мощи оси 6 таким образом, что ось по-20 горизонтальной оси захватные рычаги.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь | 1988 |
|
SU1588689A1 |
| СПАЙДЕР ДВУХКОЛОННЫЙ | 2013 |
|
RU2517107C1 |
| Упорное приспособление для контакта с грузом грузозахватного устройства четырехтактного действия | 1990 |
|
SU1773845A1 |
| Грузозахватное устройство | 1987 |
|
SU1477656A1 |
| МОСТОВОЙ БЛОК МНОГОПРОЛЕТНОГО МОСТА И КАРЕТКА ПРИВОДА (ЕЕ ВАРИАНТЫ) | 1993 |
|
RU2057836C1 |
| Грузозахватное устройство В.К.Петрова | 1980 |
|
SU950654A1 |
| Захватное устройство для длинномерных грузов | 1977 |
|
SU715426A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Захватная балка для маневрирования гидротехническими затворами с выдвижными штангами | 1978 |
|
SU732440A1 |
| Захват-кантователь для грузовцилиНдРичЕСКОй фОРМы | 1979 |
|
SU850544A2 |

Изобр етение относится к подъемно-транспортной технике, в частности к захватным устройствам. Целью изобретения является расширение эксплуатационных возможностей за счет обеспечения работы в стесненных условиях. Захватное устройство содержит захватные рычаги 1 и 4, связанные горизонтальной осью 6, в которой установлен ны штырь 8 и пальцы 7, взаимодействующие с ним и с внутренней боковой поверхностью захватного рычага 1. 2 ил.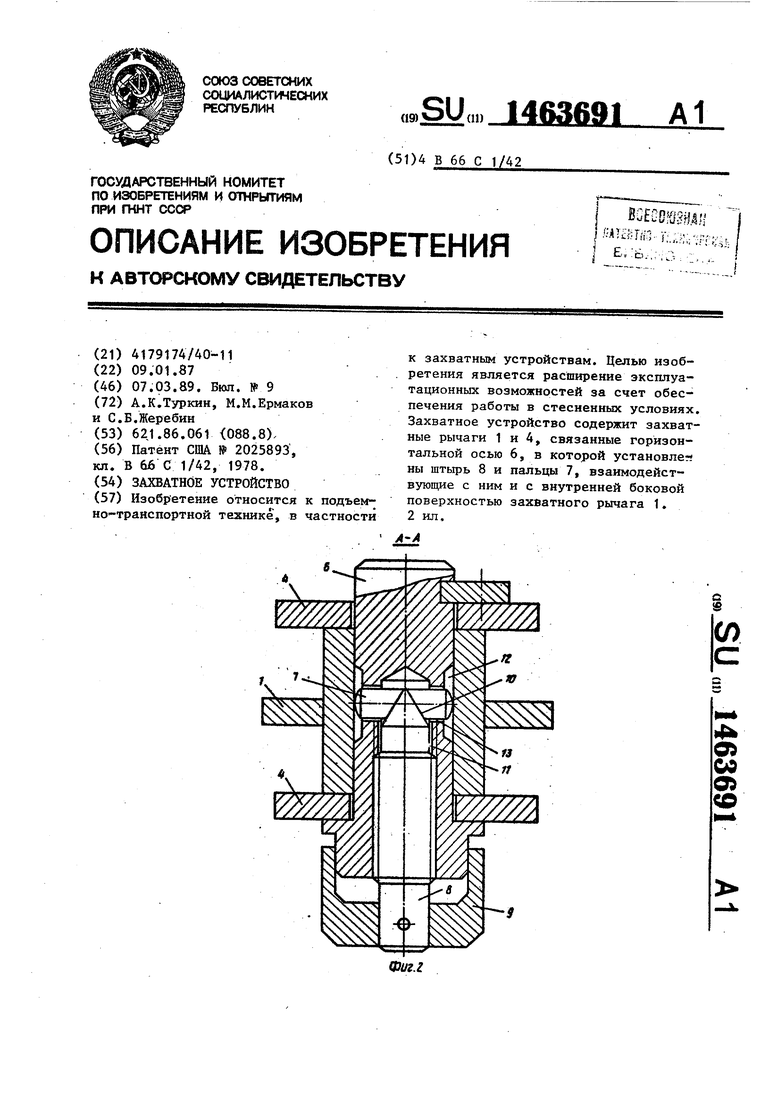
ворота смещена относительно оси симметрии захватного устройства, внутри горизонтальной оси 6 расположен фиксатор положений захватных рычагов, содержапщй радиально установленные пальцы 7 и штырь 8, с резьбой на боковой поверхности, соединенный с рукояткой, со скосами 10. В горизонтальной оси 6 для штыря 8 вьшолнено гнездо 11, сама ось 6 ксмеет выточки 12 и соосные поперечные отверстия 13 для пальцев 7.
Захватное устройство работает следующим образом.
Перед началом работы захватные рычаги 1 и 4 фиксируются в раскрытом положении путем поворота штыря 8 за рукоятку 9 в направлении зажима. При этом штырь 8, входя в контакт с пальцами 7, раздвигает их, расклинивая захватные рычаги 1 и 4, Устройство ориентируют на транспортируемый груз и плавно поворачивают рукоятку 9 в направлении отжима. Пальцы 7 выходят из контакта с рычагом 1. При этом под весом устройства захватный рычаг 1 поворачивается относительно подвески 3, захватный рычаг 4 под своим
5
0
5
0
5
на конце верхнего плеча одного из которых закреплена подвеска для крюка подъемного механизма и фиксатор положения захват.ных рычагов, включающий штырь с рукояткой на одном конце и гнездо для него, отличающееся тем, что, с целью расширения эксплуатационных возможностей за счет обеспечения работы в стесненных условиях, штырь выполнен со скосами на свободном конце и резьбой на боковой поверхности, а гнездо для него выполнено в горизонтальной оси за- хватньпс рычагов продольно ей, при этом упомянутая горизонтальная ось вьтолнена с двумя симметричными относительно гнезда выточками и сопряженными с ними и с гнездом соосными поперечными гнезду отверстиями, а фиксатор полоясения захватных рычагов дополнительно включает установленные в поперечных отверстиях с возможностью расположения в выточках оси и взаимодействия одними концами с внутренней боковой поверхностью первого рычага пальцы, другие концы которых скошены к свободному концу штыря для взаимодействия с его скосами.
Фиг.1
| ИЗМЕРИТЕЛЬНЫЙ УСИЛИТЕЛЬ С РЕГУЛИРУЕМЫМ КОЭФФИЦИЕНТОМ УСИЛЕНИЯ | 1989 |
|
RU2025893C1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
