w
Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1987 |
|
SU1466934A1 |
| Модуль манипулятора | 1991 |
|
SU1798177A1 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Манипулятор | 1982 |
|
SU1009754A1 |
| Модуль робота | 1990 |
|
SU1722809A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Автоматический манипулятор с цикловым управлением | 1983 |
|
SU1151449A2 |
| Модуль вертикального перемещения | 1986 |
|
SU1386444A1 |
Использование: в манипуляторостроении, в частности в качестве исполнительного модуля промышленного робота с цикловым управлением. В конструкции модуля имеется дополнительный силовой привод 8, который установлен на основании и связан с подвижным звеном 2. Упор 9, а также упор 10 упругого элемента аккумулятора механической энергии и одна из частей управляемого фиксатора положения расположены в едином корпусе 11, установленном с возможностью его перемещения выходным элементом дополнительного привода по направляющим. 6 з. п. ф-лы, 3 ил.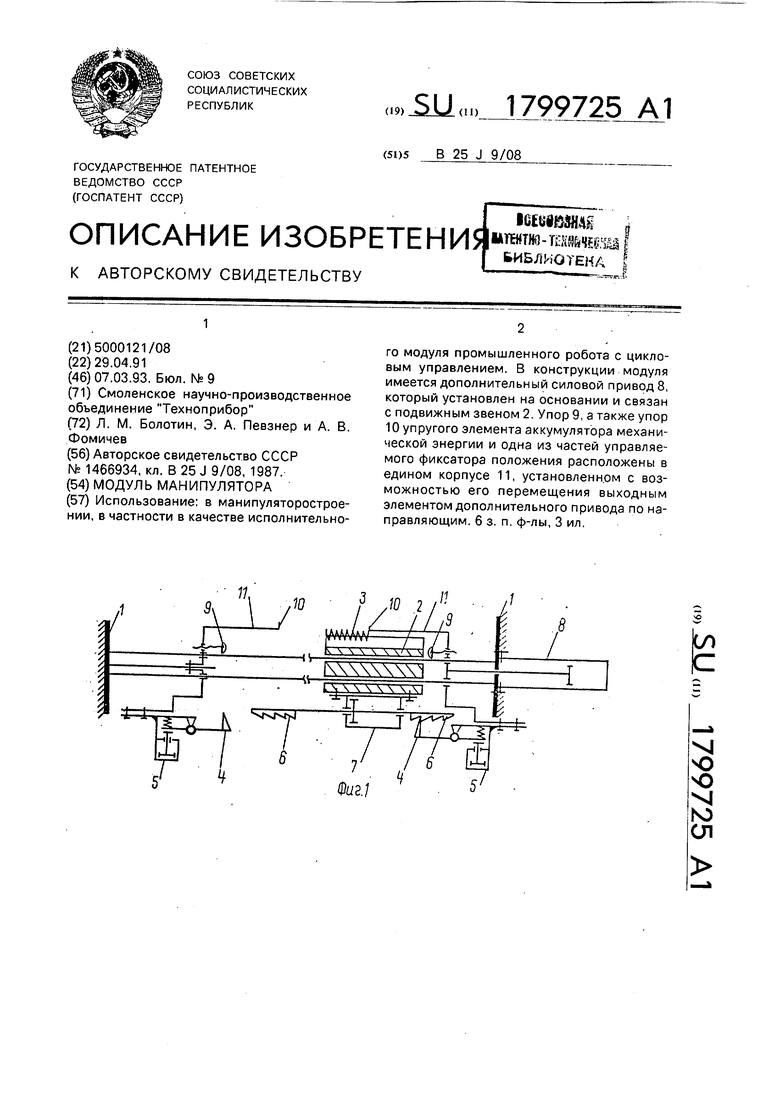
VJ
ю о VI ю ел
Изобретение относится к области машиностроения, конкретнее, к манипулято- ростроению, может быть использовано в качестве исполнительного модуля промышленного робота (ПР) с цикловым управлением и является усовершенствованием модуля манипулятора по основному а. с. № 1466934 B25J 9/08, Б. И. № 11, 1989 г.
