1
Изобретение относится к химической промышленности и машиностроению, может быть использовано при .регулировании расхода газа или жидкости, а также при управлении сварочными автомаг тами и является усовершенствованием изобретения по авт. св. № 736045.
Цель изобретения - повьшение точности системы.
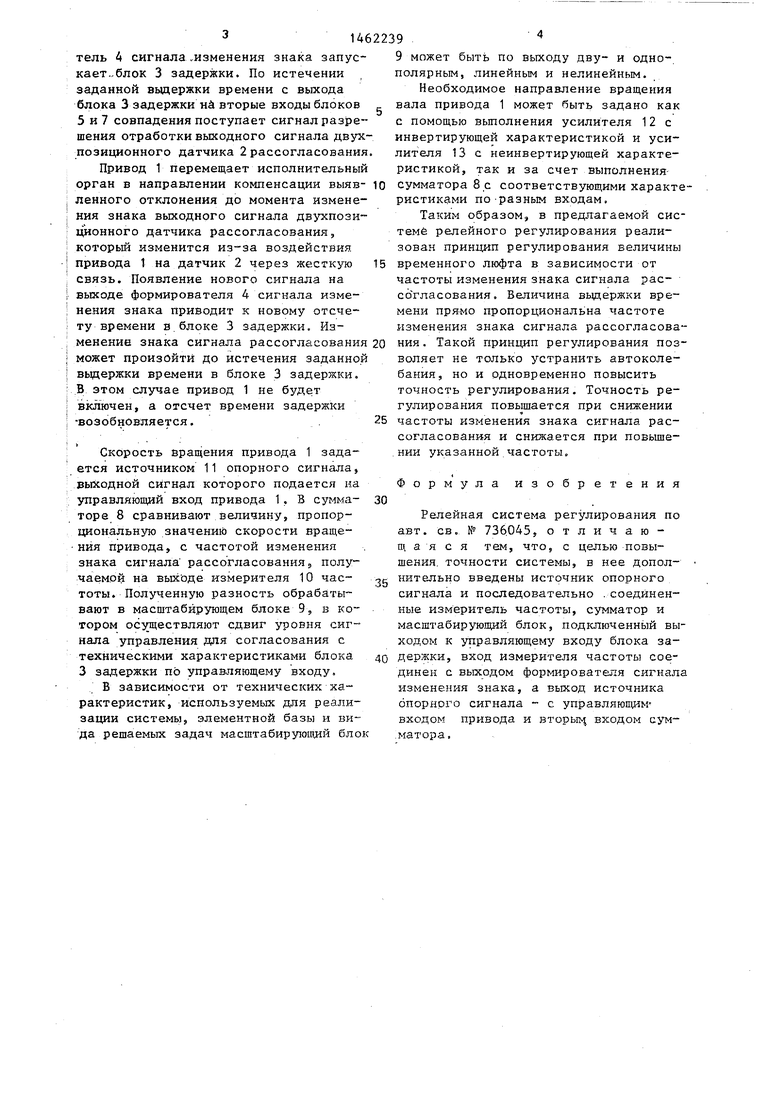
На фиг.1 приведена функциональная схема системы; на фиг.2-4 - структурные схемы отдельных блоков системы; на фиг.5 - характеристики, поясняющие работу системы.
На фиг.1-5 обозначены привод 1, двухпозиционный датчик 2 рассогласования, блок 3 задержки, формирователь 4 сигнала изменения знака, первый блок 5 совпадения, инвертор 6, второй блок 7 совпадения, сумматор 8, мас- штабируюпзий блок 9, измеритель 10 частоты, источник 11 опорного сигнаг ла,усилители 12 и 13, сумматор 14,
блок 15 фазового управления, тирис- торный преобразователь 16, двигатель 17, тахогенератор 18, фильтр 19 клю- .чи 20 и 21, конденсаторы 22-24, резисторы 25-29, общая шина 30, источник 31 напряжения, транзистор 32, полевой транзистор 33, операционный усилитель 34, диоды 35 и 36, источник 37 напряжения смещения, резисторы 38 и 39, операционный усилитель 40, выходной сигнал U- i-ro блока или ..элемента системы и сигнал U на j-м выходе i-ro блока или элемента системы.
Система работает следующим образом.
При отклонении регулируемой величины от заданного значения на одном из выходов двухпозиционного датчика 2 рассогласования появляется сигнал, который поступает на вход блока 5 или 7 (через инвертор 6) совпадения, а фронт этого сигнала через формироваW
143
тель 4 сигнала ..изменения знака запус- кает.,блок 3 задержки. По истечении заданной выдержки времени с выхода блока 3 задержки ни вторые входы блоков 5 и 7 совпадения поступает сигнал разрешения отработки выходного сигнала двух- позиционного датчика 2 рассогласования. Привод 1 перемещает исполнительный
9 может быть по выходу дву- и одно-, полярным, линейным и нелинейным.
