое содержит захватное приспособление 1 основного летательного аппарата 2, соединенное с ним гибкой связью 3, узел 4 пересцепки, связанный с буксируемым телом 5, захватное приспособление 6 дополнительного летательного аппарата 7, механизм 8 подачи захватного приспособления дополнительного летательного аппарата к узлу 4 пересцепки.
Устройство также снабжено дополнительной гибкой связью 9, закрепленными на захватном приспособлении 6 дополнительного летательного аппарата 7 стабилизатором 10 его положения в пространстве и механизмом 11 передачи усилия от веса буксируемого тела 5 на дополнительный летательный аппарат 7, выполненным в виде установленного на основном летательном аппарате 2 регулятора его подъемной силы.
Узел 4 пересцепки выполнен в виде кольца 12 с перемычкой 13 и его стабилизатором 14 по направлению потока, соединенного с буксируемым телом 5, например посредством вертлюга 15 и двухпарной подвесной системы 16.
Кольцо Доканчивается ухом 17, установленным в вилке 18 стабилизатора 14 узла пересцепки по направлению потока с возможностью вращения вокруг стержня 19, выполненного, например, в виде болта.
Механизм 8 подвода захватного при- способления дополнительного летательного аппарата к узлу 4 пересцепки выполнен в виде лебедки, установленной на дополнительном летательном аппарате 7.
Захватное приспособление 6 дополнительного летательного аппарата 7 соединено с механизмом 8 его подвода к узлу 4 пересцепки через дополнительную гибкую связь 9.
Каждое захватное приспособление 1 и 6
выполнено в виде корпуса 20 и 21 с двумя раздвижными губками 22 и 23 (24 и 25) на конце и связано с соответствующей гибкой связью 3 и 9. На корпусах 20 и 21 захватных приспособлений 1 и 6 установлены электромеханизмы 26, 27 и 28, 29, связанные с раздвижными губками 22, 23 и 24, 25. Между корпусом 20(21) и гибкой связью 3(9) может быть установлен вертлюг 30(31) для снятия момента от гибкой связи 3(9). На одной из
раздвижных губок 23(25) выполнен паз, а на другой 22(24) - выступ, который входит в паз при захвате кольца 12. Перемычка 13 делит кольцо 12 пополам и обеспечивает требуемое расстояние между захватными приспособлениями 1(6).
Стабилизатор 14 узла пересцепки по направлению потока выполнен в виде обтекаемого эллиптического профиля, обеспечивающего заданное расположение
кольца 12 в потоке.
На захватном приспособлении 6 стабилизатор 10 его положения в пространстве выполнен в виде тормозного конуса с расширяющейся по направлению потока частью и обеспечивающим увеличение силы бокового сопротивления захватного приспособления 6, что позволяет уменьшить до требуемого значения угол наклона гибкой связи 9 от линии горизонта.
В стабилизаторе 10 положения захватного приспособления 6 в пространстве выполнены прорези для обеспечения связи штоков электромеханизмов 28 и 29 с раздвижными губками 24 и 25.
Для исключения вращения тормозного конуса 10 и раздвижных губок 24 и 25 вокруг оси вращения конуса и повышения устойчивости захватного приспособления в боковой плоскости (по крену) центр масс
захватного приспособления 6 расположен ниже оси вращения конуса за счет прилива 32.
Для наблюдения за процессом пересцепки на дополнительном летательном аппарате 7, а также на основном летательном аппарате 2 установлены телекамеры.
Тело 5 может быть самой различной формы и размеров, например прямоугольной, квадратной и т.п., а также спасательным средством для экипажей кораблей и т.д. Для обеспечения устойчивости тела при буксировке с большой скоростью оно может быть установлено на платформе со стабилизирующим оперением,
Управление электромеханизмами 26- 29 может осуществляться, например, по ка- бель-тросу с борта основного 2 или дополнительного 7 летательного аппарата.
