Изобретение относится к подъемно- транспортному оборудованию, именно к грузозахватным устройствам.
Цель изобретения - расширение эксплуатационных возможностей путем обеспечения автоматического освобождения груза.
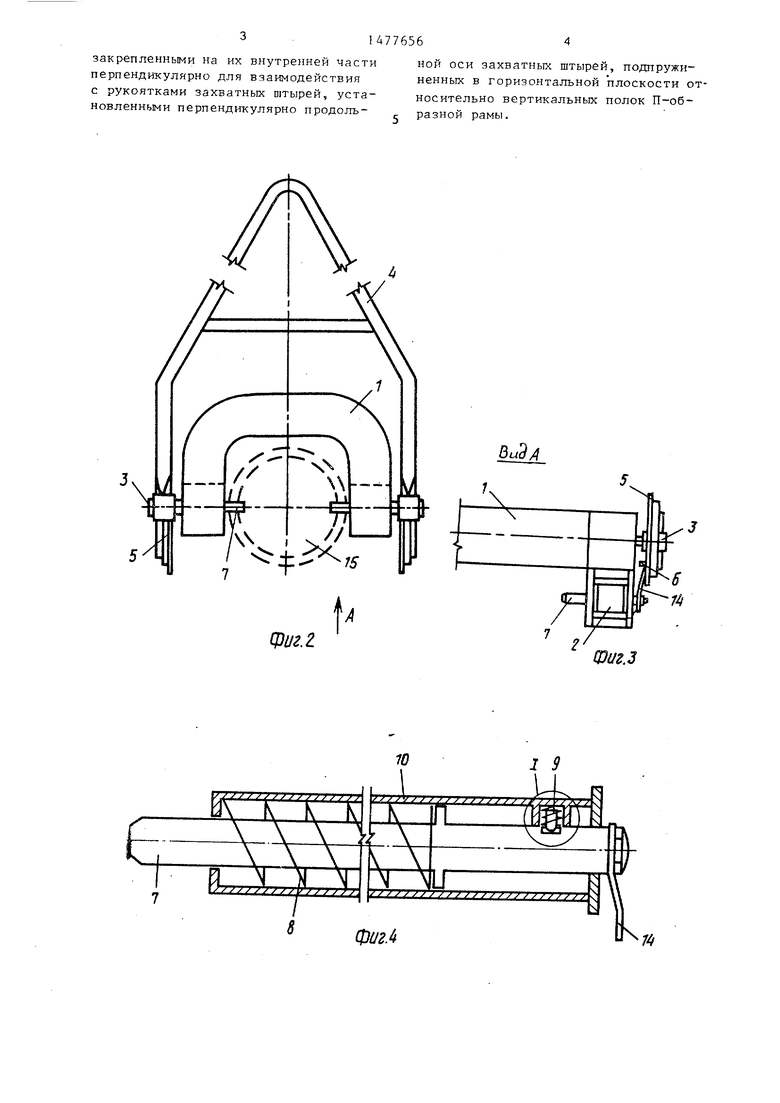
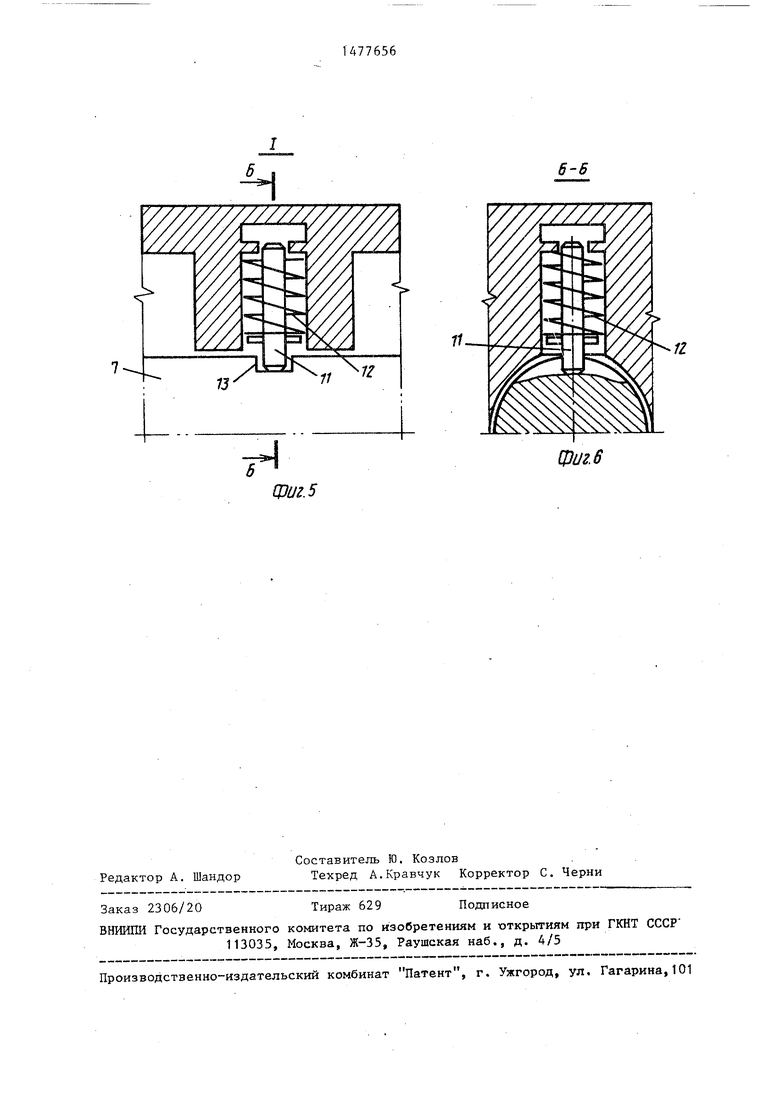
На фиг. 1 показано грузозахватное устройство, общий вид; на фиг. 2 - то же, вид сбоку, на фиг. 3 - вид Л на фиг. 2 на фиг. 4 - захватный штырь, на фиг. 5 - узел Т на фиг. 4,° на фиг. 6 - сечение Б-Б на фиг. 5.
