15
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления ковша одноковшового экскаватора | 1988 |
|
SU1659601A1 |
| Гидравлический экскаватор для образования траншей под защитой тиксотропного раствора | 1987 |
|
SU1461841A1 |
| Скрепер | 1987 |
|
SU1463879A1 |
| Система управления двигателем землеройной гидрофицированной машины | 1986 |
|
SU1451227A1 |
| Скрепер | 1985 |
|
SU1305264A1 |
| Ковш скрепера | 1990 |
|
SU1756600A1 |
| Скрепер с газовой смазкой ковша | 1986 |
|
SU1481336A1 |
| Рабочее оборудование скрепера | 1989 |
|
SU1666652A1 |
| Рабочее оборудование землеройной машины | 1987 |
|
SU1479581A1 |
| СКРЕПЕР С ГАЗОВОЙ СМАЗКОЙ КОВША | 2018 |
|
RU2709572C1 |
Изобретение относится к землеройной технике и повышает надежность рабочего оборудования путем предохранения механизмов выталкивающего устройства от взаимодействия с грунтом. Механизм разгрузки ковша рабочего оборудования состоит из выталкивающего устройства с приводом линий 5 и 6 высокого и низкого давлений, распределителя 8, упора 9 и установленного в линии 5 высокого давления запорного пневмоэлемента 18. Механический орган 7 управления распределителя 8 выполнен с возможностью взаимодействия с упором 9. Выталкивающее устройство состоит из гибкой оболочки /ГО/ 10 и упругих связей 11. К корпусу 2 и боковым стенкам 3 ковша по периметру его кромок ГО 10 прикреплена жестко. К другим частям ковша ГО 10 прикреплена упругими связями 11. Корпус 2, боковые стенки и ГО 10 образуют замкнутую полость /ЗП/ 12. Привод выталкивающего механизма выполнен из пневмопереключателя /ПП/ 13 с камерой управления 17, ресивера 15 и регулируемого дросселя 14. Последний подключен к ресиверу 15 и /ПП/ 13. При переключении ПП 13 имеется возможность сообщения ЗП 12 с линиями высокого 5 или низкого 6 давления. Камера управления 17 подключена к ресиверу 15. Упор 9 размещен на штоке гидроцилиндра 4 поворота ковша. Ресивер 15 выполнен с возможностью регулирования его объема. При разгрузке ковша упор 9 воздействует на орган 7 управления распределителя 8. Сжатый воздух поступает в ЗП 12 и камеру управления 17. По достижении заданной величины давления ПП 13 переключается и ЗП 12 опорожняется. Процесс сопровождается отходом ГО 10 от корпуса 2 и боковых стенок 3 ковшаи возвратом ГО 10 в исходное положение. Периодические колебания ГО 10 позволяют осуществлять принудительную разгрузку ковша. При этом исключаются возможность взаимодействия грунта с механизмами выталкивающего устройства и их заклинивание. 2 з.п. ф-лы, 1 ил.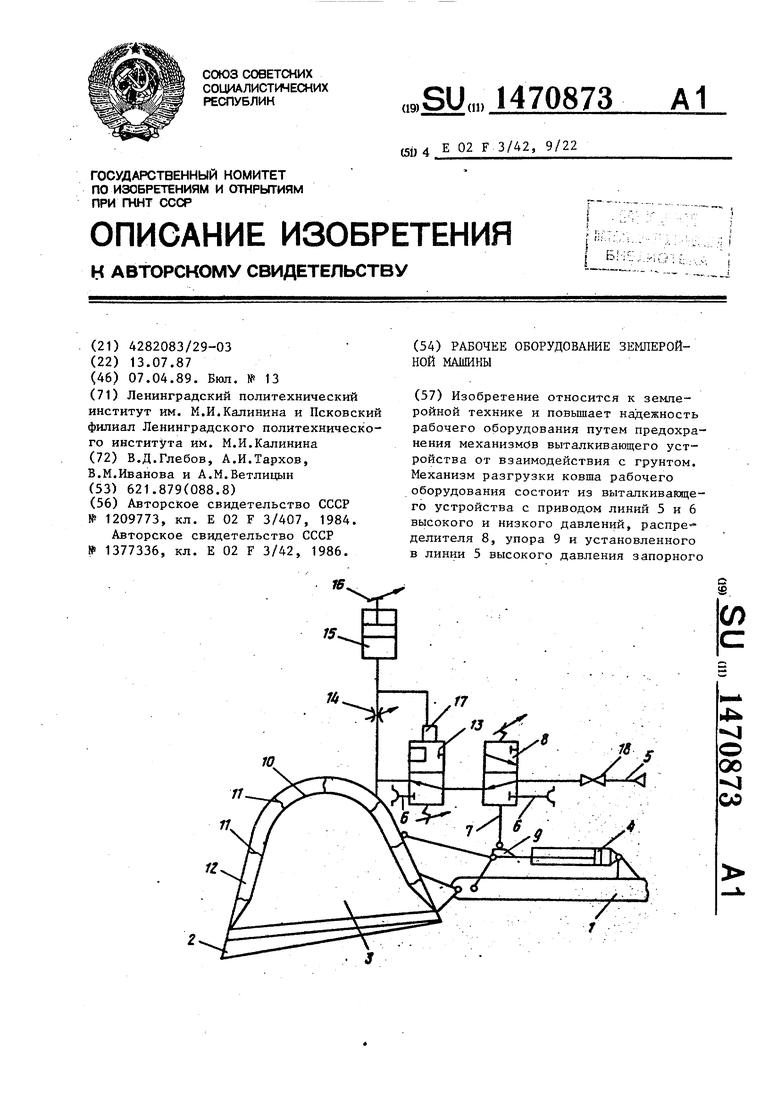
1U
114;:
о оо |
со
пневмоэлемента 18. Механический орган 7 управления распределителя 8 выполнен с возможностью взаимодействия с упором 9. Выталкивающее устройство состоит из гибкой оболочки (ГО) 10 и упругих связей 11, К корпусу 2 и боковым стенкам 3 ковша по периметру его кромок ГО 10 прикреплена жестко. К другим частям ковша ГО 10 прикреплена упругими связями 11. Корпус 2, боковые стенки и ГО 10 образуют замкнутую полость (ЗП) 12. Привод выталкивающего механизма выполнен из пнев- мопереключателя (ПП) 13 с камерой управления 17, ресивера 15 и регулируемого дросселя 14. Последний подключен к ресиверу 15 и ПП 13. При переключении ЦП 13 имеется возможность сооб- щения ЗП 12 с линиями высокого или низкого 6 давления. Камера управле1