Цель изобретения - расширение функциональных (технологических) возможностей модуля манипулятора по а. с. 1466934 путем увеличения точек позиционирования.
Эта цель достигается тем, что модуль манипулятора по а. с. 1466934 снабжен установленным соосно направлению перемещения звена модуля дополнительным силовым приводом, с выходным подвижным элементом которого соединены упор точек позиционирования подвижного звена модуля, упор упругого элемента аккумулятора механической энергии и одна из частей управляемого фиксатора положения.
Конструктивно модуль манипулятора может быть выполнен так, что дополнительный силовой привод установлен на основании или на подвижном звене модуля. Кроме того, упор точки позиционирования, упор упругого элемента аккумулятора механической энергии и одна из частей управляемого фиксатора положения выполнены в едином корпусе, установленном с возможностью перемещения дополнительным приводом по направляющим модуля. Для повышения надежности аккумулятор механической энергии выполнен в виде двух упругих элементов. С этой же целью одну из частей механизма управляемого фиксатора целесообразно выполнить в виде цилиндра с кольцевыми проточками, а другую - в виде двух собачек с приводом их перемещения, расположенных по обе стороны цилиндра с кольцевыми проточками. Кроме того, для получения информации о факте фиксации модуль манипулятора может быть снабжен датчиком положения одной части управляемого фиксатора относительно другой в состоянии фиксации (или положения подвижного звена модуля относительно корпуса механизма фиксатора).
Такое техническое решение, по сравнению с известным по а, с. 1466934, позволит обеспечить односторонний подход подвижного звена к крайним и промежуточным точкам позиционирования и повысить надежность работы модуля в целом.
Выполнение же аккумулятора механической энергии в виде двух упругих элементов позволит, с одной стороны уменьшить требования к циклопрочности упругих элементов модуля, а с другой - позволяет эффективно функционировать модулю при негоризонтальном направлении перемещения подвижного звена.
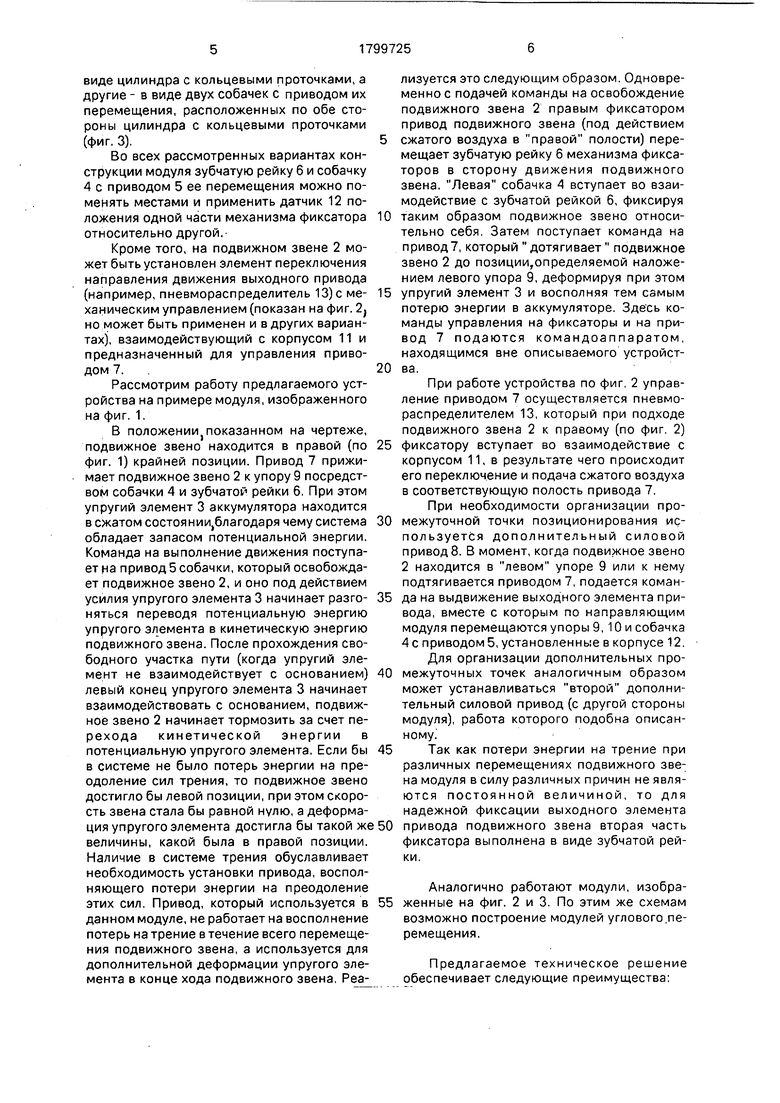
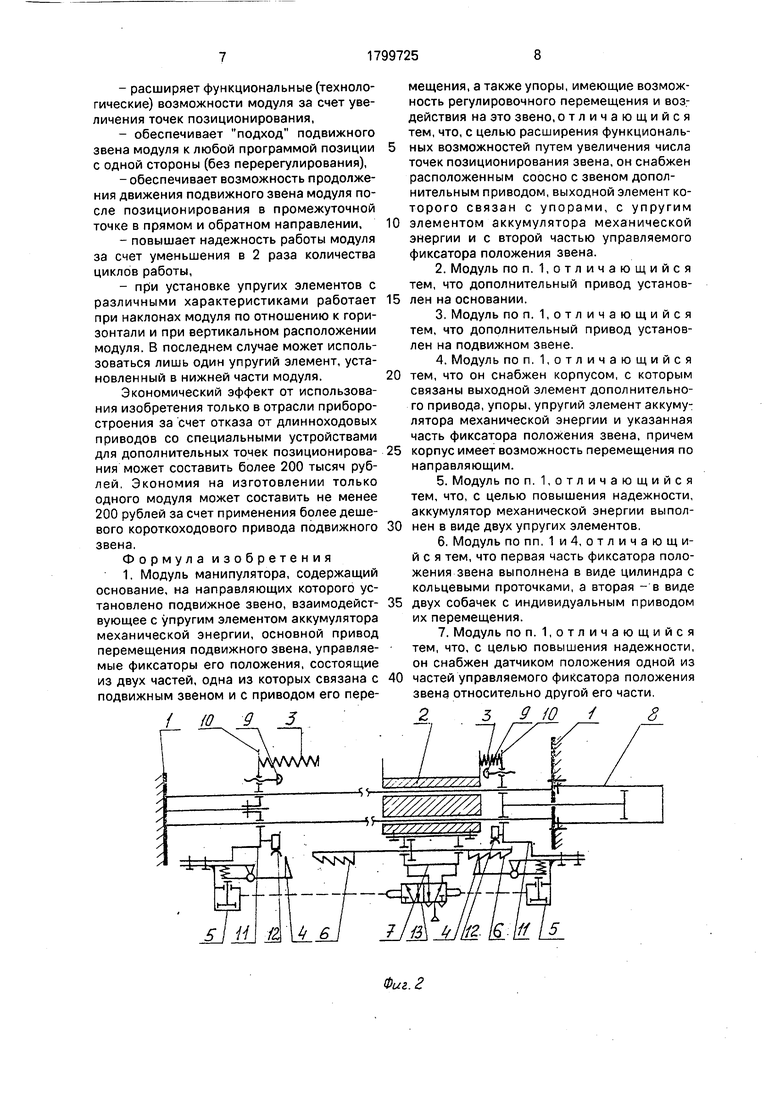
На фиг. 1 изображена конструкция модуля с дополнительным приводом, установ- ленным на основании; на фиг. 2 - конструкция модуля с аккумулятором механической энергии, выполненным в виде двух упругих элементов; на фиг. 3 - конст0 рукция модуля с усовершенствованным механизмом управляемого фиксатора.
