1
Изобретение относится к системам автоматического регулирования.
Цель изобретения - повыщение быстродействия устройства за счет более полного использования скоростных врз- можностей привода без введения каких- либо корректир жнцих устройств.
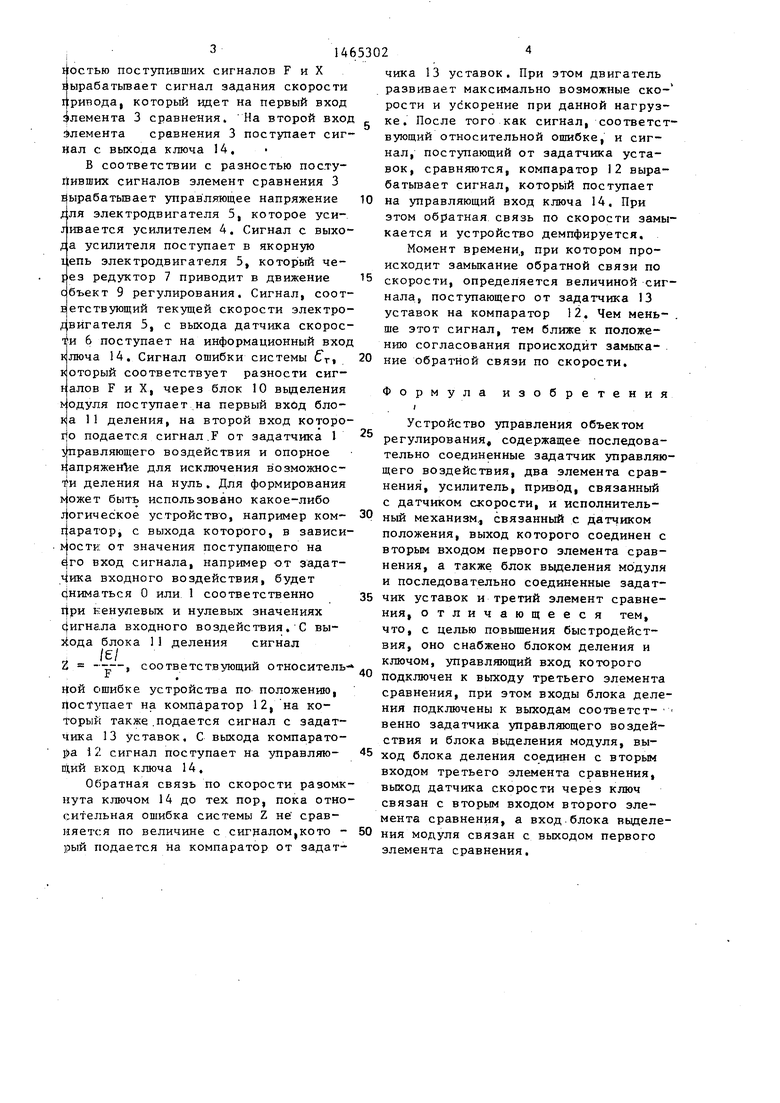
На чертеже изображена блок-схема предлагаемо го ус тройс тв а управления.
Устройство содержит задатчик 1 управляющего воздействия, первый 2 и второй 3 элементы сравнения соответственно по положению и скорости, усилитель 4, привод, состоящий, например,из электродвигателя 5, связанного с датчиком скорости 6, н редуктора 7 , соединенного с исполнительным
механизмом (объектом регулирования) 8j датчик 9 положения, блок 10 выделе- . ния модуля, блок 11 деления, третий элемент 12 сравнения (компаратор), задатчик 13 уставок, ключ 14.