Изобретение относится к землеройной технике, в частности к рабочему оборудованию экскаваторов.
Целью изобретения является повьше- ние надежности рабочего оборудования путем предохранения механизмов, выталкивающего устройства от взаимодействия с грунтом.
На чертеже изображено оборудование землеройной машины.
Рабочее оборудование землеройной машины содержит рукоять 1, ковш с корпусом 2 и боковыми стенками 3, гидроцилиндр 4 поворота ковша и ме- ханизм разгрузки ковша. Механизм раз- трузки ковша включает выталкивающее устройство с приводом, линии высокого 5 и низкого 6 давления, имеющий орган 7 управления, распределитель 8, подключенный к линиям высокого 5 и низкого 6 давления и приводу выталкивающего устройства, и упор 9, выполненный с возможностью взаимодействия с органом 7 управления, выполненным механическим. Выталкивающее устройство состоит из гибкой оболочки 10, прикрепленной герметично и жестко по периметру кромок корпуса 2 и боковых стенок 3 ковша, а в других час- тях корпуса и стенок прикрепленной
ния 17 подключена к ресиверу 15. Упор 9 размещен на штоке гидроцилиндра 4 поворота ковша. Ресивер 15 выполнен с возможностью регулирования его объема. При разгрузке ковша упор 9 воздействует на орган 7 управления рас- пределителя 8. Сжатый воздух поступает в ЗП 12 и камеру управления 17. По достижении заданной величины давления ПП 13 переключается и ЗП 12 опорожняется. Процесс сопровождается отходом ГО 10 от корпуса 2 и боковых стенок 3 ковша и возвратом ГО 10 в исходное положение. Периодические Колебания ГО 10 позволяют осуществлять принудительную разгрузку ковша. При этом исключаются возможность взаг имодействия грунта с механизмами выталкивающего устройства и их заклинивание. 2 з.п. ф-лы, 1 ил.
посредством упругих связей 11. Замкнутые полости 12, образуемые с одной стороны гибкой оболочкой 10, ас другой стороны - корпусом 2 и боковыми стенками 3, сообщены с приводом выталкивающего устройства, выполненным из двухпозиционного управляемого пнев мопереключателя 13, через регулируемый дроссель 14 сообщенного с ресивером 15, выполненным с возможностью регулирования его объема посредством поршня с винтом 16, а также с камерой управления 17 пневмопереключате- ля 13. Последний сообщен с линией 6 низкого давления и распределителем 8, который сообщен с линией 6 низкого давления и через запорный пневмоэле- мент 18 линией 5 высокого давления. Распределитель 8 закреплен на корпусе .гидроцилиндра 4 привода ковша таким образом, что его золотник в положении разгрузки ковша взаимодействует со скошенным упором 9, установленным на конце штока гидроцилиндра 4.
В линии 5 установлен запорный пневмозлемент 18.
Рабочее оборудование действует следующим образом.
