1 Изобретение относится к химической
промышленности -и машиностроению, может быть использовано при регулировании расхода газа или жидкости, а также при управлении сварочньми автомат; тами и является усовершенствованием изобретения по авт. св. № 736045, .
Цель изобретения - повыгвениё :Трч- ности системы.
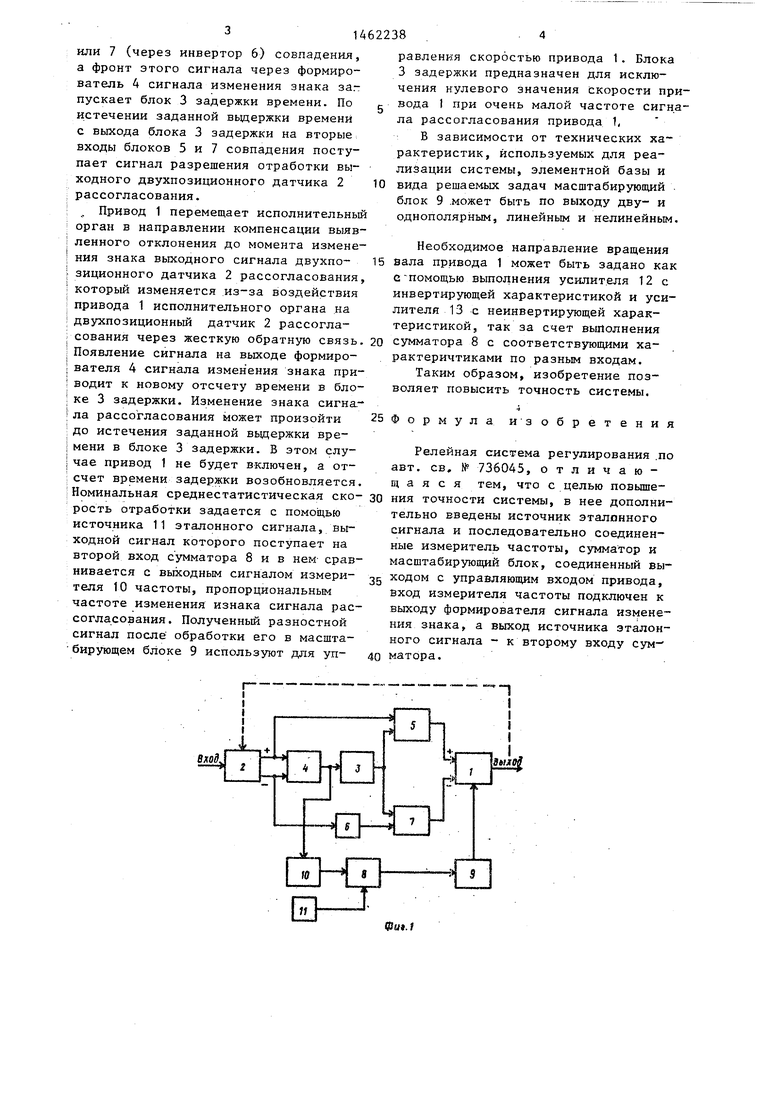
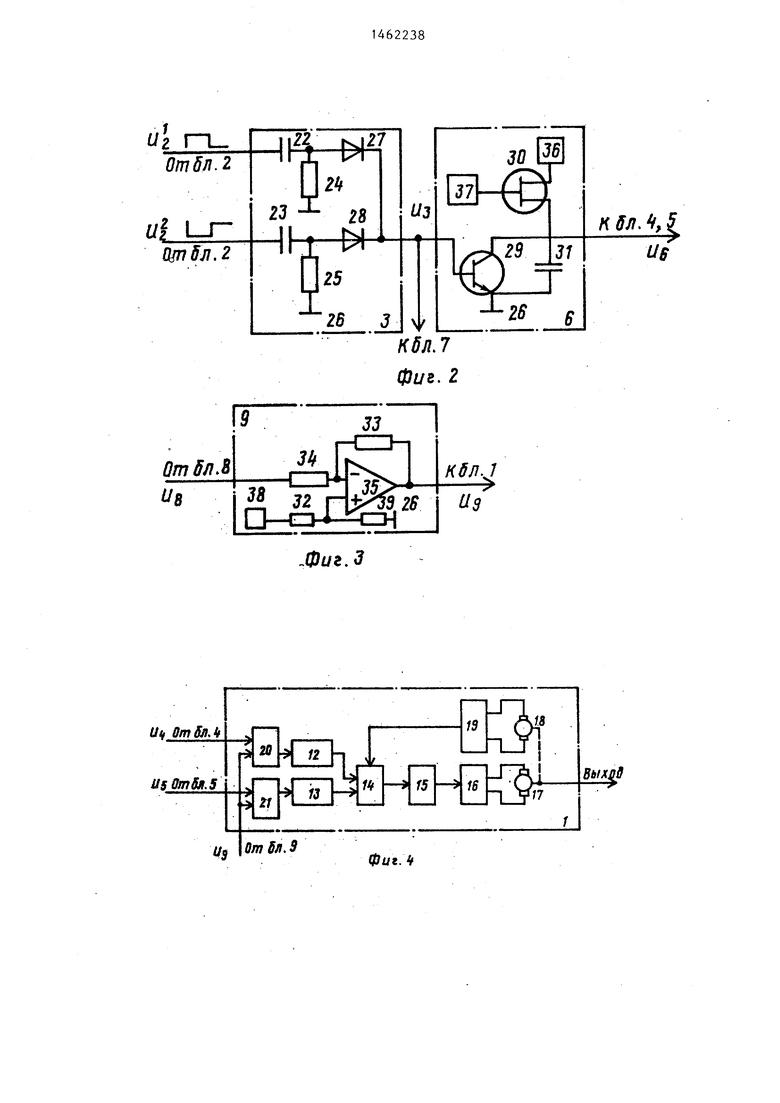
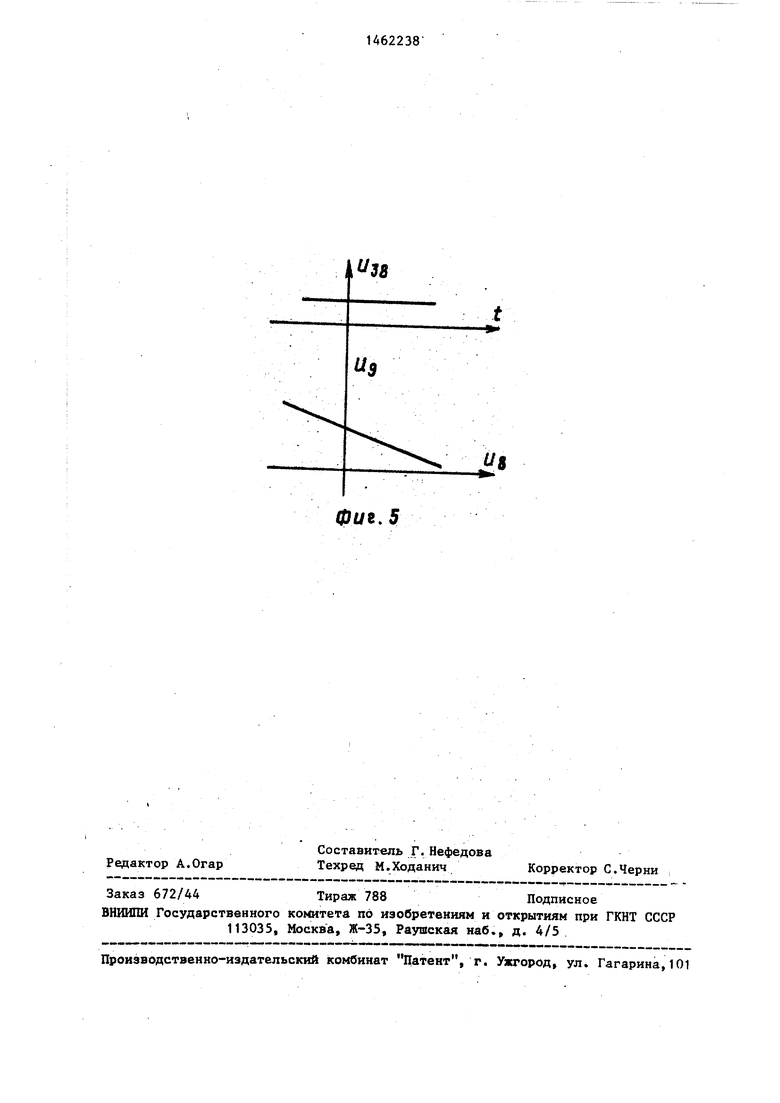
На фиг.1 приведена функциональная схема системы; на фиг.2-4 - структурные схемы отдельных блоков системы; на фиг.5 - характеристики, пояснякицие работу системы.
