Изобретение относится к автоматике и может быть использовано в системах автоматического управления и регулирования с невысокими точности ными характеристиками.
Цель изобретения - уменьшение проводов электрической связи.
На чертеже представлена структ:)ф- ная схема устройства.
; Устройство для дистанционной пе- |редачи угловых перемещений содержит |сельсин-датчик 1 и сельсин-приемник |2, каждый из которых имеет обмотки р возбуждения и обмотки 4 синхрони- зации, источник 5 переменного тока. Обмотки 4 синхронизации, соединенные Церез обмотки 3 возбуждения с источ ком 5, имеют вдвое меньшее количе- JCTBO витков, чем остальные обмотки |сиихронизацш1.
I Устройство работает следующим образом.
; Под воздействием переменного тока Источника 5 в,обмотках 3 возбужде- |ния сельсинов 1 и 2 образуется пере- Йенный магнитный поток, который воздействует на обмотки 4 синхронизации В обмотках 4 синхронизации создаются магнитные потоки самоиндукции,, При согласованном угловом положении роторов сельсинов 1 и 2 результир ло- оие магнитные потоки в каждом из сельсинов i и 2 равны нулю. При нали углового рассогласования роторов сельсинов 1 и 2 в обмотках 4 синхронизации наводятся не равные по величине ЭДС, что приводит к появлению уравнительных токов в обмотках 4 синхронизации и соединяющих их ли- ВИЯХ. Вызваннь1е уравнительными тока- миомагиитные потоки обмоток 4 синхронизации взаимодействуют с магнитными потоками обмоток 3 возбуждения, создавая вращающий момент ротора .:. сельсина-приемника 2 в сторону уменьшения угла рассогласования.
Число необходимых линий связи сокращается в данном устройстве до трех
При этом погрешность передачи угла возрастает за счет снижения токов в обмотках возбуждения и уменьшения величины момента синхронизации, что ограничивает область применения та- кнх устройств.
Формула изобретени
Устройство для дистанционной передачи угловых перемещений, содержащее сельсин-датчик, и сельсин-приемник, начало обмотки возбуждения сельсина-датчика подключен к одному выходу источника переменного тока, другой выход которого соединен с концом обмотки возбуждения сельсина-приемника, одни выводы первой и второй обмоток синхронизации сельсина-датчика соединены между собой, одни выводы первой и второй обмоток синхронизации сельсина-приемника соединены между собой, другие выводы первой и второй обмоток сельсина-датчика соединены с другими вьшодами первой и второй обмоток сельсина-приемника соответственно, отличающее- с я тем, что, с целью уменьшения количества проводов электрической связи устройства, в нем один и другой выводы третьей обмотки синхронизации сельсина-датчика соединены соответственно с концом обмотки во.