В положении разгрузки ковша упор 9 удерживает золотник распределителя 8
3147
в изоб|)аженной на чертеже позиции, при которой сжатый воздух от линии 5 высокого давления поступает через запорный пневмоэлемент 18, распределитель 8 и пневмопереключатель 13 в замкнутые полости 12 ковша. В указанных полостях 12 повьшается давление газа и гибкая оболочка 10 отжимается от внутренней поверхности ковша, образуя зазор, величина которого определяется упругими связями 11. Одновременно происходит увеличение давления в ресивере 15 и в камере 17 у-п- равления пневмопереключателя 13. При достижении заданной величины, давления золотник пневмопереключателя преодолевает усилие пружины и опускается вниз, соединяя полости 12 ковша с линией 6 низкого давления и окружающей средой. Гибкая оболочка 10 под действием гибких связей 11 прижимается к внутренней поверхности ковша. Через некоторое время, величина которого определяется емкостью ресивера 15 и характеристикой дросселя 14, уменьшается давление и в камере 17 управления, поэтому золотник пневмопереключателя 13 поднимается пружи- ной вверх в исходную позицию, сообщая полости 12 с линией 5 высокого давления. Повторяющиеся переключения золотника пневмопереключателя 13 обуславливают непрерывные колебания гибкой оболочки 10, что и обеспечивает отделение от нее грунта и эффективную разгрузку ковша. Б соответствии с эксплуатационными условиями
Формула изобретени 1. Рабочее оборудование землерой ной машины, содержащее рукоять, ков с корпусом и боковыми стенками, гид роцилиндр поворота ковша и механизм разгрузки ковша, включающий выталки вающее устройство с приводом, линии высокого и низкого давления, имеющи орган управления распределитель, по ключенный к линиям высокого и низко давления и приводу выталкиваю1чего устройства, и упор, выполненный с возможностью взаимодействия с орган управления распределителем, отли чающееся тем, что, с целью повышения надежности рабочего обору дования путем предохранения механиз мов выталкивающего устройства от вз имодействия с грунтом, выталкивающе устройство выполнено из гибкой обо.- лочки, прикрепленной жестко к корпу су и боковым стенкам ковша по периметру его кромок и посредством упру гих связей в других частях ковша, а привод выталкивающего устройства вы полнен из имеющего камеру управлени пневмопереключателя, ресивера и рег лируемого дросселя, подключенного к ресиверу и пневмопереключателю, кот рый подключен к замкнутой полости, образованной корпусом ковша, erq бо ковыми стенками и гибкой оболочкой, с возможностью сообщения замкнутой полости в одной из позиций его золот
ки 10, такие как частота и интенсивность, посредством изменения емкости ресивера 15 с помощью винта 16, регу(вид и состояние грунта) регулируются параметры колебаний гибкой оболоч- . ника с линией высокого давления, а
в другой позиции золотника с линией низкого давления, при этом камера .управления пневмопереключателя под- лирования дросселя 14 и упругости пружины пневмопереключателя 13. .,
После разгрузки ковша и вывода его из этого положения, т.е. поворота с помощью гидроцилиндра 4, упор 9 .прекращает удерживать золотник распределителя 8 и он опускается пружиной
50
ключена к ресиверу, упор размещен на штоке гидроцилиндра поворота ковша, а орган управления распределителя выполнен механическим.
вниз, перекрывая напорную магистраль.
Таким образом, использование за счет импульсного воздействия сжатого газа на гибкую оболочку, прикрепленную к внутренней поверхности ковша, последняя совершает колебательные движения, которые сопровождаются вол0
0
5
0
5
нообразными изгибами оболочки, что и обуславливает отделение грунта и эффективную разгрузку ковша. 1
Формула изобретения 1. Рабочее оборудование землеройной машины, содержащее рукоять, ковш с корпусом и боковыми стенками, гидроцилиндр поворота ковша и механизм разгрузки ковша, включающий выталкивающее устройство с приводом, линии высокого и низкого давления, имеющий орган управления распределитель, подключенный к линиям высокого и низкого давления и приводу выталкиваю1чего устройства, и упор, выполненный с возможностью взаимодействия с органом управления распределителем, отличающееся тем, что, с целью повышения надежности рабочего оборудования путем предохранения механизмов выталкивающего устройства от взаимодействия с грунтом, выталкивающее устройство выполнено из гибкой обо.- лочки, прикрепленной жестко к корпусу и боковым стенкам ковша по периметру его кромок и посредством упругих связей в других частях ковша, а привод выталкивающего устройства выполнен из имеющего камеру управления пневмопереключателя, ресивера и регулируемого дросселя, подключенного к ресиверу и пневмопереключателю, который подключен к замкнутой полости, образованной корпусом ковша, erq боковыми стенками и гибкой оболочкой, с возможностью сообщения замкнутой полости в одной из позиций его золот ника с линией высокого давления, а
в другой позиции золотника с линией низкого давления, при этом камера .управления пневмопереключателя под- ,
0
5
ключена к ресиверу, упор размещен на штоке гидроцилиндра поворота ковша, а орган управления распределителя выполнен механическим.
| Рабочее оборудование экскаватора-обратная лопата | 1984 |
|
SU1209773A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рабочее оборудование погрузочной машины | 1986 |
|
SU1377336A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