Для определения момента передачи усилия от буксируемого тела 5 с основного 2 на дополнительный 7 летательный аппарат на гибких связях 3 и 9 в месте их крепления к основному 2 и дополнительному 7 летательным аппаратам (или в месте крепления их к захватным приспособлениям) установлены датчики измерения натяжения, например тензодатчики, а на борту летательных аппаратов должны быть установлены индикаторы натяжения гибких связей.
Устройство, реализующее способ, работает следующим образом.
В начальный момент времени тело 5 буксируется основным летательным аппаратом 2, например вертолетом, через гибкую связь 3, захватное приспособление 1, узел 4 пересцепки, а дополнительный летательный аппарат 7, например самолет, располагают впереди основного летательного аппарата 2 и на разной с ним высоте для уменьшения влияния спутного следа дополнительного летательного аппарата 7 на основной летательный аппарат 2, и добиваются их синхронного перемещения. Расстояние между дополнительным 7 и основным 2 летательными аппаратами определяют исходя из условий безопасности и снижения влияния спутного следа дополнительного летательного аппарата 7 на гибкую связь 3. Лебедкой 8 производят подвод захватного приспособления 6 к узлу 4 пересцепки, увеличивая длину дополнительной гибкой связи 9. Процесс подвода захватного приспособления 6 к узлу 4 пересцепки наблюдают с помощью телекамер, расположенных на бортах основного 2 и дополнительного 7 летательных аппаратов. В случае необходимости обеспечивают корректировку положения захватного приспособления 6 как по высоте, так и по направлению относительно узла 4 пересцепки, изменяя подъемную и боковую силы дополнительного летательного аппарата 7 при неизменном положении основного летательного аппарата 2 по высоте и положению. Возможна и обратная корректировка положения основного летательного аппарата 2 по высоте и направлению с целью подвода узла 4 пересцепки к захватному приспособлению 6 при неизменном положении по высоте и направлению дополнительного летательного аппарата 7. При достижении положения, указанного на фиг.2, подают напряжение на электромеханизмы 28 и 29 захватного приспособления
6, которые перемещают раздвижные губки 24 и 25 до полного входа выступа губки 24 в паз губки 25. Для фиксации момента полного складывания раздвижных губок (фиг.10,
пунктирные линии) 24 и 25 на них могут быть соответственно установлены концевой выключатель и упор, которые, взаимодействуя, выдают сигнал на основной 2 и дополнительный 7 летательные аппараты. По теле0 камерам удостоверяются в захвате приспособлением 6 кольца 12 узла 4 пересцепки. После этого с помощью механизма 11 передачи усилия от веса буксируемого тела 5 на дополнительный летательный ап5 парат 7 начинают снижать основной летательный аппарат 2. Усилие на гибкой связи 3 начинает уменьшаться, а на дополнительной гибкой связи 9 возрастать. При достижении усилием на дополнительной гибкой
0 связи 9 значения исходного усилия на гибкой связи 3 производят дальнейшее снижение основного летательного аппарата 7 до полного ослабления гибкой связи 3, после чего подают напряжение на электромеха5 низмы 26 и 27 захватного приспособления 1. Электромеханизмы 26 и 27 перемещают раздвижные губки 22 и 23 из исходного положения до полного раскрытия губок, освобождая кольцо 12, и дальнейшая буксировка
0 груза 5 осуществляется дополнительным летательным аппаратом 7. Процесс расстыковки захватного приспособления 1 наблюдается телекамерами основного 2 и дополнительного 7 летательных аппаратов.