з- буждения и одним выводом первой обмотки синхронизации сельсина-датчика, один и другой вьгеоды третьей обмотки синхронизации сельсина-приемника соединены соответственно с началом обмотки возбуждения и одним выводом первой обмотки синхронизации сельсина-приемника, причем третьи обмотки синхронизации сельсина-датчика и сельсина-приемника вьтолнены в вдвое меньшим количеством витков по сравнению с количеством витков каждой из остальных обмоток синхронизации сельсина-датчика и сельсина- приемника соответственно.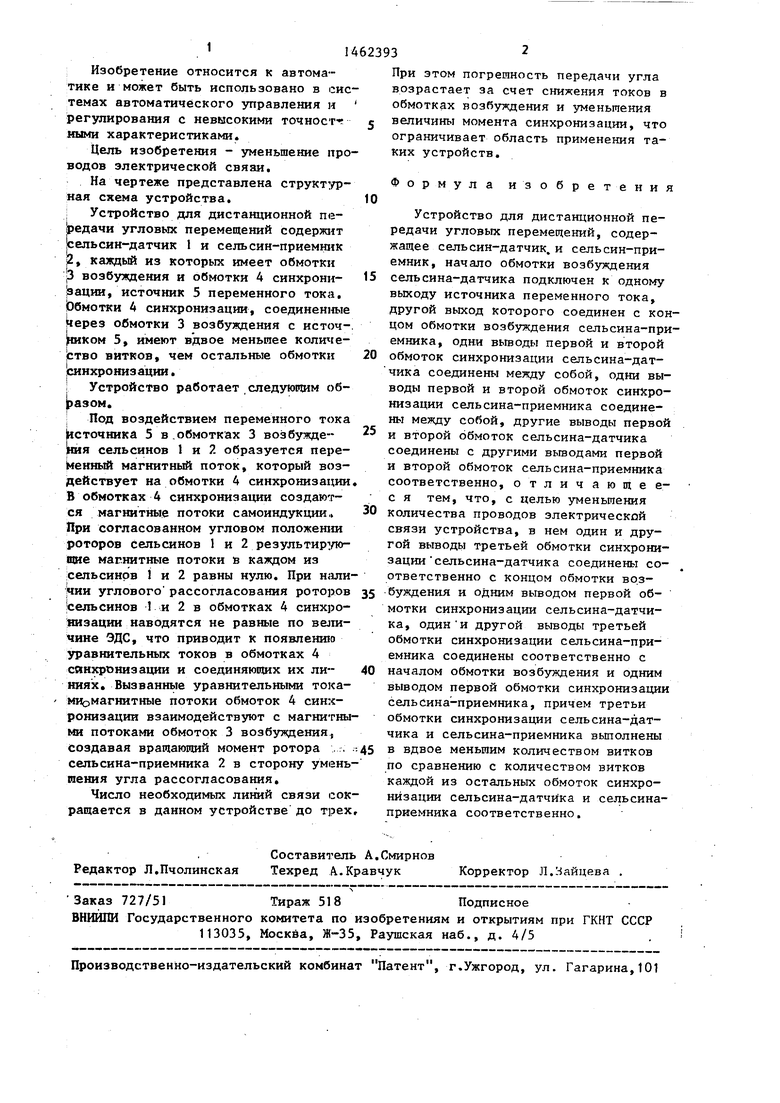
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угловых перемещений | 1985 |
|
SU1314362A1 |
| Устройство для дистанционной передачи угловых перемещений | 1987 |
|
SU1424046A1 |
| Схема включения двух сдвоенных бескон-ТАКТНыХ СЕльСиНОВ | 1979 |
|
SU828201A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ЭЛЕКТРИЧЕСКИЙ ИНФОРМАЦИОННЫЙ СИГНАЛ | 2007 |
|
RU2327222C1 |
| Преобразователь угла рассогласования валов в напряжение | 1986 |
|
SU1336068A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| БЕСКОНТАКТНЫЙ СОВМЕЩЕННЫЙ СЕЛЬСИН-ДВИГАТЕЛЬ(МОТОСИН) | 1970 |
|
SU287176A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| Система синхронной связи | 1946 |
|
SU69777A2 |
| Система передачи углового положения вала | 1980 |
|
SU936004A1 |
Изобретение относится к автоматике и может быть использовано в системах автоматического управления и регулирования с невысокими точностными характеристиками. С целью уменьшения проводов электрической связи в устройстве для дистанционной передачи угловых перемещений, содержащем сельсин-датчик 1 и сельсин-приемник 2 с обмотками 3 возбуждения и обмотками 4 синхронизации, источник 5 переменного тока, вьшоды третьей обмотки синхронизации сельсина-датчика соединены соответственно с концом обмотки возбуждения и общими вьшода- ми первой и второй обмоток синхронизации сельсина-датчика, выводы третьей обмотки синхронизации сельсина-приемника соединены соответственно с началом обмотки возбуждения и общими вьшодами первой и второй обмоток синхронизации сельсина-приемника, причем третьи обмотки синх- фонизации сельсина-датчика и сельсина-приемника выполнены вдвое меньшим количеством витков по сравнению с другими обмотками синхронизации.Устройство работает в индикаторном режиме. При наличии углового рассогласования ротор сельсина-приемника поворачивается до достижения согласованного положения с валом сельсина- датчика. 1 ил. i (Л с Од ГО со со со
| Хрущев В.В | |||
| Электрические микромашины автоматических устройств | |||
| - Л.: Энергия, 1976, с | |||
| Парный рычажный домкрат | 1919 |
|
SU209A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для дистанционной передачи угловых перемещений | 1985 |
|
SU1314362A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