Модуль манипулятора (фиг. 1) содержит основание 1, подвижное звено 2, взаимодействующее с упругим элементом 3 акку5 мулятора механической энергии и управляемый фиксатор, состоящий из двух частей, одна из которых, например, содержит подвижную собачку 4 с приводом 5 ее перемещения, а вторая - выполнена в виде
0 зубчатой рейки 6, связанной с выходным элементом привода 7 подвижного звена.
Кроме этого, в дополнении к конструкции модуля манипулятора по а. с. 1466934, предлагаемый модуль снабжен установлен5 ным соосно направлению перемещения подвижного звена 2 модуля дополнительным силовым приводом 8 (силовой цилиндр с выходным подвижным элементом которого соединены упор 9 точек позиционирования
0 подвижного звена 2 модуля, упор 10 упругого элемента 3 аккумулятора механической энергии и одна из частей управляемого фиксатора положения (например, собачка 4 с приводом 5).
5 Конструктивно дополнительный силовой привод может быть установлен как на основании 1, так и на подвижном звене 2 модуля. Силовой привод может быть выполнен, например, на базе рычажного пнев0 моцилйндра, следящего пневмопривода или шагового привода и т. п. Бывает удобным упор 9 точки позиционирования, упор 10 упругого элемента 3 аккумулятора механической энергии и одну из частей управля5 емого фиксатора положения разместить в едином корпусе 11, установленном с возможностью перемещения дополнительным приводом по направляющим модуля.
На фиг. 2 показан модуль манипулято0 ра, аналогичный рассмотренному, но отличающийся тем, что аккумулятор механической энергии выполнен в виде двух упругих элементов 3. Кроме этого, на этом же рисунке показано, что модуль мо5 жет быть снабжен датчиком положения 12 зубчатой рейки 6 относительно собачки 4 в состоянии фиксации (или, что практически тоже самое, относительно корпуса 11).
Конструктивно возможно одну из частей управляемого фиксатора выполнить в
виде цилиндра с кольцевыми проточками, а другие - в виде двух собачек с приводом их перемещения, расположенных по обе стороны цилиндра с кольцевыми проточками (фиг. 3).
Во всех рассмотренных вариантах конструкции модуля зубчатую рейку 6 и собачку 4 с приводом 5 ее перемещения можно поменять местами и применить датчик 12 положения одной части механизма фиксатора относительно другой.Кроме того, на подвижном звене 2 может быть установлен элемент переключения направления движения выходного привода (например, пневмораспределитель 13) с ме- ханическим управлением (показан на фиг. 2} но может быть применен и в других вариантах), взаимодействующий с корпусом 11 и предназначенный для управления приводом 7. .
Рассмотрим работу предлагаемого устройства на примере модуля, изображенного на фиг. 1.
