Фиг.1
Изобретение относится к автомати- ческому регулированию и может быть использовано для следящих и позиционных систем управления.
Цель изобретения - повышение быст- родейсгвия и устойчивости системы управления.
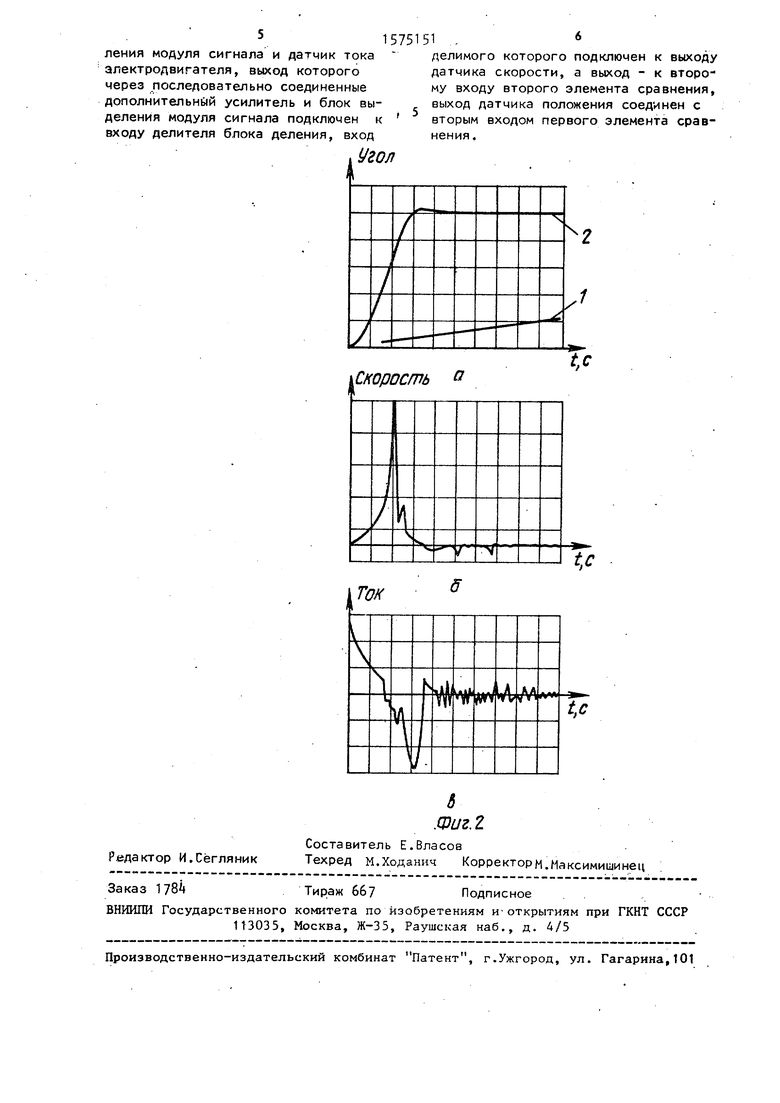
На фиг. 1 представлена блок-схема предлагаемой системы управления, На фиг. 2 а - переходные процессы на валу нагрузки при подаче на системы скачкообразного входного воз- Действия: 1 - без блока деления в скоростном контуре; 2 - с блоком деления в скоростном контуре,-на фиг. 2 б - переходной процесс в цепи обратной связи по скорости при наличии блока деления} на фиг. 2 в - график изменения тока в якорной цепи электродвигателя.
Система содержит задатчик управ- Ъяющего воздействия 1, элементы срав- нения 2 и 3, усилитель k, электродвигатель 5, датчик скорости 6, редуктор 7 объект регулирования 8, датчик Положения 9, датчик тока электродвигателя 10, дополнительный усилитель 11, блок выделения модуля сигнала 12, блок деления 13.