Грузозахватное устройство содержит П-образнута опорную раму 1 с захватными упорами 2, соединенную осями 3 с несущей скобой 4, на концах боковых ветвей которой жестко закреплены упорные секторы 5 с кулачками 6, а верхний конец присоединяется к грузоподъемному механизму. Каждый захватный упор 2 включает в себя горизонтальный захватный штырь 7, подпружиненный пружиной 8, и фиксатор 9 рабочего положения штыря 7, расположенного в корпусе 0, жестко закрепленном на конце вертикальной полки рамы 1„ Фиксатор 9 состоит из пальца 11, подпружиненного пружиной 12, В штыре 7 перпендикулярного продольной оси выполнена по части окружности прорезь 13 для пальца 11 . На внешнем торце штыря 7 перпендикулярно продольной оси закреплена поворотная рукоятка 14.
Грузозахватное устройство работает следующим образом.
Устанавливают раму 1 при освобожденных пружинах 8 на изделие, например спору 15, в положение, при кото- скобы 4 направлен в сторону основания опоры 15, а горизонтальные штыри 7 в захватных упорах 2 находятся против отверстий в опоре 15, Затем ориентируют рукоятки 14 штырей 7 в сторону вершины опоры, причем прорезь 13 в штыре 7 сказывается на одной прямозт с концом пальца i 1 , и преодолевая усилие пружины 8, вручную задвигают штыри 7 в отверстия опоры 15. После задвижки штырей 7 на полный ход автоматически срабатывают фиксаторы 9 и штыри 7 фиксируются в выдвинутом состоянии пальцем 11 , попадающим в прорезь 13 штыря 7 под де вием пружины 12.
Грузоподъемный механизм, например летательны1 аппарат, цепляет устройство за верх поворотной скобы 4 и поднимает опору 15. В начале подъема рама 4 поворачивается вокруг полуосей 3, ас ней поворачиваются секторные упоры 5 с кулачками 6. Одновременно с перекрытием торцов штырей 7 дугами опорных секторов происходит поворот штырей 7 относительно продольной
оси под воздействием кулачков 6 на рукоятки 14, в результате чего пружины 12 сжимаются и пальцы 11 выходят из прорезей 13 штырей 7. Последние под воздействием пружин 8 упираются
5 своими торцами в дуги упорных секторов 5. После установки и закрепления опоры 15 летательный аппарат снижается на определенную высоту, поворотная скоба 4 поворачивается в обрато ном направлении под действием силы собственной тяжести и дуги секторных упоров 5 скользят по внешним торцам штырей 7 « При определенном угле поворота дуги 5 перестают перекрывать
5 торцы штырей 7, и пружины 8 выталкивают их из отверстий опоры 15.
Изобретение обеспечивает автоматическое освобождение захватного
устройства от монтируемого изделия независимо от его высоты, при этом исключается случайное освобождение изделия при ослаблении натяжения грузоподъемных канатов.
Формула изобретения
Грузозахватное устройство, содержащее связанную с подъемной машиной несущую скобу, установленную на концах ее боковых ветвей посредством горизонтальных осей П-образную раму с горизонтальными отверстиями, выполненными на концах ее вертикальных полок, расположенные в горизонтальных отверстиях захватные штыри, на боковой поверхности каждого из которых выполнена поперечная прорезь, а на свободном конце закреплена рукоятка, и подпружиненные в вертикальной плоскости фиксаторы для взаимодействия с прорезями захватных штырей, отличающееся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения
автоматического освобождения груза, оно снабжено жестко закрепленными на концах боковых ветвей несущей скобы и расположенными продольно им упорными секторами с кулачками,
закрепленными на их внутренней части пой оси захватных штырей, подпружи- перпендикулярно для взаимодействия ненных в горизонтальной плоскости от- с рукоятками захватных штырей, уста- носительно вертикальных полок П-об
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1341145A1 |
| Автоматический захват | 1983 |
|
SU1174366A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ИЗДЕЛИЙ, ИМЕЮЩИХ ВНУТРЕННЮЮ ПОЛОСТЬ | 1999 |
|
RU2172715C1 |
| Грузозахватное устройство | 1979 |
|
SU850549A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2614873C1 |
| Захватное устройство для грузов с проушинами | 1990 |
|
SU1787925A1 |
| Силовой тренажер | 1990 |
|
SU1780777A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| УСТРОЙСТВО ПОГРУЗКИ-ВЫГРУЗКИ ГРУЗА НА ПОДВОДНОМ ТЕХНИЧЕСКОМ СРЕДСТВЕ | 2010 |
|
RU2422319C1 |
Изобретение относится к подъемно-транспортной технике, в частности к грузозахватным устройствам. Целью изобретения является повышение удобства эксплуатации. Грузозахватное устройство содержит две пары П-образных рамок, внешних 1 и внутренних 2, концы продольных сторон которых связаны горизонтальными осями. На концах рамок 1 и 2 жестко закреплены зацепы 6 и 7. При захвате трехтонного груза работают зацепы 6, при захвате пятитонного груза - зацепы 7. 2 ил.
новленными перпендикулярно продолъФиг. 2.
8
разнои рамы.
Qu%A
Шиг.з
ю
1 9
Фиг.ь
74
ери г. 5
6-6
фиг. 6
| Захват-кантователь | 1980 |
|
SU889591A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