В положенииj показанном на чертеже, подвижное звено находится в правой (по фиг. 1) крайней позиции. Привод 7 прижимает подвижное звено 2 к упору 9 посредством собачки 4 и зубчатой рейки 6. При этом упругий элемент 3 аккумулятора находится в сжатом состоянии,благодаря чему система обладает запасом потенциальной энергии. Команда на выполнение движения поступает на привод 5 собачки, который освобождает подвижное звено 2, и оно под действием усилия упругого элемента 3 начинает разго- няться переводя потенциальную энергию упругого элемента в кинетическую энергию подвижного звена. После прохождения свободного участка пути (когда упругий элемент не взаимодействует с основанием) левый конец упругого элемента 3 начинает взаимодействовать с основанием, подвижное звено 2 начинает тормозить за счет перехода кинетической энергии в потенциальную упругого элемента. Если бы в системе не было потерь энергии на преодоление сил трения, то подвижное звено достигло бы левой позиции, при этом скорость звена стала бы равной нулю, а деформация упругого элемента достигла бы такой же величины, какой была в правой позиции. Наличие в системе трения обуславливает необходимость установки привода, восполняющего потери энергии на преодоление этих сил. Привод, который используется в данном модуле, не работает на восполнение потерь на трение в течение всего перемещения подвижного звена, а используется для дополнительной деформации упругого элемента в конце хода подвижного звена. Реализуется это следующим образом. Одновременно с подачей команды на освобождение подвижного звена 2 правым фиксатором привод подвижного звена (под действием сжатого воздуха в правой полости) перемещает зубчатую рейку 6 механизма фиксаторов в сторону движения подвижного звена. Левая собачка 4 вступает во взаимодействие с зубчатой рейкой 6, фиксируя таким образом подвижное звено относительно себя. Затем поступает команда на привод, который дотягивает подвижное звено 2 до позиции,определяемой наложением левого упора 9, деформируя при этом упругий элемент 3 и восполняя тем самым потерю энергии в аккумуляторе. Здесь команды управления на фиксаторы и на привод 7 подаются командоаппаратом, находящимся вне описываемого устройства.
При работе устройства по фиг. 2 управление приводом 7 осуществляется пневмо- распределителем 13, который при подходе подвижного звена 2 к правому (по фиг. 2) фиксатору вступает во взаимодействие с корпусом 11, в результате чего происходит его переключение и подача сжатого воздуха в соответствующую полость привода 7.
При необходимости организации промежуточной точки позиционирования используется дополнительный силовой приводЗ. В момент, когда подвижное звено 2 находится в левом упоре 9 или к нему подтягивается приводом 7, подается команда на выдвижение выходного элемента привода, вместе с которым по направляющим модуля перемещаются упоры 9,10 и собачка 4 с приводом 5, установленные в корпусе 12.
Для организации дополнительных промежуточных точек аналогичным образом может устанавливаться второй дополнительный силовой привод (с другой стороны модуля), работа которого подобна описанному.
Так как потери энергии на трение при различных перемещениях подвижного звена модуля в силу различных причин не являются постоянной величиной, то для надежной фиксации выходного элемента привода подвижного звена вторая часть фиксатора выполнена в виде зубчатой рейки.
Аналогично работают модули, изображенные на фиг. 2 и 3. По этим же схемам возможно построение модулей углового .перемещения.
Предлагаемое техническое решение обеспечивает следующие преимущества:
- расширяет функциональные (технологические) возможности модуля за счет увеличения точек позиционирования,
- обеспечивает подход подвижного звена модуля к любой программой позиции с одной стороны (без перерегулирования),
- обеспечивает возможность продолжения движения подвижного звена модуля после позиционирования в промежуточной точке в прямом и обратном направлении,
- повышает надежность работы модуля за счет уменьшения в 2 раза количества циклов работы,
- при установке упругих элементов с различными характеристиками работает при наклонах модуля по отношению к горизонтали и при вертикальном расположении модуля. В последнем случае может использоваться лишь один упругий элемент, установленный в нижней части модуля.
Экономический эффект от использования изобретения только в отрасли приборостроения за счет отказа от длинноходовых приводов со специальными устройствами для дополнительных точек позиционирования может составить более 200 тысяч рублей. Экономия на изготовлении только одного модуля может составить не менее 200 рублей за счет применения более дешевого короткоходового привода подвижного звена.
Формула изобретения
элементом аккумулятора механической энергии и с второй частью управляемого фиксатора положения звена.
тем, что, с целью повышения надежности,
он снабжен датчиком положения одной из
частей управляемого фиксатора положения
звена относительно другой его части.
Фиг. г
| Модуль манипулятора | 1987 |
|
SU1466934A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