Устройство работает следующим об- ,
с задатчика 1 :1щравляющего воздействия сигнал F, пропорциональный требуемому положению объекта 8 регулирования, поступает на первый вход элемента 2 сравнения по положению. На второй вход элемента 2 сравнения поступает сигнал X от датчика 9 положения, соответствующий текущему положению объекта 8 регулирования. Эле- мент 2 сравнения в соответствии с раз-
О О1
со
itocTbro поступивших сигналов F и X йырабатьшает сигнал задания скорости Привода, который идет на первый вход Элемента 3 сравнения. На второй вход Элемента сравнения 3 поступает сиг- Нал с выхода ключа 14,
В соответствии с разностью поступивших сигналов элемент сравнения 3 : ырабатьшает управляющее напряжение ;ля электродвигателя 5, которое уси- 1ивается усилителем 4. Сигнал с выхода усилителя поступает в якорную 1,епь электродвигателя 5, котор ый через редуктор 7 приводит в движение объект 9 регулирования. Сигнал, соответствующий текущей скорости электродвигателя 5, с выхода датчика скорос- 6 поступает на информационный вход к}люча 14. Сигнал ошибки системы б г, который соответствует разности сиг- тралов F и X, через блок 10 выделения модуля поступает на первый вхйд блока 11 деления, на второй вход которо- г|о подается сигнал. от задатчика 1 управляющего воздействия и опорное ЦапркжеуЛ е для исключения возможнос- деления на нуль , Для формирования |ожет быть использовано какое-либо Логическое устройство, например ком- г аратор, с выхода которого, в зависи- от значения поступающего на го вход сигнала, например от задат- входного воздействия, будет униматься О или 1 соответственно 1|ри ненулевых и нулевых значениях с|игна.ла входного воздействия. С вы- з|ода блока 1 1 деления сигнал
Z -- -, соответствующий относительНой ошибке устройства по положению, Поступает на компаратор 12, на который также.подается сигнал с задатчика 13 уставок. С выхода компарато- а 12 сигнал поступает на управляю- п1ий вход ключа 14,
Обратная связь по скорости разомкнута ключом 14 до тех пор, пока относительная ошибка системы Z не сравняется по величине с сигналом,кото - рый подается на компаратор от задат
чика 13 уставок. При этом двигатель развивает максимально возможные ско- рости и ускорение при данной нагрузке. После того как сигнал, соответствующий относительной ошибке, и сигнал, поступающий от задатчика уставок, сравняются, компаратор 12 выра- батьшает сигнал, которьгй поступает
на управляющий вход ключа 14, При
этом обратная связь по скорости замыкается и устройство демпфируется.
Момент времени., при котором происходит замыкание обратной связи по скорости, определяется величиной сигнала, поступающего от задатчика 13 уставок на компаратор 12, Чем мень- ще этот сигнал, тем ближе к положению согласования происходит замыка- . ние обратной связи по скорости,
Формула изобретения
I
Устройство управления объектом регулирования, содержащее последовательно соединенные задатчик управляющего воздействия, два элемента сравнения, усилитель, привод, связанный с датчиком скорости, и исполнительный механизм., связанный с датчиком положения, выход которого соединен с вторым входом первого элемента сравнения, а также блок вьщеления модуля и последовательно соединенные задатчик уставок и третий элемент сравнения, отличающееся тем, что, с целью повьш1ения быстродействия, оно снабжено блоком деления и ключом, управляющий вход которого
подключен к выходу третьего элемента сравнения, при этом входы блока деления подключены к выходам соответст- венно задатчика управляющего воздействия и блока выделения модуля, выход блока деления соединен с вторым входом третьего элемента сравнения, выход датчика скорости через ключ связан с вторым входом второго элемента сравнения, а вход.блока выделения модуля связан с выходом первого элемента сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система регулирования скорости | 1987 |
|
SU1462243A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| Система регулирования скорости | 1983 |
|
SU1092465A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Система автоматического регулирования | 1981 |
|
SU1029135A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Многоканальное устройство для управления гальванообработкой | 1988 |
|
SU1532948A2 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Система управления | 1988 |
|
SU1575151A1 |
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
Изобретение относится к системам ав томатического регулирования. Целью изобретения является повышение быстродействия устройства. Для этого устройство, содержащее последова- тельно соединенные задатчик управляющего воздействия, элементы сравнения по положению и скорости, усилитель, привод, исполнительный механизм, датчик положения и скорости, задатчик уставок, блок вьвделения модуля, дополнительно снабжено блоком деления и ключом, через который датчик скорости связан с соответствующим элементом сравнения. При больших сигналах рассогласования по положению обратная связь по скорости разомкнута, что позволяет максимально использовать скоростные возможности привод, а при подходе исполнительного механизма к согласованному положению осуществляется замыкание обратной связи по скорости и работа устройства осуществляется в обычном порядке. 1 ил. (g
| Авторское свидетельство СССР ,№ 1229719, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