5 Длину гибких связей 3 и 9 выбирают исходя из конструктивных соображений, а именно исходя из исключения попадания основного летательного аппарата 2 в спутный след дополнительного летательного аппарата 7 в
0 процессе ослабления гибкой связи 3. Формула изобретения 1. Способ аэропересцепки буксируемого тела с одного летательного аппарата на другой, заключающийся в перемещении
5 буксируемого тела на гибкой связи основным летательным аппаратом с его захватным приспособлением, синхронном с ним перемещении дополнительного летательного аппарата с его захватным приспособле0 нием, подводе захватного приспособления дополнительного летательного аппарата к буксируемому телу, захвате буксируемого тела захватным приспособлением дополнительного летательного аппарата, отсоеди5 нении буксируемого тела от гибкой связи, отличающийся тем, что, с целью расширения эксплуатационных характеристик за счет расширения диапазона скоростей, в котором осуществляется пересцеп ка в воздухе буксируемых тел, подвод захватного приспособления дополнительного летательного аппарата к буксируемому телу осуществляют в направлении, противоположном перемещению буксируемого теп-а.
2.Способ по п.1,отличающийся тем, что, с целью повышения безопасности при пересцепке, после захвата буксируемого тела захватным приспособлением дополнительного летательного аппарата производят снижение основного летательного аппарата до момента передачи усилия
от веса буксируемого тела на дополнительный летательный аппарат.
3.Устройство для ээропересцепки бук- сируемого тела с одного летательного аппарата на другой, содержащее захватное приспособление основного летательного аппарата, соединенное с ним гибкой связью, узел пересцепки, связанный с бук- сируемым телом, захватное приспособление двполнительного летательного аппарата, механизм подвода захватного приспособления дополнительного1 летательного аппарата к узлу пересцепки, о т л- и ч а ю ще е с я тем, что, с целью расширения эксплуатационных характеристик за счет
расширения диапазона скоростей, в котором осуществляется пересцепка в воздухе буксируемых тел, оно снабжено дополнительной гибкой связью и закрепленным на захватном приспособлении дополнительного летательного аппарата стабилизатором его положения в пространстве, причем узел пересцепки выполнен в виде кольца с перемычкой и его стабилизатором по направлению потока, механизм подвода захватного приспособления дополнительного летательного аппарата к узлу пересцепки выполнен в виде лебедки, установленной на дополнительном летательном аппарате, а захватное приспособление дополнительного летательного аппарата соединено с механизмом его подвода к узлу пересцепки через дополнительную гибкую связь.