На фиг. 1-5 - обозначены :привод 1, двухпозиционный датчик 2 рассогласования, блок 3 задержки, формирователь 4 сигнала изменения знака, первый . блок 5 совпадения, инвертор 6, второй блок 7 совпадения, сумматор 8, масштабирующий блок 9, измеритель 10 частотЫл источник 11 эталонного сигнала, усилители 12 и 13, сумматор 14, блок 15 фазового управления, тирис- .торный преобразователь 16, двигатель 17, техогенератор 18, фильтр 19, ключи 20 и 21 , лсонденсаторы 22 и 23, резисторы 24 и 25, общая шина 26, диоды 27 и 28, транзистор 29, полевой транзистор 30, конденсатор 31, резист торы- 32-34, операционный усилитель 35, источник 36 напряжения питания, источник 37 и 38 напряжения смещения, резистор 39, выходной сигнал U,- i-ro блока или элемента системы и сигнал Ui на J-M выходе i-ro блока или элемента системы.
Система работает следующим образом.
При отклонении регулируемой величины от заданного значения на одном из выходов двухпозиционного датчика 2 рассогласования появляется сигнал, который поступает на вход блока 5
ц р
S9 Ьд
00
00
14)
или 7 (через инвертор 6) совладения, а фронт этого сигнала через формирователь 4 сигнала изменения знака за.- пускает блок 3 задержки времени. По истечении заданной вьщержки времени с выхода блока 3 задержки на вторые входы блоков 5 и 7 совпадения поступает сигнал разрешения отработки выходного двухпозиционного датчика 2 рассогласования.
., Привод 1 перемещает исполнительньй орган в направлении компенсации выявленного отклонения до момента изменения знака выходного сигнала двухпозиционного датчика 2 рассогласования, который изменяется из-за воздействия привода 1 исполнительного органа на двухпозиционный датчик 2 рассогла10
равления скоростью привода 1. Блока 3 задержки предназначен для исключения нулевого значения скорости при вода 1 при очень малой частоте сигна ла рассогласования привода 1,
В зависимости от технических характеристик, используемых для реализации системы, элементной базы и вида решаемых задач масштабирующий . блок 9 .может быть по выходу дну- и однополярным, линейным и нелинейным.
Необходимое направление вращения 15 вала привода 1 может быть задано как с ПОМОЩЬЮ выполнения усилителя 12 с инвертирующей характеристикой и усилителя 13 с неинвертирующей характеристикой, так за счет выполнения сования через жесткую обратную связь. 20 сумматора 8 с соответствующими ха- Появление сигнала на выходе формиро- рактеричтиками по разным входам, вателя 4 сигнала изменения знака при- Таким образом, изобретение поз- водит к новому отсчету времени в бло- воляет повысить точность системы. ке 3 задержки. Изменение знака сигнала рассогласования может произойти 25 Формул а и°-зобретения до истечения заданной вьщержки времени в блоке 3 задержки. В этом случае привод 1 не будет включен, а отсчет времени задержки возобновляется.
Релейная система регулирования .по авт. ев, № 736045, отличаю - - .-... щ а я с я тем, что с целью повышеНоминальная среднестатистическая ско- зо ния точности системы, в нее дополни- рость отработки задается с помощью тельно введены источник эталонного
сигнала и последовательно соединенные измеритель частоты, сумматор и масштабирующий блок, соединенный выисточника 11 эталонного сигнала, выходной сигнал которого поступает на второй вход с умматора 8 и в нем сравнивается с вьпсодным сигналом измери- 35 ходом с управляющим входом привода, теля 10 частоты, пропорциональным вход измерителя частоты подключен к частоте изменения изнака сигнала рассогласования. Полученный разностной сигнал после обработки его в масшта бирующем блоке 9 используют для упвыходу формирователя сигнала изменения знака, а выход источника эталонного сигнала - к второму входу сум- 40 матора.
равления скоростью привода 1. Блока 3 задержки предназначен для исключения нулевого значения скорости привода 1 при очень малой частоте сигнала рассогласования привода 1,
В зависимости от технических характеристик, используемых для реализации системы, элементной базы и вида решаемых задач масштабирующий . блок 9 .может быть по выходу дну- и однополярным, линейным и нелинейным.