Необходимое направление вращения вала привода 1 может быть задано как с помощью вьшолнения усилителя 12 с инвертирующей характеристикой и усилителя 13 с неинвертирующей характеристикой, так и за счет выполнения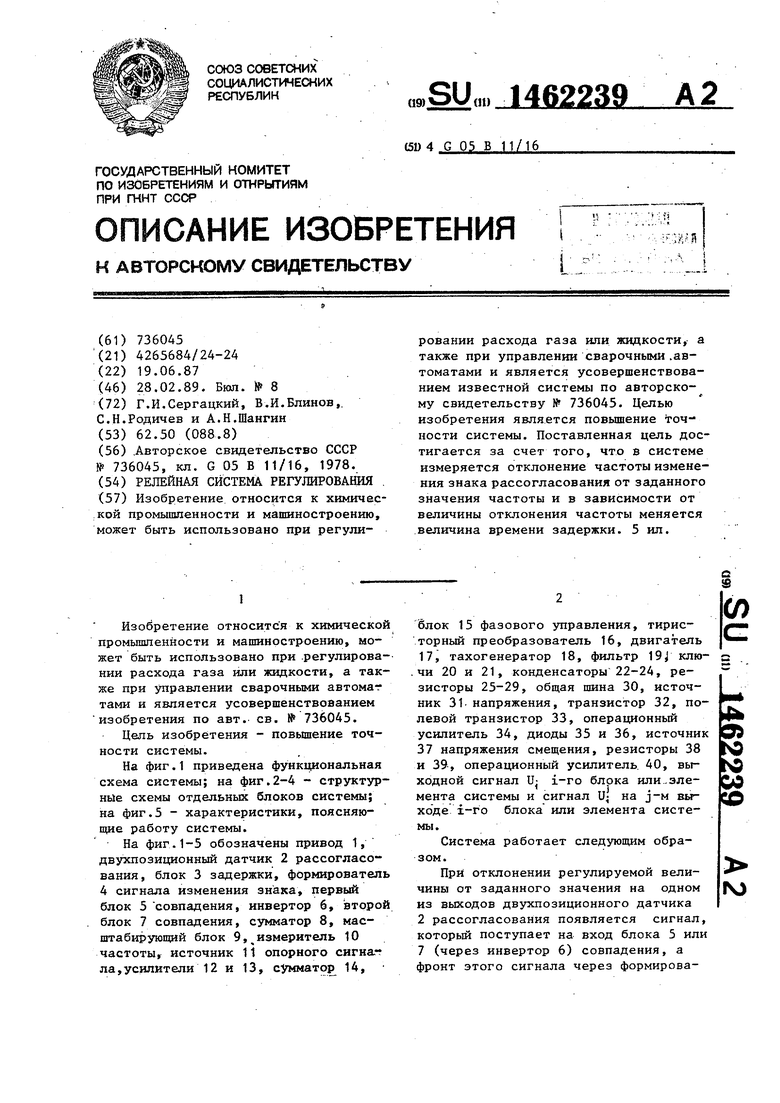
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейная система регулирования | 1987 |
|
SU1462238A2 |
| Система автоматического управления циклическими процессами | 1983 |
|
SU1124247A1 |
| Импульсная следящая система | 1986 |
|
SU1746359A1 |
| Релейная система регулирования | 1978 |
|
SU736045A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |

Изобретение относится к химической промышленности и машиностроению, может быть использовано при регулировании расхода газа или жидкости, а также при управлении сварочными .автоматами и является усовершенствованием известной системы по авторскоf му свидетельству № 736045. Целью изобретения является повьшение точности системы. Поставленная цель достигается за счет того, что в системе измеряется отклонение частоты изменения знака рассогласования от заданного значения частоты и в зависимости от величины отклонения частоты меняется величина времени задержки. 5 ил.
орган в направлении компенсации выяв- ю сумматора 8 с соответствующими характе
ленного отклонения до момента изменения знака выходного сигнала двухпози- ционного датчика рассогласования, который изменится из-за воздействия привода 1 на датчик 2 через жесткую связь. Появление нового сигнала на выходе формирователя 4 сигнала изменения знака приводит к новому отсчету времени в.блоке 3 задержки. Изменение знака сигнала рассогласования может произойти до истечения заданной вьщержки времени в блоке 3 задержки, В этом случае привод 1 не будет включен, а отсчет времени задержки возобновляется..
Скорость вращения привода 1 задается источником 11 опорного сигнала, выходной сигнал которого подается на управляющий вход привода 1. В сумматоре 8 сравнивают величину, пропорциональную значению скорости враще- нйя привода, с частотой изменения знака сигнала рассогласования, получаемой на выходе измерителя 10 частоты. Полученную разность обрабатывают в масштабирующем блоке 9, в котором осуществляют сдвиг уровня сигнала управления для согласования с техническими характеристиками блока 3 задержки по управляющему входу.
В зависимости от технических характеристик, используемых для реализации системы, элементной базы и вида решаемых задач масштабирующей бло
5
5
0
ристиками по-разным входам.
Таким образом, в предлагаемой системе релейного регулирования реализован принцип регулирования величины временного люфта в зависимости от частоты изменения знака сигнала рас- со гласования. Величина вьвдержки времени прямо пропорциональна частоте изменения знака сигнала рассогласования . Такой принцип регулирования позволяет не только устранить автоколебания, но и одновременно повысить точность регулирования. Точность регулирования повышается при снижении частоты изменения знака сигнала рассогласования и снижается при повыше- .НИИ указанной.частоты.
Формула изобретения
5
Релейная система регулирования по авт. св. N 736045, отличающаяся тем, что, с целью повышения, точности системы, в нее дополнительно введены источник опорного сигнала и последовательно .соединенные измеритель частоты, сумматор и масштабирующий блок, подключенный выходом к управляющему входу блока за- 0 держки, вход измерителя частоты соединен с выходом формирователя сигнала изменения знака, а выход источника опорного сигнала - с управляющим- входом привода и вторьп. входом сум- .матора.
Кдл.7 Фиг. 2
фиг. 1
От дл. В
От Sjf.
фиг.З
Выход
Фи&.
| Релейная система регулирования | 1978 |
|
SU736045A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