Система работает следующим образом С зедатчика управляющего воздействия 1 сигнал, пропорциональный требуемому положению объекта регулирования 8, поступает на первый вход элемента .сравнения по положению 2. На второй вход элемента сравнения 2 поступает сигнал от датчика положения 9, соответствующий текущему положению объекта регулирования 8. Элемент сравнения 2 вырабатывает сигнал задания скорости электродвигателя 5, который идет на первый вход элемента соавне- ния по скорости 3. На второй вход элемента сравнения 3 поступает сигнаг с выхода блока деления 13. 8 соответствии с разностью поступивших сигналов элемент сравнения 3 вырабатывает управляющее напряжение для электродвигателя 5 которое усиливается усилителем А„ Сигнал с выхода усилителя поступает в якорную цепь электродвигателя 5, который через редуктор 7 приводит в действие объект регулирования 8. Сигнал, соответствующий текущей скорости электродвигателя 5 через датчик скорости 6 поступает-на первый вход блока деления 13. На второй вход блока деления
13 поступает сигнал с выхода блока выделения модуля сигнала 12 и опорное напряжение иэл для исключения возможности деления на нуль. На блок выделения модуля сигнала 12 через дополнительный усилитель 11 и датчик, тока 10 поступает сигнал из якорной цепи электродвигателя 5 пропорциональный току электродвигателя. Ток в якорной цепи электродвигателя пропорционален развиваемому им ускорению. Как видно из графика, обозначенного цифрой 2 на фиг. 2а и графика
5 на фиг. 2в, ток в якорной цепи электродвигателя достигает максимума, когда система находится далеко от положения согласования, и затем, по мере приближения объекта регулирова0 кия к положению согласования ток стремится к нулю. Используя модуль предварительно усиленного сигнала по току в качестве делителя, на участке времени, когда объект регули5 рования находится далеко от положения согласования, практически размыкается обратная связь по скорости. При этом двигатель развивает макси- ;мально возможные скорость и ускоре0 ние при данной нагрузке. Затем, по мере приближения к положению согласования, ток в якорной цепи двигателя стремится к нулю и если U оп 1, то коэффициент.обратной связи по скорос,. ти становится равным коэффициенту передачи датчика скорости 6, который достаточно большой (как правило сотые) и система резко демпфируется.
д Формула изобретения
Система управления, содержащая блок деления, опорный вход которого соединен с входом опорного напряжения системы, задатчик управляющего
с воздействия, выход которого подключен к первому входу первого элемента сравнения, выход которого соединен с - первым входом второго элемента сравнения, подключенного выходом через последовательно соединенный усилитель
к входу электродвигателя, содержащего датчик скорости, выход электродвигателя через редуктор кинематически соединен с объектом регулирования, снабженным датчиком положения, о т 5
л и ч а ю щ а я с я тем, что, с целью повышения быстродействия и устойчивости системы, в нее введены дополнительный усилитель, блок выдеУгол
К,
Скорость а
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления объектом регулирования | 1987 |
|
SU1465302A1 |
| Система управления | 1985 |
|
SU1285427A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ПЛОСКОЙ ЗАГОТОВКИ ПРИ ИНДУКЦИОННОМ НАГРЕВЕ | 1991 |
|
RU2032996C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ПРИ ИНДУКЦИОННОМ НАГРЕВЕ | 1992 |
|
RU2076465C1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU302444A1 |
| Устройство для управления возбуждением электродвигателя постоянного тока | 1978 |
|
SU782113A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
Изобретение относится к технике автоматического регулирования и может быть использовано для следящих и позиционных систем управления. Цель изобретения - повышение быстродействия и устойчивости системы. В системе внутренняя скоростная обратная связь при больших рассогласованиях практически размыкается, а при подходе к положению согласования коэффициент обратной связи по скорости резко возрастает. Устройство содержит задатчик 1 управляющего воздействия, элементы сравнения 2 и 3 положению и скорости, усилитель 4, электродвигатель 5, датчик скорости 6, редуктор 7, объект регулирования 8, датчик положения 9, датчик тока 10, дополнительный усилитель 11, блок 12 выделения модуля сигнала, блок деления 13. Система позволяет полностью использовать скоростные возможности электродвигателя. 2 ил.
/
,с
5
ЛчМ
t,c
| Следящая система | 1981 |
|
SU968783A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1983 |
|
SU1142811A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