35 ходом с управляющим входом привода, вход измерителя частоты подключен к
выходу формирователя сигнала изменения знака, а выход источника эталонного сигнала - к второму входу сум- 40 матора.
Фиъ.5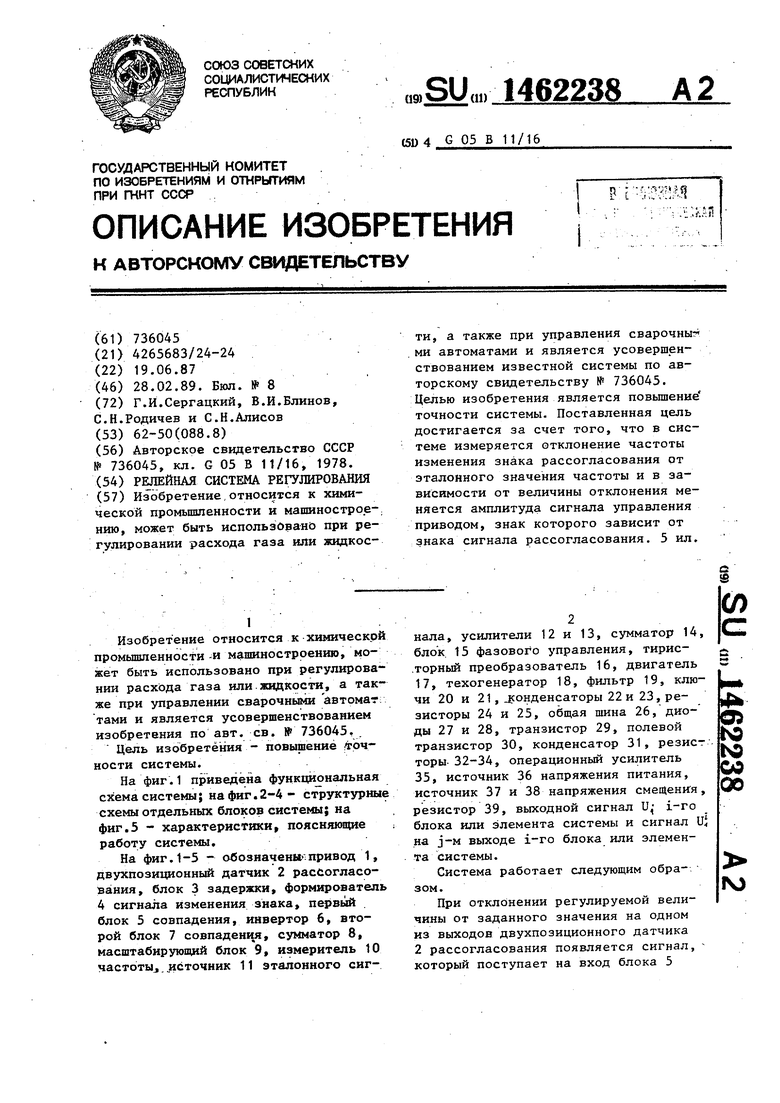
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейная система регулирования | 1987 |
|
SU1462239A2 |
| Релейная система регулирования | 1978 |
|
SU736045A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Импульсная следящая система | 1986 |
|
SU1746359A1 |
| Релейная следящая система с нелинейной коррекцией | 1984 |
|
SU1223205A1 |
| Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата | 2015 |
|
RU2611459C1 |
| Система автоматического управления циклическими процессами | 1983 |
|
SU1124247A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2132079C1 |
| Следящая система | 1986 |
|
SU1564589A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
Изобретение.относится к химической промьшшанности и машинострое-. нию, может быть использовано при регулировании расхода газа или жидкости, а также при управления сварочные ми автоматами и является усовершенствованием известной системы по авторскому свидетельству № 736045. Целью изобретения является повьппение точности системы. Поставленная цель достигается за счет того, что в системе измеряется отклонение частоты изменения знака рассогласования от эталонного значения частоты и в зависимости от величины отклонения меняется амплитуда сигнала управления приводом, знак которого зависит от знака сигнала рассогласования. 5 ил.
| Релейная система регулирования | 1978 |
|
SU736045A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