4. Устройство по п.З. отличающее- с я тем, что, с целью повышения безопасности при пересцепке, оно снабжено механизмом передачи усилия от веса буксируемого тела на дополнительный летательный аппарат, выполненным в виде установленного на основном летательном аппарате ре- гулятора его подъемной силы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ аэропересцепки буксируемого тела с одного летательного аппарата на другой и устройство для его осуществления | 1989 |
|
SU1781133A1 |
| Устройство для буксировки и выпуска - уборки буксируемого тела | 1991 |
|
SU1749124A1 |
| УСТРОЙСТВО ДЛЯ ВЫПУСКА-УБОРКИ БУКСИРУЕМОГО ОБЪЕКТА | 1995 |
|
RU2094321C1 |
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1791280A1 |
| Устройство для буксировки измерителя магнитного поля | 1990 |
|
SU1770930A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА В ОБЛАКАХ | 1992 |
|
RU2015072C1 |
| Способ определения аэродинамических характеристик моделей и устройство для его осуществления | 1986 |
|
SU1462970A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ТЕЛА | 1988 |
|
SU1619602A1 |
| Устройство для стабилизации буксируемой гибкой антенной системы | 1988 |
|
SU1729916A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ТЕЛ | 1989 |
|
SU1797239A2 |

Изобретение относится к авиационной технике, в частности к способам и конструкциям устройств для пересцепки в воздухе буксируемого тела с одного летательного аппарата на другой, и может быть использовано для увеличения дальности перевозок буксируемых тел, а также при подъеме и посадке тел в условиях ограниченного пространства. Цель изобретения - расширение ®U2 2 эксплуатационных характеристик за счет расширения диапазона скоростей, в котором осуществляется пересцепка в воздухе буксируемых тел и повышение безопасности при пересцепке. Расширение диапазона скоростей обеспечивается за счет подвода захватного приспособления 6 в направлении, противоположном направлению перемещения буксируемого тела 5, чем обеспечивается его захват на малых скоростях, когда подъемная сила буксируемого тела 5 недостаточна для вывода его в положение, обеспечивающее захват сверху. Такой подвод обеспечивается размещением захватного приспособления 6 на гибкой связи 9 и наличием тормозного конуса 10, обеспечивающего расположение захватного приспособления 6, близкое к горизонтальному. Повышение безопасности при пересцепке обеспечивается передачей усилия от веса тела с основного летательного аппарата 2 на дополнительный 7, что достигается с помощью регулятора подъемной силы летательного аппарата 2. 2 с. и 2 з.п. ф-лы, 10 ил. CD w Ј о 00 Ј о ел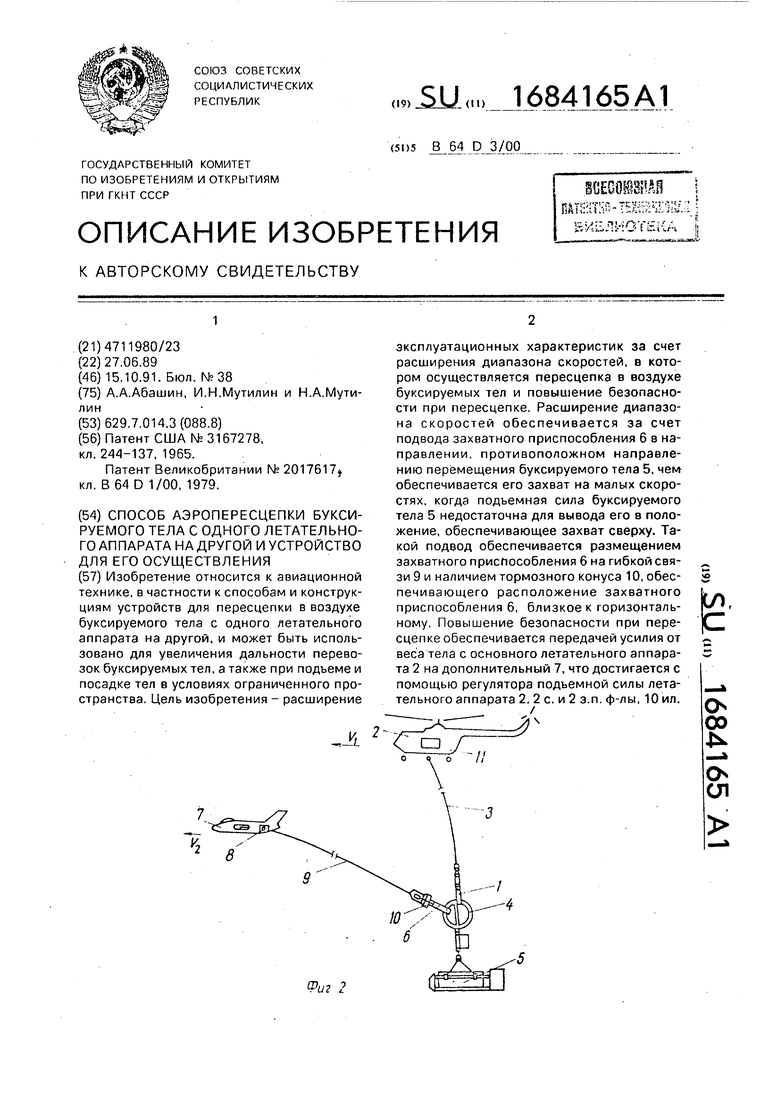
W
W
фиг.
Фиг. 3
Vz
фигЛ
1684165
фиг 5
фиг 6
фиг.7
ti
Ј1
Ьалф
S3гг
д -гп(Ь
9t
f-tT
№W
99lt-89l
Вид В
фиг. 10
| Патент США Мг 3167278, кл | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
| ПРЕСС ДЛЯ ТЕРМООБРАБОТКИ ДЛИННОМЕРНЫХ СТЫКОВ ИЗДЕЛИЙ | 1992 |
|
RU2017617C1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
